Agentic Skill Discovery
2405.15019
0
0
Abstract
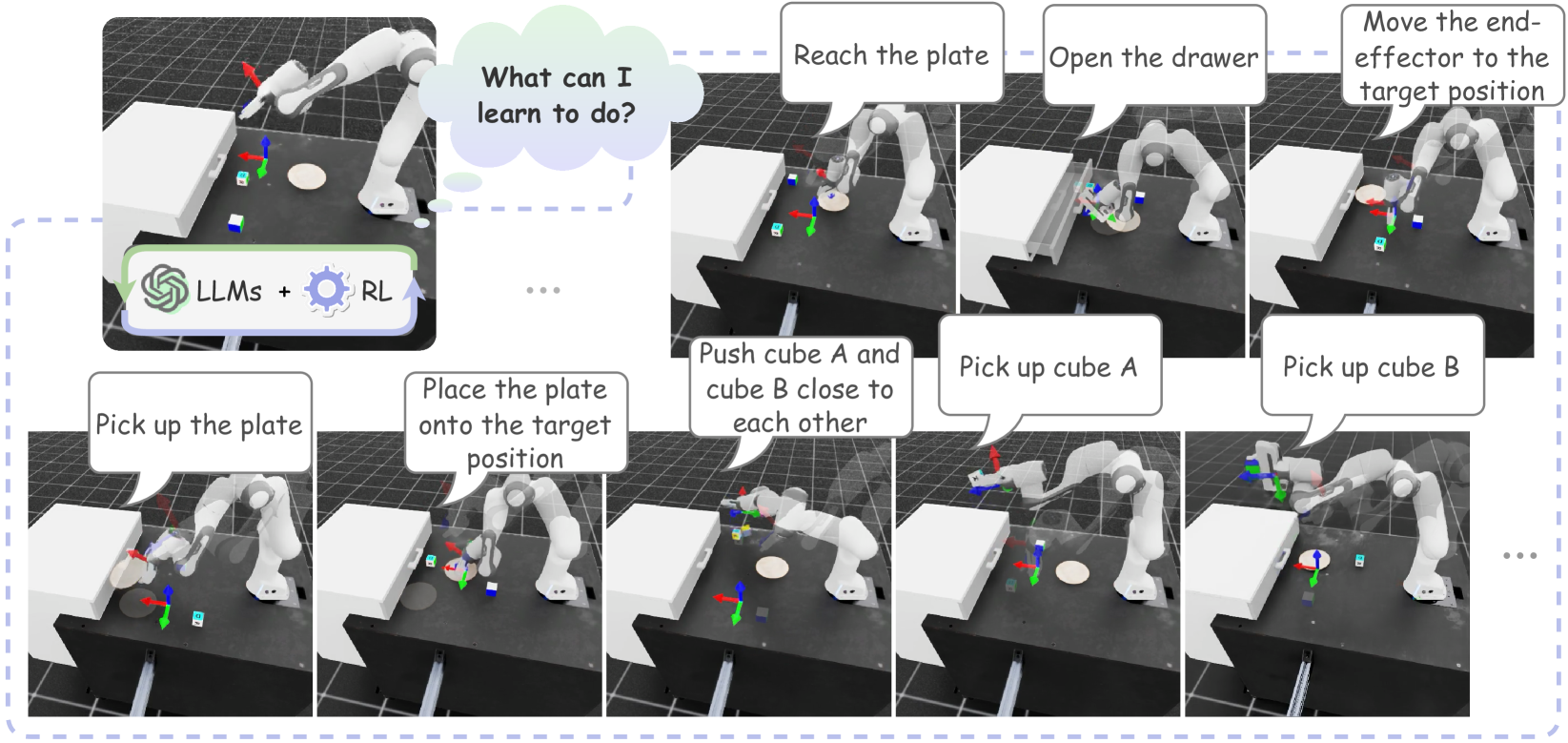
Language-conditioned robotic skills make it possible to apply the high-level reasoning of Large Language Models (LLMs) to low-level robotic control. A remaining challenge is to acquire a diverse set of fundamental skills. Existing approaches either manually decompose a complex task into atomic robotic actions in a top-down fashion, or bootstrap as many combinations as possible in a bottom-up fashion to cover a wider range of task possibilities. These decompositions or combinations, however, require an initial skill library. For example, a grasping capability can never emerge from a skill library containing only diverse pushing skills. Existing skill discovery techniques with reinforcement learning acquire skills by an exhaustive exploration but often yield non-meaningful behaviors. In this study, we introduce a novel framework for skill discovery that is entirely driven by LLMs. The framework begins with an LLM generating task proposals based on the provided scene description and the robot's configurations, aiming to incrementally acquire new skills upon task completion. For each proposed task, a series of reinforcement learning processes are initiated, utilizing reward and success determination functions sampled by the LLM to develop the corresponding policy. The reliability and trustworthiness of learned behaviors are further ensured by an independent vision-language model. We show that starting with zero skill, the ASD skill library emerges and expands to more and more meaningful and reliable skills, enabling the robot to efficiently further propose and complete advanced tasks. The project page can be found at: https://agentic-skill-discovery.github.io.
Create account to get full access
Overview
- This paper introduces "Agentic Skill Discovery," a novel approach for enabling agents to discover and acquire skills in complex environments.
- The key idea is to empower agents to actively explore and discover skills that are useful for achieving their goals, rather than relying solely on predefined skill sets.
- The research combines concepts from reinforcement learning, meta-learning, and hierarchical task decomposition to enable agents to autonomously identify and learn new skills.
Plain English Explanation
The paper describes a new way for AI agents to learn and improve their abilities on their own. Instead of just being trained on a fixed set of skills, the agents are given the freedom to explore their environment and discover new skills that could be useful for achieving their goals.
This is done by combining several different machine learning techniques, including reinforcement learning, meta-learning, and hierarchical task decomposition. The agents essentially learn how to learn - they figure out for themselves what skills are important and how to acquire them.
The key advantage of this approach is that it allows the agents to adapt and grow their capabilities over time, rather than being limited to a predefined set of skills. This could be especially useful in complex or dynamic environments where the optimal skills to have may change.
Technical Explanation
The core of the "Agentic Skill Discovery" approach is a reinforcement learning agent that is equipped with the ability to autonomously discover and acquire new skills. This is achieved through a hierarchical framework that separates the agent's decision-making into high-level goals and lower-level skills.
The agent maintains a repertoire of skills, which it can flexibly combine and refine through interaction with the environment. When faced with a new task, the agent first attempts to solve it using its existing skills. If this is not successful, it enters a "skill discovery" mode, where it systematically explores the environment to identify new skills that could be useful.
This skill discovery process is guided by a meta-learning component, which allows the agent to learn how to effectively explore its environment and acquire new skills. The agent uses this meta-knowledge to direct its exploration towards skills that are likely to be beneficial for achieving its current goals.
The discovered skills are then incorporated into the agent's repertoire, which can be further refined and combined through continued learning. This cyclical process of skill discovery, acquisition, and refinement enables the agent to continuously expand its capabilities over time.
Critical Analysis
The "Agentic Skill Discovery" approach represents an important step towards more flexible and adaptable AI systems. By empowering agents to autonomously discover and learn new skills, it addresses a key limitation of many existing AI systems, which are often constrained by their predefined skill sets.
However, the paper also acknowledges some potential limitations and challenges. For instance, the skill discovery process can be computationally expensive, and the agent may struggle to discover truly novel skills that are not closely related to its existing repertoire. Additionally, the paper does not address how the discovered skills could be effectively transferred to new tasks or environments, which is an important area for further research.
Despite these challenges, the core idea of enabling agents to actively explore and discover new skills is a promising direction for advancing the field of artificial intelligence. By following this path, researchers may be able to create AI systems that are more robust, flexible, and capable of adapting to a wide range of complex, real-world scenarios.
Conclusion
The "Agentic Skill Discovery" paper presents a novel approach for enabling AI agents to autonomously discover and acquire new skills, rather than relying solely on predefined skill sets. By combining reinforcement learning, meta-learning, and hierarchical task decomposition, the agents can systematically explore their environment, identify useful skills, and continuously expand their capabilities over time.
This work represents an important step towards more flexible and adaptable AI systems, with the potential to overcome the limitations of many existing AI approaches. While there are still challenges to be addressed, the core idea of empowering agents to actively discover and learn new skills is a promising direction for future research in artificial intelligence.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Language Guided Skill Discovery
Seungeun Rho, Laura Smith, Tianyu Li, Sergey Levine, Xue Bin Peng, Sehoon Ha
0
0
Skill discovery methods enable agents to learn diverse emergent behaviors without explicit rewards. To make learned skills useful for unknown downstream tasks, obtaining a semantically diverse repertoire of skills is essential. While some approaches introduce a discriminator to distinguish skills and others aim to increase state coverage, no existing work directly addresses the semantic diversity of skills. We hypothesize that leveraging the semantic knowledge of large language models (LLMs) can lead us to improve semantic diversity of resulting behaviors. In this sense, we introduce Language Guided Skill Discovery (LGSD), a skill discovery framework that aims to directly maximize the semantic diversity between skills. LGSD takes user prompts as input and outputs a set of semantically distinctive skills. The prompts serve as a means to constrain the search space into a semantically desired subspace, and the generated LLM outputs guide the agent to visit semantically diverse states within the subspace. We demonstrate that LGSD enables legged robots to visit different user-intended areas on a plane by simply changing the prompt. Furthermore, we show that language guidance aids in discovering more diverse skills compared to five existing skill discovery methods in robot-arm manipulation environments. Lastly, LGSD provides a simple way of utilizing learned skills via natural language.
6/12/2024
New!Lifelong Robot Library Learning: Bootstrapping Composable and Generalizable Skills for Embodied Control with Language Models
Georgios Tziafas, Hamidreza Kasaei
0
0
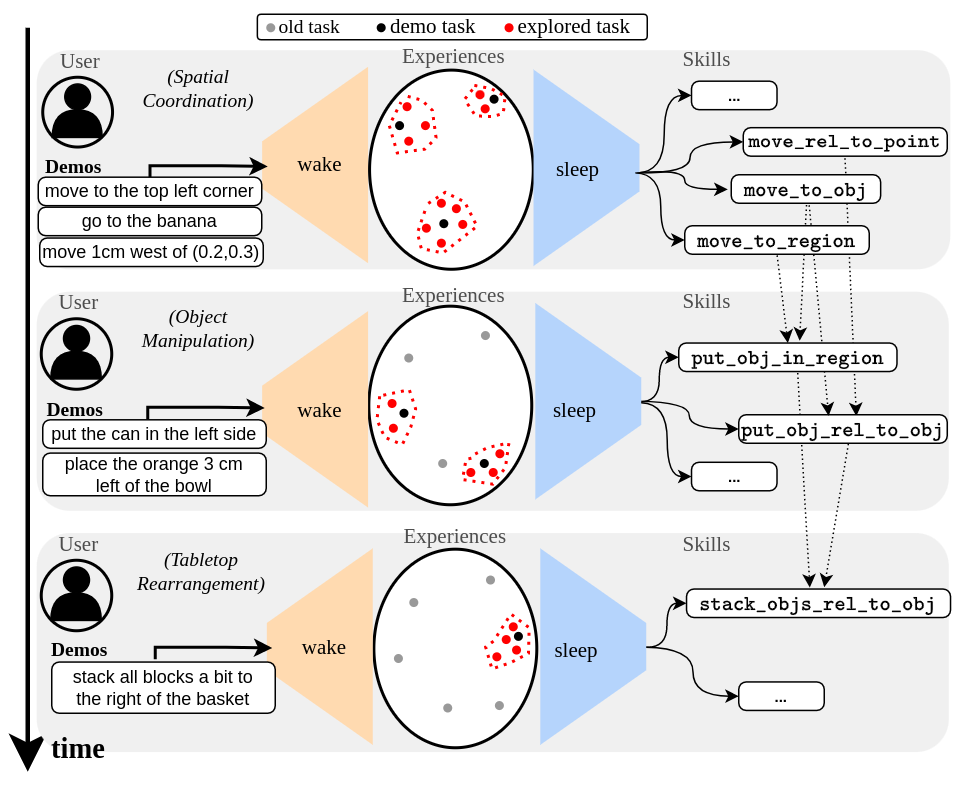
Large Language Models (LLMs) have emerged as a new paradigm for embodied reasoning and control, most recently by generating robot policy code that utilizes a custom library of vision and control primitive skills. However, prior arts fix their skills library and steer the LLM with carefully hand-crafted prompt engineering, limiting the agent to a stationary range of addressable tasks. In this work, we introduce LRLL, an LLM-based lifelong learning agent that continuously grows the robot skill library to tackle manipulation tasks of ever-growing complexity. LRLL achieves this with four novel contributions: 1) a soft memory module that allows dynamic storage and retrieval of past experiences to serve as context, 2) a self-guided exploration policy that proposes new tasks in simulation, 3) a skill abstractor that distills recent experiences into new library skills, and 4) a lifelong learning algorithm for enabling human users to bootstrap new skills with minimal online interaction. LRLL continuously transfers knowledge from the memory to the library, building composable, general and interpretable policies, while bypassing gradient-based optimization, thus relieving the learner from catastrophic forgetting. Empirical evaluation in a simulated tabletop environment shows that LRLL outperforms end-to-end and vanilla LLM approaches in the lifelong setup while learning skills that are transferable to the real world. Project material will become available at the webpage https://gtziafas.github.io/LRLL_project.
6/28/2024
Language-guided Skill Learning with Temporal Variational Inference
Haotian Fu, Pratyusha Sharma, Elias Stengel-Eskin, George Konidaris, Nicolas Le Roux, Marc-Alexandre C^ot'e, Xingdi Yuan
0
0
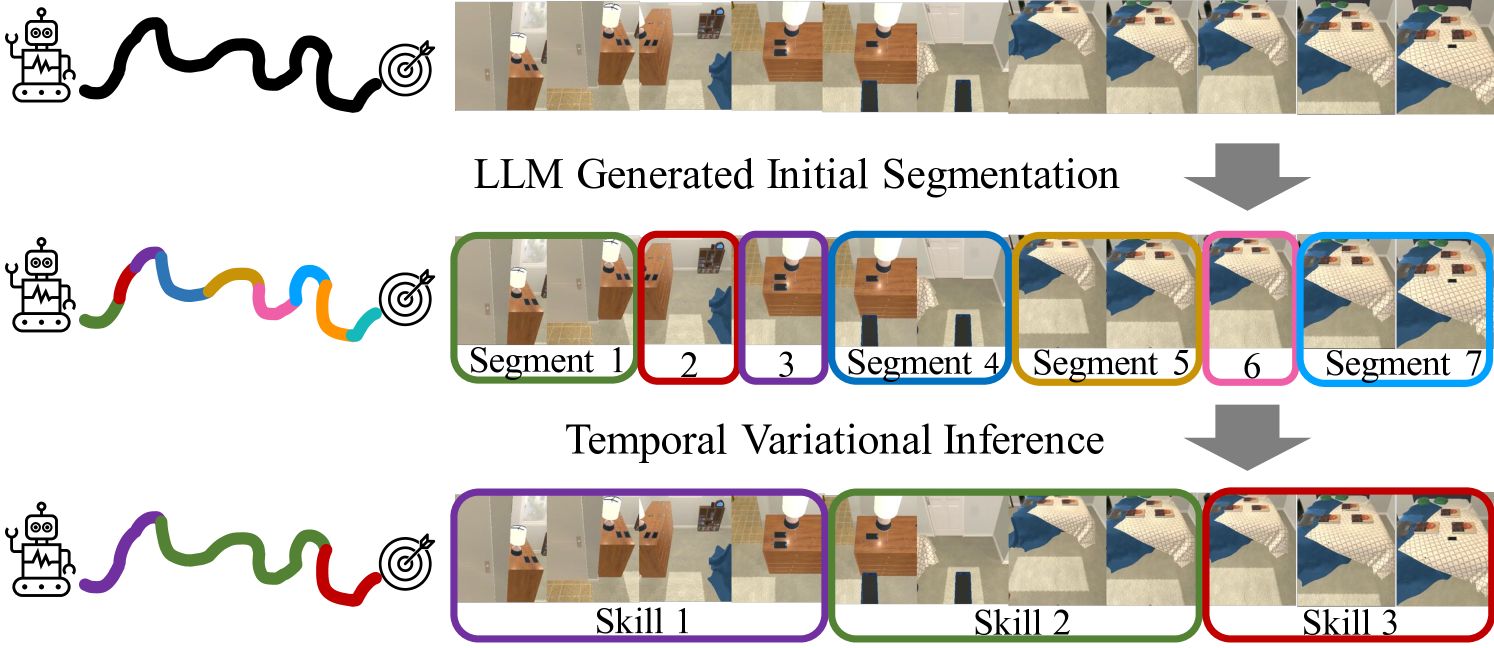
We present an algorithm for skill discovery from expert demonstrations. The algorithm first utilizes Large Language Models (LLMs) to propose an initial segmentation of the trajectories. Following that, a hierarchical variational inference framework incorporates the LLM-generated segmentation information to discover reusable skills by merging trajectory segments. To further control the trade-off between compression and reusability, we introduce a novel auxiliary objective based on the Minimum Description Length principle that helps guide this skill discovery process. Our results demonstrate that agents equipped with our method are able to discover skills that help accelerate learning and outperform baseline skill learning approaches on new long-horizon tasks in BabyAI, a grid world navigation environment, as well as ALFRED, a household simulation environment.
5/28/2024
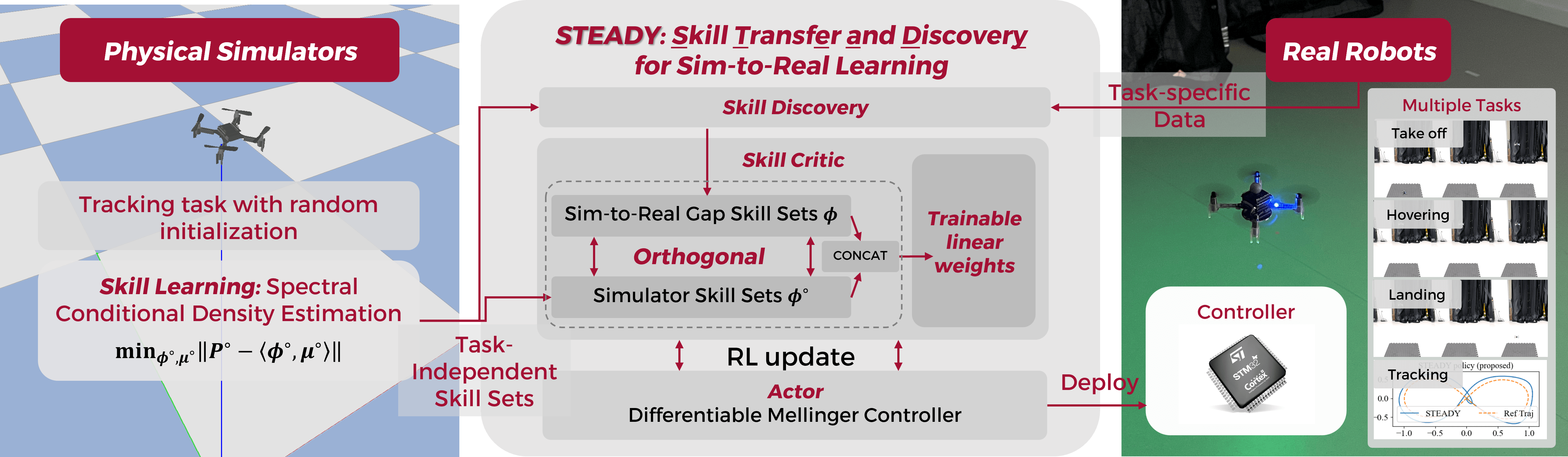
Skill Transfer and Discovery for Sim-to-Real Learning: A Representation-Based Viewpoint
Haitong Ma, Zhaolin Ren, Bo Dai, Na Li
0
0
We study sim-to-real skill transfer and discovery in the context of robotics control using representation learning. We draw inspiration from spectral decomposition of Markov decision processes. The spectral decomposition brings about representation that can linearly represent the state-action value function induced by any policies, thus can be regarded as skills. The skill representations are transferable across arbitrary tasks with the same transition dynamics. Moreover, to handle the sim-to-real gap in the dynamics, we propose a skill discovery algorithm that learns new skills caused by the sim-to-real gap from real-world data. We promote the discovery of new skills by enforcing orthogonal constraints between the skills to learn and the skills from simulators, and then synthesize the policy using the enlarged skill sets. We demonstrate our methodology by transferring quadrotor controllers from simulators to Crazyflie 2.1 quadrotors. We show that we can learn the skill representations from a single simulator task and transfer these to multiple different real-world tasks including hovering, taking off, landing and trajectory tracking. Our skill discovery approach helps narrow the sim-to-real gap and improve the real-world controller performance by up to 30.2%.
4/9/2024