Learning Manipulation Skills through Robot Chain-of-Thought with Sparse Failure Guidance
2405.13573
0
0
🛠️
Abstract
Defining reward functions for skill learning has been a long-standing challenge in robotics. Recently, vision-language models (VLMs) have shown promise in defining reward signals for teaching robots manipulation skills. However, existing works often provide reward guidance that is too coarse, leading to inefficient learning processes. In this paper, we address this issue by implementing more fine-grained reward guidance. We decompose tasks into simpler sub-tasks, using this decomposition to offer more informative reward guidance with VLMs. We also propose a VLM-based self imitation learning process to speed up learning. Empirical evidence demonstrates that our algorithm consistently outperforms baselines such as CLIP, LIV, and RoboCLIP. Specifically, our algorithm achieves a $5.4 times$ higher average success rate compared to the best baseline, RoboCLIP, across a series of manipulation tasks.
Create account to get full access
Overview
- This paper explores the challenge of teaching robots manipulation skills through language instruction.
- The researchers propose using vision-language models as a superior source of rewards for agents to learn these skills.
- Their method decomposes complex tasks into simpler sub-goals, enabling better task comprehension and avoiding potential failures with sparse failure guidance.
- Empirical evidence shows their algorithm consistently outperforms baselines like CLIP, LIV, and RoboCLIP.
Plain English Explanation
Teaching robots to manipulate objects using language instructions has been a long-standing challenge. Recently, vision-language models have made progress in this area, but their performance is limited to simple tasks. This paper proposes using these models as a better source of rewards to help agents learn a wider range of robotic manipulation skills.
The key idea is to break down complex tasks into smaller, more manageable sub-goals. This helps the agents better understand the tasks and avoids potential failures that can occur when the feedback signals are too sparse. The researchers show their algorithm consistently outperforms other leading approaches, achieving a 5.4 times higher average success rate on a variety of manipulation tasks.
Technical Explanation
The paper presents a novel approach that leverages vision-language models to provide rewards for agents learning robotic manipulation skills. Unlike previous methods that relied on sparse feedback, the researchers decompose complex tasks into simpler sub-goals, enabling the agents to better comprehend the overall objective.
Specifically, the authors use a reward modeling approach, where a vision-language model is trained to predict the expected reward for a given state-action pair. This reward model is then used to guide the agent's exploration and learning process, helping it efficiently navigate the task space and avoid potential pitfalls.
The researchers evaluate their method on a diverse set of robotic manipulation tasks and compare its performance to CLIP, LIV, and RoboCLIP. The results demonstrate that their algorithm consistently outperforms these baselines, achieving a 5.4 times higher average success rate across the evaluated tasks.
Critical Analysis
The paper presents a promising approach to leveraging vision-language models for teaching robots manipulation skills. By decomposing complex tasks into simpler sub-goals, the method helps agents better understand the overall objective and avoid potential failures associated with sparse feedback.
However, the paper does not address the potential limitations of this approach. For example, the researchers do not discuss how their method might scale to even more complex tasks or how it might perform in real-world environments with additional challenges, such as partial observability or dynamic obstacles.
Additionally, the paper could benefit from a more thorough discussion of the potential drawbacks or failure modes of the proposed algorithm. While the empirical results are impressive, it would be valuable to understand the scenarios in which the method might struggle or produce unexpected behavior.
Overall, the research presented in this paper represents an interesting and valuable contribution to the field of robotic manipulation. However, further investigation into the limitations and potential areas for improvement would help provide a more comprehensive understanding of the approach.
Conclusion
This paper introduces a novel approach to teaching robots manipulation skills using vision-language models as a source of rewards. By decomposing complex tasks into simpler sub-goals, the method enables better task comprehension and avoids potential failures associated with sparse feedback.
The empirical results demonstrate the effectiveness of the proposed algorithm, which consistently outperforms leading baselines on a wide range of robotic manipulation tasks. This work represents an important step towards developing more capable and versatile robotic systems that can learn complex skills through language-based instruction.
Overall, the research presented in this paper has significant implications for the field of robotics and the development of agents that can effectively learn and execute manipulation tasks in diverse real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Contrastive Imitation Learning for Language-guided Multi-Task Robotic Manipulation
Teli Ma, Jiaming Zhou, Zifan Wang, Ronghe Qiu, Junwei Liang
0
0
Developing robots capable of executing various manipulation tasks, guided by natural language instructions and visual observations of intricate real-world environments, remains a significant challenge in robotics. Such robot agents need to understand linguistic commands and distinguish between the requirements of different tasks. In this work, we present Sigma-Agent, an end-to-end imitation learning agent for multi-task robotic manipulation. Sigma-Agent incorporates contrastive Imitation Learning (contrastive IL) modules to strengthen vision-language and current-future representations. An effective and efficient multi-view querying Transformer (MVQ-Former) for aggregating representative semantic information is introduced. Sigma-Agent shows substantial improvement over state-of-the-art methods under diverse settings in 18 RLBench tasks, surpassing RVT by an average of 5.2% and 5.9% in 10 and 100 demonstration training, respectively. Sigma-Agent also achieves 62% success rate with a single policy in 5 real-world manipulation tasks. The code will be released upon acceptance.
6/17/2024
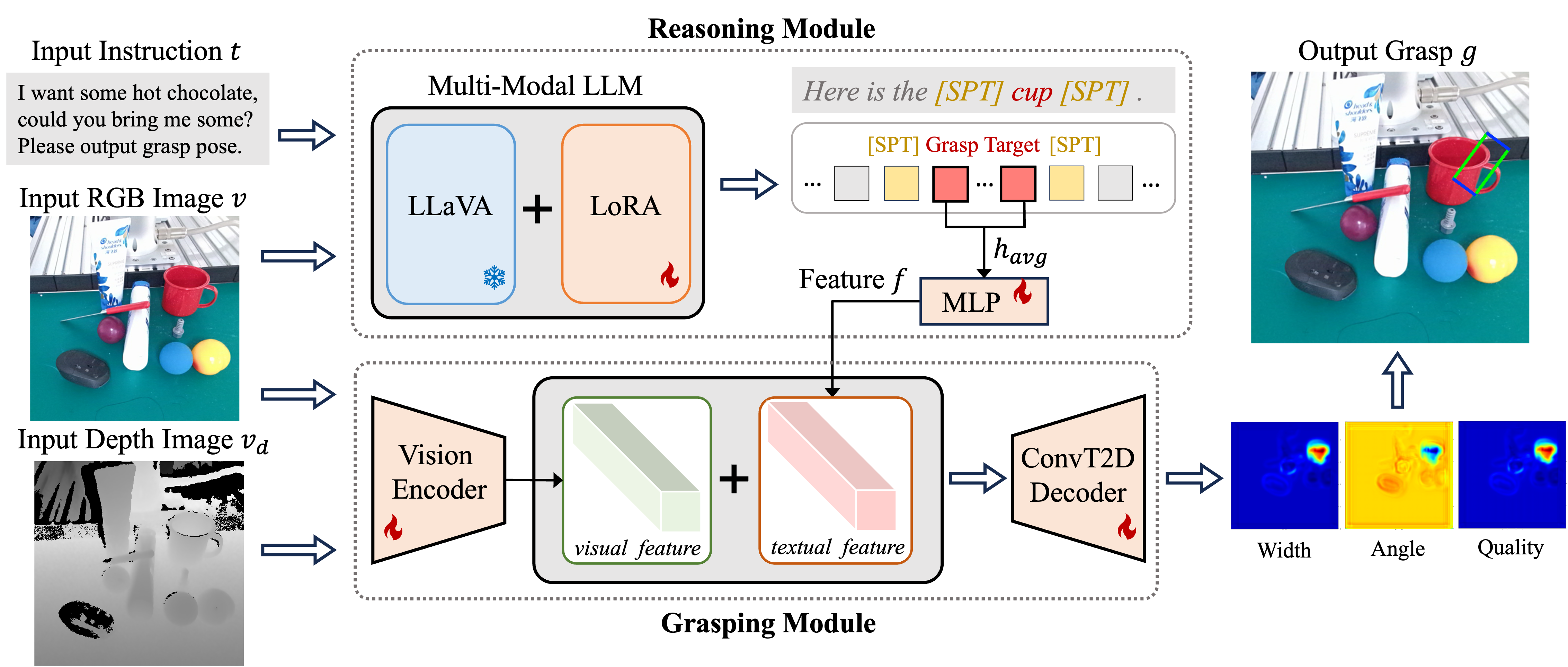
Reasoning Grasping via Multimodal Large Language Model
Shiyu Jin, Jinxuan Xu, Yutian Lei, Liangjun Zhang
0
0
Despite significant progress in robotic systems for operation within human-centric environments, existing models still heavily rely on explicit human commands to identify and manipulate specific objects. This limits their effectiveness in environments where understanding and acting on implicit human intentions are crucial. In this study, we introduce a novel task: reasoning grasping, where robots need to generate grasp poses based on indirect verbal instructions or intentions. To accomplish this, we propose an end-to-end reasoning grasping model that integrates a multi-modal Large Language Model (LLM) with a vision-based robotic grasping framework. In addition, we present the first reasoning grasping benchmark dataset generated from the GraspNet-1 billion, incorporating implicit instructions for object-level and part-level grasping, and this dataset will soon be available for public access. Our results show that directly integrating CLIP or LLaVA with the grasp detection model performs poorly on the challenging reasoning grasping tasks, while our proposed model demonstrates significantly enhanced performance both in the reasoning grasping benchmark and real-world experiments.
4/29/2024

Manipulate-Anything: Automating Real-World Robots using Vision-Language Models
Jiafei Duan, Wentao Yuan, Wilbert Pumacay, Yi Ru Wang, Kiana Ehsani, Dieter Fox, Ranjay Krishna
0
0
Large-scale endeavors like RT-1 and widespread community efforts such as Open-X-Embodiment have contributed to growing the scale of robot demonstration data. However, there is still an opportunity to improve the quality, quantity, and diversity of robot demonstration data. Although vision-language models have been shown to automatically generate demonstration data, their utility has been limited to environments with privileged state information, they require hand-designed skills, and are limited to interactions with few object instances. We propose Manipulate-Anything, a scalable automated generation method for real-world robotic manipulation. Unlike prior work, our method can operate in real-world environments without any privileged state information, hand-designed skills, and can manipulate any static object. We evaluate our method using two setups. First, Manipulate-Anything successfully generates trajectories for all 5 real-world and 12 simulation tasks, significantly outperforming existing methods like VoxPoser. Second, Manipulate-Anything's demonstrations can train more robust behavior cloning policies than training with human demonstrations, or from data generated by VoxPoser and Code-As-Policies. We believe Manipulate-Anything can be the scalable method for both generating data for robotics and solving novel tasks in a zero-shot setting.
7/1/2024
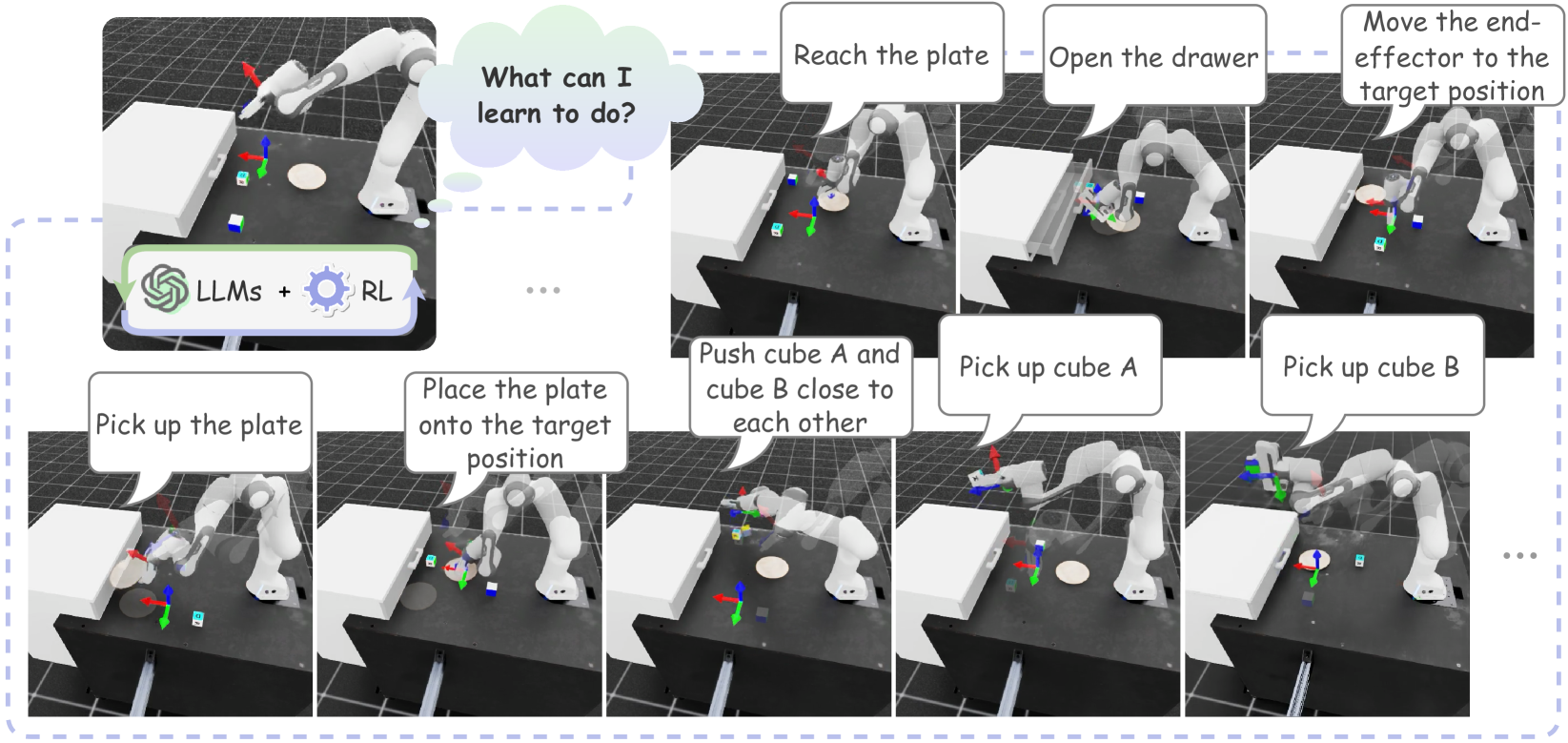
Agentic Skill Discovery
Xufeng Zhao, Cornelius Weber, Stefan Wermter
0
0
Language-conditioned robotic skills make it possible to apply the high-level reasoning of Large Language Models (LLMs) to low-level robotic control. A remaining challenge is to acquire a diverse set of fundamental skills. Existing approaches either manually decompose a complex task into atomic robotic actions in a top-down fashion, or bootstrap as many combinations as possible in a bottom-up fashion to cover a wider range of task possibilities. These decompositions or combinations, however, require an initial skill library. For example, a grasping capability can never emerge from a skill library containing only diverse pushing skills. Existing skill discovery techniques with reinforcement learning acquire skills by an exhaustive exploration but often yield non-meaningful behaviors. In this study, we introduce a novel framework for skill discovery that is entirely driven by LLMs. The framework begins with an LLM generating task proposals based on the provided scene description and the robot's configurations, aiming to incrementally acquire new skills upon task completion. For each proposed task, a series of reinforcement learning processes are initiated, utilizing reward and success determination functions sampled by the LLM to develop the corresponding policy. The reliability and trustworthiness of learned behaviors are further ensured by an independent vision-language model. We show that starting with zero skill, the ASD skill library emerges and expands to more and more meaningful and reliable skills, enabling the robot to efficiently further propose and complete advanced tasks. The project page can be found at: https://agentic-skill-discovery.github.io.
5/27/2024