Learning Based Toolpath Planner on Diverse Graphs for 3D Printing

0

Sign in to get full access
Overview
- This paper presents a novel learning-based toolpath planning approach for 3D printing that works on diverse graph structures.
- The method leverages reinforcement learning to generate efficient toolpaths for different 3D printing technologies, including wire-frame models and continuous fiber deposition.
- The proposed approach is evaluated on several benchmark 3D printing tasks and demonstrates improved performance compared to traditional planning algorithms.
Plain English Explanation
The paper discusses a new way to plan the movement of the print head (called the "toolpath") when 3D printing objects. This is an important problem because the toolpath greatly impacts the quality and speed of the 3D printing process.
The key innovation is the use of a reinforcement learning algorithm to automatically learn how to plan efficient toolpaths. Reinforcement learning is a type of machine learning where an agent (in this case, the planning algorithm) learns by trial and error to optimize a reward signal.
The algorithm is designed to work with different types of 3D printing technologies, including wire-frame models and continuous fiber deposition. This flexibility is achieved by representing the 3D printing task as a graph, where the nodes represent different points in the object and the edges represent potential toolpath segments.
The reinforcement learning algorithm learns to navigate this graph efficiently, discovering toolpaths that are faster, more accurate, and better suited to the constraints of the particular 3D printing technology being used. This allows the algorithm to outperform traditional toolpath planning approaches, as demonstrated on several benchmark 3D printing tasks.
Technical Explanation
The paper presents a learning-based toolpath planning approach for 3D printing that operates on diverse graph structures. The key components of the method are:
-
Graph Representation: The 3D printing task is represented as a graph, where the nodes correspond to points in the object and the edges represent potential toolpath segments. This flexible graph-based formulation allows the method to handle a variety of 3D printing technologies, including wire-frame models and continuous fiber deposition.
-
Reinforcement Learning: A reinforcement learning agent is trained to navigate the graph and generate efficient toolpaths. The agent learns by trial and error to optimize a reward signal that captures the quality and speed of the 3D printing process.
-
Neural Network Architecture: The reinforcement learning agent is implemented using a deep neural network that takes the current state of the graph (i.e., the partially completed toolpath) as input and outputs the next action (i.e., the next toolpath segment to add).
-
Experimental Evaluation: The proposed approach is evaluated on several benchmark 3D printing tasks, including wire-frame models and continuous fiber deposition. The results demonstrate that the learning-based method outperforms traditional toolpath planning algorithms in terms of print quality, speed, and adherence to technology-specific constraints.
Critical Analysis
The paper presents a promising approach to toolpath planning for 3D printing that leverages the flexibility of graph representations and the power of reinforcement learning. However, there are a few potential limitations and areas for further research:
-
Computational Complexity: Training the reinforcement learning agent may be computationally intensive, especially for larger or more complex 3D models. The authors do not provide detailed information on the training time or resource requirements of their approach.
-
Generalization: While the method is designed to work with diverse 3D printing technologies, the authors only evaluate it on a limited set of benchmark tasks. More research is needed to understand how well the approach generalizes to a wider range of 3D printing scenarios and manufacturing constraints.
-
Interpretability: Reinforcement learning models can be difficult to interpret, which may limit their adoption in industrial settings where transparency and explainability are important. Developing more interpretable versions of the planning algorithm could improve its acceptance and real-world impact.
-
Hardware Integration: The paper focuses on the planning algorithm and does not discuss how the toolpaths would be integrated with the low-level control systems of 3D printers. Addressing this hardware-software interface could be an important next step for transitioning the approach to practical applications.
Conclusion
This paper presents a novel learning-based toolpath planning approach for 3D printing that operates on diverse graph structures. By leveraging reinforcement learning, the method is able to automatically generate efficient toolpaths that are tailored to the specific requirements of different 3D printing technologies, such as wire-frame models and continuous fiber deposition.
The results demonstrate the effectiveness of the proposed approach compared to traditional planning algorithms, suggesting that it could be a valuable tool for improving the speed, quality, and flexibility of 3D printing processes. However, further research is needed to address potential limitations related to computational complexity, generalization, interpretability, and hardware integration.
Overall, this work represents an important step forward in the field of 3D printing by introducing a powerful, data-driven approach to the critical problem of toolpath planning.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Learning Based Toolpath Planner on Diverse Graphs for 3D Printing
Yuming Huang, Yuhu Guo, Renbo Su, Xingjian Han, Junhao Ding, Tianyu Zhang, Tao Liu, Weiming Wang, Guoxin Fang, Xu Song, Emily Whiting, Charlie C. L. Wang
This paper presents a learning based planner for computing optimized 3D printing toolpaths on prescribed graphs, the challenges of which include the varying graph structures on different models and the large scale of nodes & edges on a graph. We adopt an on-the-fly strategy to tackle these challenges, formulating the planner as a Deep Q-Network (DQN) based optimizer to decide the next `best' node to visit. We construct the state spaces by the Local Search Graph (LSG) centered at different nodes on a graph, which is encoded by a carefully designed algorithm so that LSGs in similar configurations can be identified to re-use the earlier learned DQN priors for accelerating the computation of toolpath planning. Our method can cover different 3D printing applications by defining their corresponding reward functions. Toolpath planning problems in wire-frame printing, continuous fiber printing, and metallic printing are selected to demonstrate its generality. The performance of our planner has been verified by testing the resultant toolpaths in physical experiments. By using our planner, wire-frame models with up to 4.2k struts can be successfully printed, up to 93.3% of sharp turns on continuous fiber toolpaths can be avoided, and the thermal distortion in metallic printing can be reduced by 24.9%.
Read more8/20/2024
🤿
0
Deep Reinforcement Learning with Dynamic Graphs for Adaptive Informative Path Planning
Apoorva Vashisth, Julius Ruckin, Federico Magistri, Cyrill Stachniss, Marija Popovi'c
Autonomous robots are often employed for data collection due to their efficiency and low labour costs. A key task in robotic data acquisition is planning paths through an initially unknown environment to collect observations given platform-specific resource constraints, such as limited battery life. Adaptive online path planning in 3D environments is challenging due to the large set of valid actions and the presence of unknown occlusions. To address these issues, we propose a novel deep reinforcement learning approach for adaptively replanning robot paths to map targets of interest in unknown 3D environments. A key aspect of our approach is a dynamically constructed graph that restricts planning actions local to the robot, allowing us to react to newly discovered static obstacles and targets of interest. For replanning, we propose a new reward function that balances between exploring the unknown environment and exploiting online-discovered targets of interest. Our experiments show that our method enables more efficient target discovery compared to state-of-the-art learning and non-learning baselines. We also showcase our approach for orchard monitoring using an unmanned aerial vehicle in a photorealistic simulator. We open-source our code and model at: https://github.com/dmar-bonn/ipp-rl-3d.
Read more7/8/2024
🤿
0
Deep Reinforcement Learning Based Toolpath Generation for Thermal Uniformity in Laser Powder Bed Fusion Process
Mian Qin, Junhao Ding, Shuo Qu, Xu Song, Charlie C. L. Wang, Wei-Hsin Liao
Laser powder bed fusion (LPBF) is a widely used metal additive manufacturing technology. However, the accumulation of internal residual stress during printing can cause significant distortion and potential failure. Although various scan patterns have been studied to reduce possible accumulated stress, such as zigzag scanning vectors with changing directions or a chessboard-based scan pattern with divided small islands, most conventional scan patterns cannot significantly reduce residual stress. The proposed adaptive toolpath generation (ATG) algorithms, aiming to minimize the thermal gradients, may result in extremely accumulated temperature fields in some cases. To address these issues, we developed a deep reinforcement learning (DRL)-based toolpath generation framework, with the goal of achieving uniformly distributed heat and avoiding extremely thermal accumulation regions during the LPBF process. We first developed an overall pipeline for the DRL-based toolpath generation framework, which includes uniformly sampling, agent moving and environment observation, action selection, moving constraints, rewards calculation, and the training process. To accelerate the training process, we simplified the data-intensive numerical model by considering the turning angles on the toolpath. We designed the action spaces with three options, including the minimum temperature value, the smoothest path, and the second smoothest path. The reward function was designed to minimize energy density to ensure the temperature field remains relatively stable. To verify the effectiveness of the proposed DRL-based toolpath generation framework, we performed numerical simulations of polygon shape printing domains. In addition, four groups of thin plate samples with different scan patterns were compared using the LPBF process.
Read more4/12/2024
0
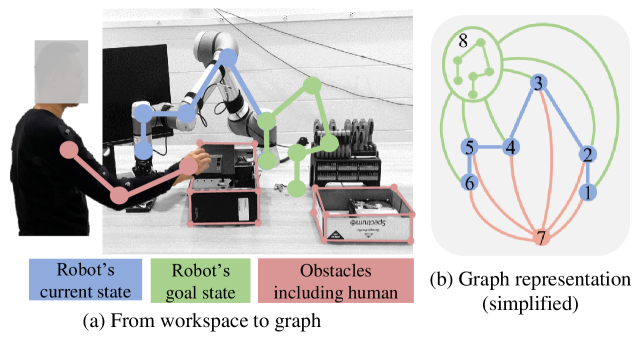
KG-Planner: Knowledge-Informed Graph Neural Planning for Collaborative Manipulators
Wansong Liu, Kareem Eltouny, Sibo Tian, Xiao Liang, Minghui Zheng
This paper presents a novel knowledge-informed graph neural planner (KG-Planner) to address the challenge of efficiently planning collision-free motions for robots in high-dimensional spaces, considering both static and dynamic environments involving humans. Unlike traditional motion planners that struggle with finding a balance between efficiency and optimality, the KG-Planner takes a different approach. Instead of relying solely on a neural network or imitating the motions of an oracle planner, our KG-Planner integrates explicit physical knowledge from the workspace. The integration of knowledge has two key aspects: (1) we present an approach to design a graph that can comprehensively model the workspace's compositional structure. The designed graph explicitly incorporates critical elements such as robot joints, obstacles, and their interconnections. This representation allows us to capture the intricate relationships between these elements. (2) We train a Graph Neural Network (GNN) that excels at generating nearly optimal robot motions. In particular, the GNN employs a layer-wise propagation rule to facilitate the exchange and update of information among workspace elements based on their connections. This propagation emphasizes the influence of these elements throughout the planning process. To validate the efficacy and efficiency of our KG-Planner, we conduct extensive experiments in both static and dynamic environments. These experiments include scenarios with and without human workers. The results of our approach are compared against existing methods, showcasing the superior performance of the KG-Planner. A short video introduction of this work is available (video link provided in the paper).
Read more5/14/2024