Large Stepsize Gradient Descent for Logistic Loss: Non-Monotonicity of the Loss Improves Optimization Efficiency

0

Sign in to get full access
Overview
- This paper explores the use of large stepsizes in gradient descent optimization for logistic regression on non-separable data.
- The key finding is that non-monotonicity of the loss function can actually improve the optimization efficiency, in contrast to the commonly held belief that monotonic decrease is preferable.
- The research provides theoretical analysis and empirical evidence to support the benefits of large stepsizes and non-monotonic loss functions for logistic regression.
Plain English Explanation
In machine learning, logistic regression is a popular technique for classification tasks. The goal is to find a model that can accurately predict the class (e.g., 0 or 1) given some input data. The model is trained by minimizing a loss function that measures how well the predicted classes match the true classes in the training data.
One common approach to optimize the logistic regression model is to use gradient descent, which iteratively updates the model parameters in the direction that reduces the loss. Traditionally, it has been thought that the loss function should decrease monotonically (constantly go down) during optimization for best results.
However, this paper challenges that assumption. The researchers found that allowing the loss function to temporarily increase or "non-monotonically" decrease can actually improve the efficiency of the optimization process. This is because allowing larger step sizes (how much the parameters are updated at each iteration) can help the model escape local minima and converge to a better solution more quickly.
The key insight is that the logistic loss function has a particular shape that can benefit from this non-monotonic behavior. By embracing temporary increases in the loss, the optimizer can make bigger jumps and ultimately find a lower minimum more efficiently than if it had to strictly decrease the loss at every step.
Technical Explanation
The paper provides a theoretical analysis of the logistic loss function and its properties that enable improved optimization with large stepsizes and non-monotonic behavior. Specifically, the researchers show that the logistic loss is [link to "https://aimodels.fyi/papers/arxiv/convex-sgd-generalization-without-early-stopping"](not strongly convex) in the parameter space, which means the curvature of the loss function varies. This allows for larger stepsizes to be used without causing divergence, as would happen with a strongly convex function.
Furthermore, the link to "https://aimodels.fyi/papers/arxiv/high-probability-convergence-bounds-nonlinear-stochastic-gradient" of the logistic loss creates regions where the gradient points away from the optimum. Embracing these temporary increases in the loss can help the optimizer escape local minima and find a better global solution.
The researchers validate these theoretical insights through extensive experiments on a variety of datasets and model configurations. They compare the performance of gradient descent with large stepsizes to standard small-stepsize methods, demonstrating significant improvements in optimization efficiency and final model accuracy.
Critical Analysis
The paper provides a convincing argument for the benefits of large stepsizes and non-monotonic loss behavior in logistic regression optimization. The theoretical analysis is rigorous, and the empirical results strongly support the claimed advantages.
However, the paper does not address potential downsides or limitations of this approach. For example, it is unclear how well the method would generalize to other types of loss functions or model architectures beyond logistic regression. Additionally, the authors do not discuss the sensitivity of the approach to hyperparameter settings, such as the initial stepsize or the criteria for allowing non-monotonic updates.
Further research could explore the [link to "https://aimodels.fyi/papers/arxiv/random-scaling-momentum-non-smooth-non-convex"](robustness and stability) of this optimization technique across a wider range of machine learning problems. It would also be valuable to understand the practical implications and potential challenges of implementing large-stepsize gradient descent in real-world applications.
Conclusion
This paper presents a novel approach to optimizing logistic regression models by embracing non-monotonic behavior of the loss function. The key insight is that allowing temporary increases in the loss can enable the use of larger step sizes, which can lead to more efficient optimization and better final model performance.
The theoretical analysis and empirical results demonstrate the potential benefits of this technique, challenging the common assumption that monotonic decrease of the loss is always desirable. This research opens up new avenues for exploring optimization methods that can better navigate the complex landscape of machine learning loss functions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Large Stepsize Gradient Descent for Logistic Loss: Non-Monotonicity of the Loss Improves Optimization Efficiency
Jingfeng Wu, Peter L. Bartlett, Matus Telgarsky, Bin Yu
We consider gradient descent (GD) with a constant stepsize applied to logistic regression with linearly separable data, where the constant stepsize $eta$ is so large that the loss initially oscillates. We show that GD exits this initial oscillatory phase rapidly -- in $mathcal{O}(eta)$ steps -- and subsequently achieves an $tilde{mathcal{O}}(1 / (eta t) )$ convergence rate after $t$ additional steps. Our results imply that, given a budget of $T$ steps, GD can achieve an accelerated loss of $tilde{mathcal{O}}(1/T^2)$ with an aggressive stepsize $eta:= Theta( T)$, without any use of momentum or variable stepsize schedulers. Our proof technique is versatile and also handles general classification loss functions (where exponential tails are needed for the $tilde{mathcal{O}}(1/T^2)$ acceleration), nonlinear predictors in the neural tangent kernel regime, and online stochastic gradient descent (SGD) with a large stepsize, under suitable separability conditions.
Read more6/11/2024

0
Gradient Descent on Logistic Regression with Non-Separable Data and Large Step Sizes
Si Yi Meng, Antonio Orvieto, Daniel Yiming Cao, Christopher De Sa
We study gradient descent (GD) dynamics on logistic regression problems with large, constant step sizes. For linearly-separable data, it is known that GD converges to the minimizer with arbitrarily large step sizes, a property which no longer holds when the problem is not separable. In fact, the behaviour can be much more complex -- a sequence of period-doubling bifurcations begins at the critical step size $2/lambda$, where $lambda$ is the largest eigenvalue of the Hessian at the solution. Using a smaller-than-critical step size guarantees convergence if initialized nearby the solution: but does this suffice globally? In one dimension, we show that a step size less than $1/lambda$ suffices for global convergence. However, for all step sizes between $1/lambda$ and the critical step size $2/lambda$, one can construct a dataset such that GD converges to a stable cycle. In higher dimensions, this is actually possible even for step sizes less than $1/lambda$. Our results show that although local convergence is guaranteed for all step sizes less than the critical step size, global convergence is not, and GD may instead converge to a cycle depending on the initialization.
Read more6/10/2024

0
Large Stepsize Gradient Descent for Non-Homogeneous Two-Layer Networks: Margin Improvement and Fast Optimization
Yuhang Cai, Jingfeng Wu, Song Mei, Michael Lindsey, Peter L. Bartlett
The typical training of neural networks using large stepsize gradient descent (GD) under the logistic loss often involves two distinct phases, where the empirical risk oscillates in the first phase but decreases monotonically in the second phase. We investigate this phenomenon in two-layer networks that satisfy a near-homogeneity condition. We show that the second phase begins once the empirical risk falls below a certain threshold, dependent on the stepsize. Additionally, we show that the normalized margin grows nearly monotonically in the second phase, demonstrating an implicit bias of GD in training non-homogeneous predictors. If the dataset is linearly separable and the derivative of the activation function is bounded away from zero, we show that the average empirical risk decreases, implying that the first phase must stop in finite steps. Finally, we demonstrate that by choosing a suitably large stepsize, GD that undergoes this phase transition is more efficient than GD that monotonically decreases the risk. Our analysis applies to networks of any width, beyond the well-known neural tangent kernel and mean-field regimes.
Read more6/28/2024
1
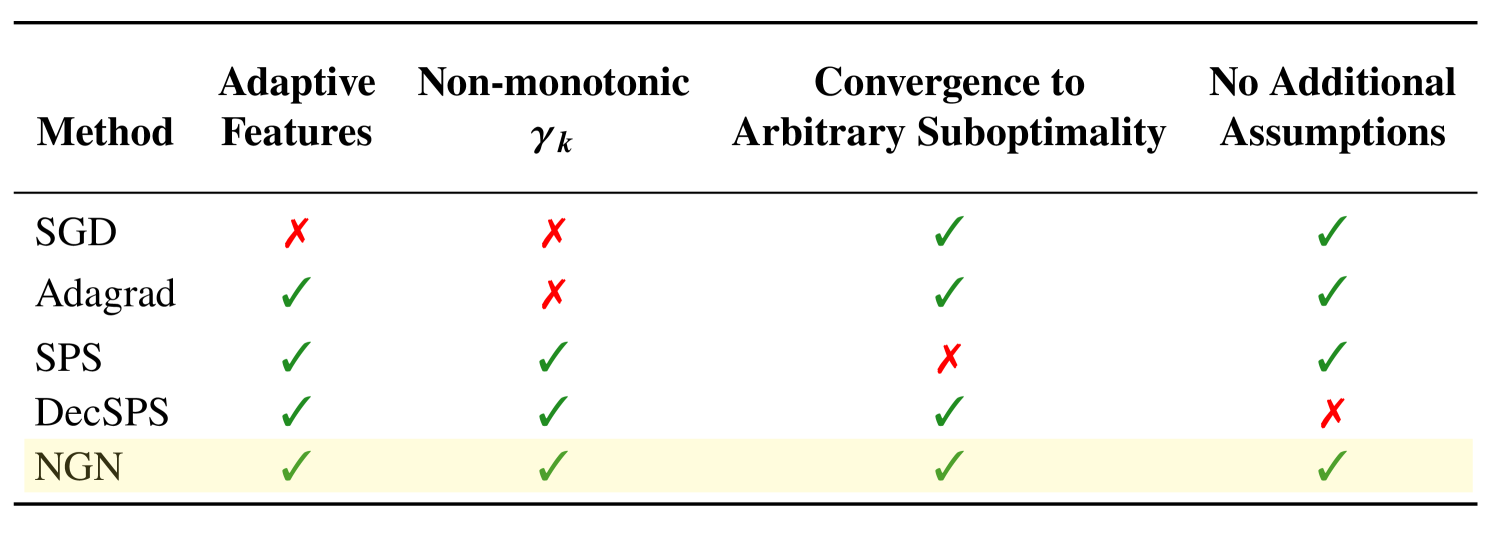
An Adaptive Stochastic Gradient Method with Non-negative Gauss-Newton Stepsizes
Antonio Orvieto, Lin Xiao
We consider the problem of minimizing the average of a large number of smooth but possibly non-convex functions. In the context of most machine learning applications, each loss function is non-negative and thus can be expressed as the composition of a square and its real-valued square root. This reformulation allows us to apply the Gauss-Newton method, or the Levenberg-Marquardt method when adding a quadratic regularization. The resulting algorithm, while being computationally as efficient as the vanilla stochastic gradient method, is highly adaptive and can automatically warmup and decay the effective stepsize while tracking the non-negative loss landscape. We provide a tight convergence analysis, leveraging new techniques, in the stochastic convex and non-convex settings. In particular, in the convex case, the method does not require access to the gradient Lipshitz constant for convergence, and is guaranteed to never diverge. The convergence rates and empirical evaluations compare favorably to the classical (stochastic) gradient method as well as to several other adaptive methods.
Read more7/8/2024