LAECIPS: Large Vision Model Assisted Adaptive Edge-Cloud Collaboration for IoT-based Perception System

0
Sign in to get full access
Overview
- This paper proposes a framework called LAECIPS (Large Vision Model Assisted Adaptive Edge-Cloud Collaboration for IoT-based Perception System) that leverages a large vision model and adaptive edge-cloud collaboration to improve the performance of IoT-based perception systems.
- The key ideas include using a large vision model to enhance edge device capabilities, dynamically adjusting the computational load between edge and cloud based on resource availability, and coordinating the "big" and "little" models for efficient inference.
Plain English Explanation
The paper describes a system that aims to improve how Internet of Things (IoT) devices perform visual tasks, like object detection or image classification. These IoT devices often have limited computing power, so the researchers developed a framework that can offload some of the computationally intensive work to a more powerful cloud server.
At the core of this framework is a large, sophisticated vision model that can perform complex visual analysis. This large model is used to enhance the capabilities of the edge devices (the IoT devices themselves). The system dynamically adjusts where the computation happens - sometimes the edge device will handle it, sometimes the cloud server will - based on factors like available resources and the type of task.
The researchers also describe how the large model and the smaller models on the edge devices work together, with the larger model helping to improve the performance of the smaller models. This "big and little" model cooperation allows the overall system to be efficient and effective.
The goal of this work is to enable IoT devices to handle advanced visual perception tasks, like object detection or image classification, without requiring a lot of local computing power. By leveraging both edge and cloud resources in an adaptive way, the system can provide high-quality results while still operating within the constraints of the IoT devices.
Technical Explanation
The paper introduces a framework called LAECIPS (Large Vision Model Assisted Adaptive Edge-Cloud Collaboration for IoT-based Perception System) that aims to address the limitations of IoT devices in performing advanced visual perception tasks.
The key components of the LAECIPS framework include:
-
Large Vision Model: A sophisticated deep learning model is used to enhance the perception capabilities of edge devices. This large model is hosted on the cloud and can perform complex visual analysis tasks.
-
Adaptive Edge-Cloud Collaboration: The system dynamically adjusts the computational load between the edge devices and the cloud based on factors such as resource availability, task type, and latency requirements. This allows the system to optimize performance while operating within the constraints of the IoT devices.
-
Big/Little Model Cooperation: The large vision model hosted on the cloud collaborates with the smaller models running on the edge devices. The large model can help improve the performance of the smaller models, enabling efficient inference on the edge devices.
The researchers evaluate the LAECIPS framework through experiments and demonstrate its effectiveness in improving the performance of IoT-based perception systems compared to traditional approaches.
Critical Analysis
The paper presents a well-designed framework that leverages the strengths of both edge and cloud computing to enhance the visual perception capabilities of IoT devices. The adaptive edge-cloud collaboration and the cooperation between the large and small models are key innovations that address the limitations of IoT devices.
However, the paper does not provide a detailed analysis of the computational and energy efficiency of the LAECIPS framework. While the authors mention that the system can operate within the constraints of IoT devices, a more thorough evaluation of the resource utilization and power consumption would be helpful to fully assess the practicality of the approach.
Additionally, the paper does not discuss the potential privacy and security implications of offloading sensitive visual data to the cloud. As IoT devices are often deployed in people's homes and public spaces, the privacy concerns associated with cloud-based processing should be addressed.
Further research could also explore the generalizability of the LAECIPS framework to other types of IoT applications beyond visual perception, as well as investigate the scalability of the system when dealing with a large number of edge devices.
Conclusion
The LAECIPS framework presented in this paper offers a promising approach to enhancing the visual perception capabilities of IoT devices through the integration of a large vision model and adaptive edge-cloud collaboration. By leveraging the strengths of both edge and cloud computing, the system can provide high-quality results while operating within the constraints of IoT devices.
The key innovations, such as the dynamic adjustment of computational load and the cooperation between large and small models, demonstrate the potential of this framework to address the limitations of traditional IoT-based perception systems. While there are some areas for further research and consideration, the LAECIPS framework represents a significant step forward in enabling advanced visual perception on resource-constrained IoT devices.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
LAECIPS: Large Vision Model Assisted Adaptive Edge-Cloud Collaboration for IoT-based Perception System
Shijing Hu, Ruijun Deng, Xin Du, Zhihui Lu, Qiang Duan, Yi He, Shih-Chia Huang, Jie Wu
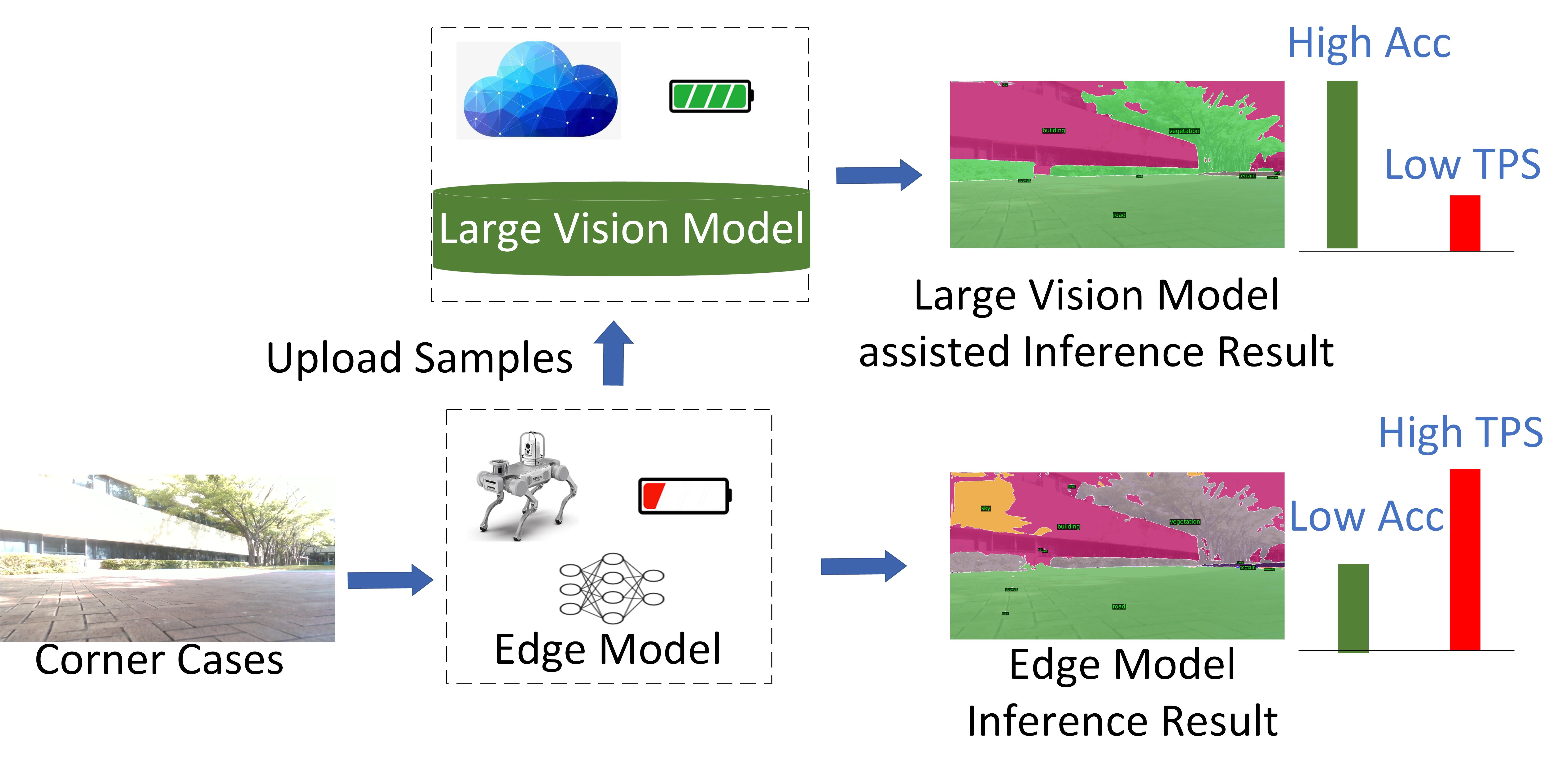
Recent large vision models (e.g., SAM) enjoy great potential to facilitate intelligent perception with high accuracy. Yet, the resource constraints in the IoT environment tend to limit such large vision models to be locally deployed, incurring considerable inference latency thereby making it difficult to support real-time applications, such as autonomous driving and robotics. Edge-cloud collaboration with large-small model co-inference offers a promising approach to achieving high inference accuracy and low latency. However, existing edge-cloud collaboration methods are tightly coupled with the model architecture and cannot adapt to the dynamic data drifts in heterogeneous IoT environments. To address the issues, we propose LAECIPS, a new edge-cloud collaboration framework. In LAECIPS, both the large vision model on the cloud and the lightweight model on the edge are plug-and-play. We design an edge-cloud collaboration strategy based on hard input mining, optimized for both high accuracy and low latency. We propose to update the edge model and its collaboration strategy with the cloud under the supervision of the large vision model, so as to adapt to the dynamic IoT data streams. Theoretical analysis of LAECIPS proves its feasibility. Experiments conducted in a robotic semantic segmentation system using real-world datasets show that LAECIPS outperforms its state-of-the-art competitors in accuracy, latency, and communication overhead while having better adaptability to dynamic environments.
Read more4/17/2024

0
Edge-Cloud Collaborative Motion Planning for Autonomous Driving with Large Language Models
Jiao Chen, Suyan Dai, Fangfang Chen, Zuohong Lv, Jianhua Tang
Integrating large language models (LLMs) into autonomous driving enhances personalization and adaptability in open-world scenarios. However, traditional edge computing models still face significant challenges in processing complex driving data, particularly regarding real-time performance and system efficiency. To address these challenges, this study introduces EC-Drive, a novel edge-cloud collaborative autonomous driving system with data drift detection capabilities. EC-Drive utilizes drift detection algorithms to selectively upload critical data, including new obstacles and traffic pattern changes, to the cloud for processing by GPT-4, while routine data is efficiently managed by smaller LLMs on edge devices. This approach not only reduces inference latency but also improves system efficiency by optimizing communication resource use. Experimental validation confirms the system's robust processing capabilities and practical applicability in real-world driving conditions, demonstrating the effectiveness of this edge-cloud collaboration framework. Our data and system demonstration will be released at https://sites.google.com/view/ec-drive.
Read more8/20/2024

0
Large Models for Aerial Edges: An Edge-Cloud Model Evolution and Communication Paradigm
Shuhang Zhang, Qingyu Liu, Ke Chen, Boya Di, Hongliang Zhang, Wenhan Yang, Dusit Niyato, Zhu Han, H. Vincent Poor
The future sixth-generation (6G) of wireless networks is expected to surpass its predecessors by offering ubiquitous coverage through integrated air-ground facility deployments in both communication and computing domains. In this network, aerial facilities, such as unmanned aerial vehicles (UAVs), conduct artificial intelligence (AI) computations based on multi-modal data to support diverse applications including surveillance and environment construction. However, these multi-domain inference and content generation tasks require large AI models, demanding powerful computing capabilities, thus posing significant challenges for UAVs. To tackle this problem, we propose an integrated edge-cloud model evolution framework, where UAVs serve as edge nodes for data collection and edge model computation. Through wireless channels, UAVs collaborate with ground cloud servers, providing cloud model computation and model updating for edge UAVs. With limited wireless communication bandwidth, the proposed framework faces the challenge of information exchange scheduling between the edge UAVs and the cloud server. To tackle this, we present joint task allocation, transmission resource allocation, transmission data quantization design, and edge model update design to enhance the inference accuracy of the integrated air-ground edge-cloud model evolution framework by mean average precision (mAP) maximization. A closed-form lower bound on the mAP of the proposed framework is derived, and the solution to the mAP maximization problem is optimized accordingly. Simulations, based on results from vision-based classification experiments, consistently demonstrate that the mAP of the proposed framework outperforms both a centralized cloud model framework and a distributed edge model framework across various communication bandwidths and data sizes.
Read more8/12/2024

0
Edge-device Collaborative Computing for Multi-view Classification
Marco Palena, Tania Cerquitelli, Carla Fabiana Chiasserini
Motivated by the proliferation of Internet-of-Thing (IoT) devices and the rapid advances in the field of deep learning, there is a growing interest in pushing deep learning computations, conventionally handled by the cloud, to the edge of the network to deliver faster responses to end users, reduce bandwidth consumption to the cloud, and address privacy concerns. However, to fully realize deep learning at the edge, two main challenges still need to be addressed: (i) how to meet the high resource requirements of deep learning on resource-constrained devices, and (ii) how to leverage the availability of multiple streams of spatially correlated data, to increase the effectiveness of deep learning and improve application-level performance. To address the above challenges, we explore collaborative inference at the edge, in which edge nodes and end devices share correlated data and the inference computational burden by leveraging different ways to split computation and fuse data. Besides traditional centralized and distributed schemes for edge-end device collaborative inference, we introduce selective schemes that decrease bandwidth resource consumption by effectively reducing data redundancy. As a reference scenario, we focus on multi-view classification in a networked system in which sensing nodes can capture overlapping fields of view. The proposed schemes are compared in terms of accuracy, computational expenditure at the nodes, communication overhead, inference latency, robustness, and noise sensitivity. Experimental results highlight that selective collaborative schemes can achieve different trade-offs between the above performance metrics, with some of them bringing substantial communication savings (from 18% to 74% of the transmitted data with respect to centralized inference) while still keeping the inference accuracy well above 90%.
Read more9/25/2024