Large Language Models for Synthetic Participatory Planning of Shared Automated Electric Mobility Systems
2404.12317
0
0
💬
Abstract
Unleashing the synergies of rapidly evolving mobility technologies in a multi-stakeholder landscape presents unique challenges and opportunities for addressing urban transportation problems. This paper introduces a novel synthetic participatory method, critically leveraging large language models (LLMs) to create digital avatars representing diverse stakeholders to plan shared automated electric mobility systems (SAEMS). These calibratable agents collaboratively identify objectives, envision and evaluate SAEMS alternatives, and strategize implementation under risks and constraints. The results of a Montreal case study indicate that a structured and parameterized workflow provides outputs with high controllability and comprehensiveness on an SAEMS plan than generated using a single LLM-enabled expert agent. Consequently, the approach provides a promising avenue for cost-efficiently improving the inclusivity and interpretability of multi-objective transportation planning, suggesting a paradigm shift in how we envision and strategize for sustainable and equitable transportation systems.
Create account to get full access
Overview
- The paper introduces a novel synthetic participatory method that leverages large language models (LLMs) to create digital avatars representing diverse stakeholders for planning shared automated electric mobility systems (SAEMS).
- The approach allows these calibratable agents to collaboratively identify objectives, envision and evaluate SAEMS alternatives, and strategize implementation under risks and constraints.
- A case study in Montreal shows this structured and parameterized workflow provides more comprehensive and controllable outputs on an SAEMS plan compared to using a single LLM-enabled expert agent.
- The research suggests this approach can improve the inclusivity and interpretability of multi-objective transportation planning, leading to a paradigm shift in how we envision and strategize for sustainable and equitable transportation systems.
Plain English Explanation
The paper explores how rapidly evolving mobility technologies, such as automated vehicles and electric vehicles, can be leveraged to address urban transportation challenges. It introduces a new method that uses large language models to create virtual representatives of different stakeholders, like city planners, transportation providers, and community members.
These digital "avatars" can then work together to plan shared automated electric mobility systems (SAEMS) for a city. They identify goals, explore different SAEMS options, and strategize how to implement them, considering the risks and constraints involved. The researchers tested this approach in Montreal and found it generated more comprehensive and controllable plans for SAEMS than using a single expert agent.
The key idea is that by involving diverse stakeholders through these AI-powered avatars, the planning process becomes more inclusive and transparent. This could lead to transportation systems that are better tailored to the needs of the entire community, and ultimately, more sustainable and equitable.
Technical Explanation
The paper presents a novel "synthetic participatory" method that leverages large language models (LLMs) to create calibratable digital avatars representing diverse stakeholders. These avatars collaboratively identify objectives, envision and evaluate alternatives, and strategize implementation for shared automated electric mobility systems (SAEMS).
The researchers conducted a case study in Montreal to test their approach. They parameterized the digital avatars to represent different stakeholder perspectives, such as city planners, transportation providers, and community members. These avatars then worked together to plan an SAEMS system for the city, considering factors like costs, environmental impact, and accessibility.
The results showed that this structured, multi-agent workflow generated SAEMS plans that were more comprehensive and controllable than those produced by a single LLM-enabled expert agent. The authors argue this approach can improve the inclusivity and interpretability of multi-objective transportation planning, suggesting a paradigm shift in how we envision and strategize for sustainable and equitable transportation systems.
Critical Analysis
The paper presents a novel and promising approach to transportation planning that leverages advances in large language models and multi-agent systems. By creating digital avatars to represent diverse stakeholders, the method aims to make the planning process more inclusive and transparent.
However, the research also acknowledges several limitations and areas for further exploration. For example, the authors note the need to better understand how to calibrate the avatars to accurately reflect stakeholder perspectives, and how to ensure the process remains inclusive and equitable in practice. There are also questions about the scalability of the approach and how it might be adapted for different transportation contexts.
Additionally, while the case study in Montreal provides encouraging results, more rigorous validation and testing in other cities would be valuable to assess the generalizability of the method. Potential biases or blindspots in the language models used to create the avatars should also be carefully considered.
Overall, the paper offers a thought-provoking approach to transportation planning that merits further research and development. By leveraging AI to facilitate multi-stakeholder collaboration, it has the potential to drive more holistic and responsive solutions to complex urban mobility challenges.
Conclusion
This paper introduces a novel synthetic participatory method that uses large language models to create digital avatars representing diverse stakeholders for planning shared automated electric mobility systems (SAEMS). The approach allows these calibratable agents to collaboratively identify objectives, envision and evaluate alternatives, and strategize implementation under risks and constraints.
A case study in Montreal demonstrates that this structured and parameterized workflow can generate more comprehensive and controllable SAEMS plans than a single LLM-enabled expert agent. The research suggests this method can improve the inclusivity and interpretability of multi-objective transportation planning, potentially leading to a paradigm shift in how we envision and strategize for sustainable and equitable transportation systems.
While the paper highlights several areas for further exploration, the proposed approach offers a promising avenue for harnessing the synergies of rapidly evolving mobility technologies and diverse stakeholder perspectives to address complex urban transportation challenges.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Large Language Models as Urban Residents: An LLM Agent Framework for Personal Mobility Generation
Jiawei Wang, Renhe Jiang, Chuang Yang, Zengqing Wu, Makoto Onizuka, Ryosuke Shibasaki, Noboru Koshizuka, Chuan Xiao
0
0
This paper introduces a novel approach using Large Language Models (LLMs) integrated into an agent framework for flexible and effective personal mobility generation. LLMs overcome the limitations of previous models by effectively processing semantic data and offering versatility in modeling various tasks. Our approach addresses three research questions: aligning LLMs with real-world urban mobility data, developing reliable activity generation strategies, and exploring LLM applications in urban mobility. The key technical contribution is a novel LLM agent framework that accounts for individual activity patterns and motivations, including a self-consistency approach to align LLMs with real-world activity data and a retrieval-augmented strategy for interpretable activity generation. We evaluate our LLM agent framework and compare it with state-of-the-art personal mobility generation approaches, demonstrating the effectiveness of our approach and its potential applications in urban mobility. Overall, this study marks the pioneering work of designing an LLM agent framework for activity generation based on real-world human activity data, offering a promising tool for urban mobility analysis.
5/24/2024
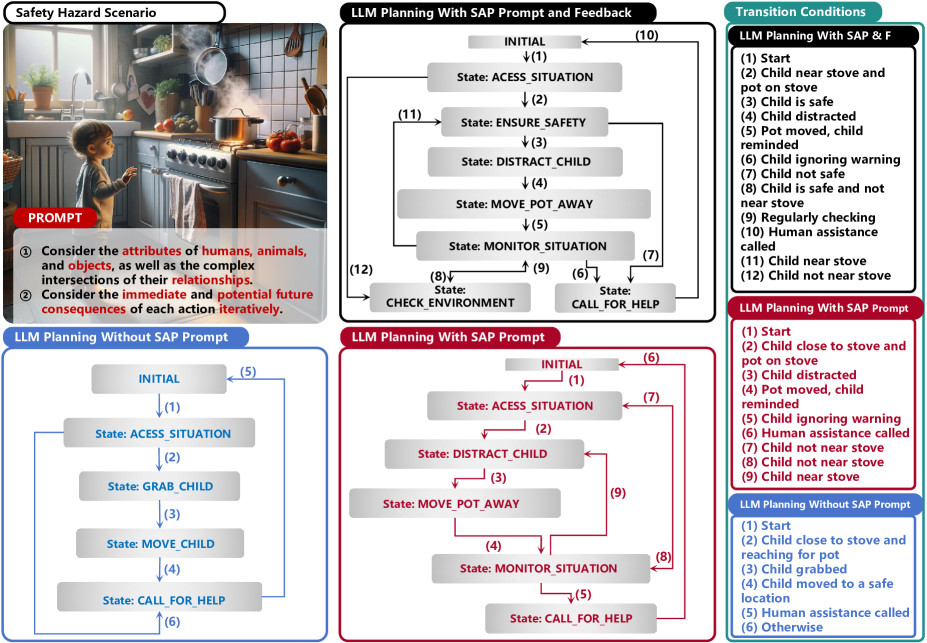
LLM-SAP: Large Language Models Situational Awareness Based Planning
Liman Wang, Hanyang Zhong
0
0
This study explores integrating large language models (LLMs) with situational awareness-based planning (SAP) to enhance the decision-making capabilities of AI agents in dynamic and uncertain environments. We employ a multi-agent reasoning framework to develop a methodology that anticipates and actively mitigates potential risks through iterative feedback and evaluation processes. Our approach diverges from traditional automata theory by incorporating the complexity of human-centric interactions into the planning process, thereby expanding the planning scope of LLMs beyond structured and predictable scenarios. The results demonstrate significant improvements in the model's ability to provide comparative safe actions within hazard interactions, offering a perspective on proactive and reactive planning strategies. This research highlights the potential of LLMs to perform human-like action planning, thereby paving the way for more sophisticated, reliable, and safe AI systems in unpredictable real-world applications.
6/18/2024
🌐
Multimodal Road Network Generation Based on Large Language Model
Jiajing Chen, Weihang Xu, Haiming Cao, Zihuan Xu, Yu Zhang, Zhao Zhang, Siyao Zhang
0
0
With the increasing popularity of ChatGPT, large language models (LLMs) have demonstrated their capabilities in communication and reasoning, promising for transportation sector intelligentization. However, they still face challenges in domain-specific knowledge. This paper aims to leverage LLMs' reasoning and recognition abilities to replace traditional user interfaces and create an intelligent operating system for transportation simulation software, exploring their potential with transportation modeling and simulation. We introduce Network Generation AI (NGAI), integrating LLMs with road network modeling plugins, validated through experiments for accuracy and robustness. NGAI's effective use has reduced modeling costs, revolutionized transportation simulations, optimized user steps, and proposed a novel approach for LLM integration in the transportation field.
4/10/2024
💬
LLM experiments with simulation: Large Language Model Multi-Agent System for Process Simulation Parametrization in Digital Twins
Yuchen Xia, Daniel Dittler, Nasser Jazdi, Haonan Chen, Michael Weyrich
0
0
This paper presents a novel design of a multi-agent system framework that applies a large language model (LLM) to automate the parametrization of process simulations in digital twins. We propose a multi-agent framework that includes four types of agents: observation, reasoning, decision and summarization. By enabling dynamic interaction between LLM agents and simulation model, the developed system can automatically explore the parametrization of the simulation and use heuristic reasoning to determine a set of parameters to control the simulation to achieve an objective. The proposed approach enhances the simulation model by infusing it with heuristics from LLM and enables autonomous search for feasible parametrization to solve a user task. Furthermore, the system has the potential to increase user-friendliness and reduce the cognitive load on human users by assisting in complex decision-making processes. The effectiveness and functionality of the system are demonstrated through a case study, and the visualized demos are available at a GitHub Repository: https://github.com/YuchenXia/LLMDrivenSimulation
5/29/2024