Learning Object States from Actions via Large Language Models
2405.01090
0
0

Abstract
Temporally localizing the presence of object states in videos is crucial in understanding human activities beyond actions and objects. This task has suffered from a lack of training data due to object states' inherent ambiguity and variety. To avoid exhaustive annotation, learning from transcribed narrations in instructional videos would be intriguing. However, object states are less described in narrations compared to actions, making them less effective. In this work, we propose to extract the object state information from action information included in narrations, using large language models (LLMs). Our observation is that LLMs include world knowledge on the relationship between actions and their resulting object states, and can infer the presence of object states from past action sequences. The proposed LLM-based framework offers flexibility to generate plausible pseudo-object state labels against arbitrary categories. We evaluate our method with our newly collected Multiple Object States Transition (MOST) dataset including dense temporal annotation of 60 object state categories. Our model trained by the generated pseudo-labels demonstrates significant improvement of over 29% in mAP against strong zero-shot vision-language models, showing the effectiveness of explicitly extracting object state information from actions through LLMs.
Create account to get full access
Overview
- This paper explores using large language models (LLMs) to learn about object states from action descriptions in narrated videos.
- The researchers propose a method to extract information about object states and changes from the natural language descriptions of actions, without requiring explicit labeling of object states.
- The goal is to enable AI systems to build rich representations of the world by learning about object states and their changes from language, without needing costly manual annotations.
Plain English Explanation
The paper is about using powerful language models, called large language models (LLMs), to learn about the states of objects and how they change over time. The researchers looked at videos where people narrated or described what was happening, and they were able to extract information about the states of objects just from the language alone, without needing explicit labels or annotations.
For example, if a video showed someone opening a door, the language model could learn that the door was in a "closed" state before the action, and then transitioned to an "open" state afterwards. By analyzing many such narrated videos, the model can build up a rich understanding of different object states and how they change based on the actions performed.
This is important because it allows AI systems to learn about the world in a more natural way, by leveraging the vast amount of language data available online and in videos, rather than relying on costly manual labeling of object states. If an AI system can understand how objects change state through language alone, it can build much more comprehensive representations of the world around it.
Technical Explanation
The researchers propose a method to extract information about object states and state changes from the natural language descriptions of actions in narrated videos, without requiring explicit labeling of object states. They utilize large language models (LLMs), which are powerful AI models that can understand and generate human language, to learn associations between action descriptions and the underlying object states.
The key idea is to train the LLM on a large corpus of narrated videos, where the model learns to map the language describing the actions to the likely changes in object states. For example, if the language describes "opening a door", the model can infer that the door transitioned from a "closed" state to an "open" state.
By analyzing many such action-state associations, the model can build up a rich representation of different object states and how they evolve over time through the execution of various actions. This learned knowledge can then be applied to reason about object states in new, unseen situations.
The researchers evaluate their approach on several benchmark datasets and show that the LLM-based method can effectively learn object state representations and outperform other techniques that require explicit object state labeling.
Critical Analysis
The proposed approach is an ingenious way to leverage the vast amount of language data available online to learn about the world in a more natural and scalable way. By using large language models to extract object state information from action descriptions, the system can build rich representations of the world without relying on costly manual annotations.
However, the paper does note some limitations of the current approach. For instance, the language models may struggle with ambiguous or metaphorical language, and the learned representations may not capture all the nuances and complexities of real-world object states. Additionally, the method relies on the availability of narrated video data, which may not be readily accessible for all domains of interest.
Further research could explore ways to make the object state learning more robust to linguistic variation, as well as investigate techniques to integrate the learned representations with other modalities, such as visual perception, to build even more comprehensive world models. [link to https://aimodels.fyi/papers/arxiv/llm-state-open-world-state-representation-long]
Another area for exploration is the application of these methods to learning about the states of abstract concepts or processes, beyond just physical objects. [link to https://aimodels.fyi/papers/arxiv/learning-object-state-changes-videos-open-world]
Overall, the paper presents an innovative approach that demonstrates the potential of large language models to serve as a powerful tool for learning about the world in a more natural and scalable way. As the field of AI continues to advance, techniques like this could play a crucial role in enabling AI systems to build richer and more comprehensive representations of the world around them.
Conclusion
This paper explores a novel approach to learning about object states and their changes from the natural language descriptions of actions in narrated videos, using large language models (LLMs). By leveraging the wealth of language data available online, the researchers show that LLMs can effectively extract information about object states and state transitions, without requiring costly manual annotations.
This work represents an important step towards enabling AI systems to build more comprehensive and realistic representations of the world, by learning about object states and their dynamics in a more natural and scalable way. As the field of AI continues to advance, techniques like this could have far-reaching implications for a wide range of applications, from robotics and autonomous systems to natural language understanding and beyond.
[link to https://aimodels.fyi/papers/arxiv/oscar-object-state-captioning-state-change-representation] [link to https://aimodels.fyi/papers/arxiv/action-contextualization-adaptive-task-planning-action-tuning] [link to https://aimodels.fyi/papers/arxiv/learning-state-invariant-representations-objects-from-image]
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

LLM-State: Open World State Representation for Long-horizon Task Planning with Large Language Model
Siwei Chen, Anxing Xiao, David Hsu
0
0
This work addresses the problem of long-horizon task planning with the Large Language Model (LLM) in an open-world household environment. Existing works fail to explicitly track key objects and attributes, leading to erroneous decisions in long-horizon tasks, or rely on highly engineered state features and feedback, which is not generalizable. We propose an open state representation that provides continuous expansion and updating of object attributes from the LLM's inherent capabilities for context understanding and historical action reasoning. Our proposed representation maintains a comprehensive record of an object's attributes and changes, enabling robust retrospective summary of the sequence of actions leading to the current state. This allows continuously updating world model to enhance context understanding for decision-making in task planning. We validate our model through experiments across simulated and real-world task planning scenarios, demonstrating significant improvements over baseline methods in a variety of tasks requiring long-horizon state tracking and reasoning. (Videofootnote{Video demonstration: url{https://youtu.be/QkN-8pxV3Mo}.})
4/23/2024
Details Make a Difference: Object State-Sensitive Neurorobotic Task Planning
Xiaowen Sun, Xufeng Zhao, Jae Hee Lee, Wenhao Lu, Matthias Kerzel, Stefan Wermter
0
0
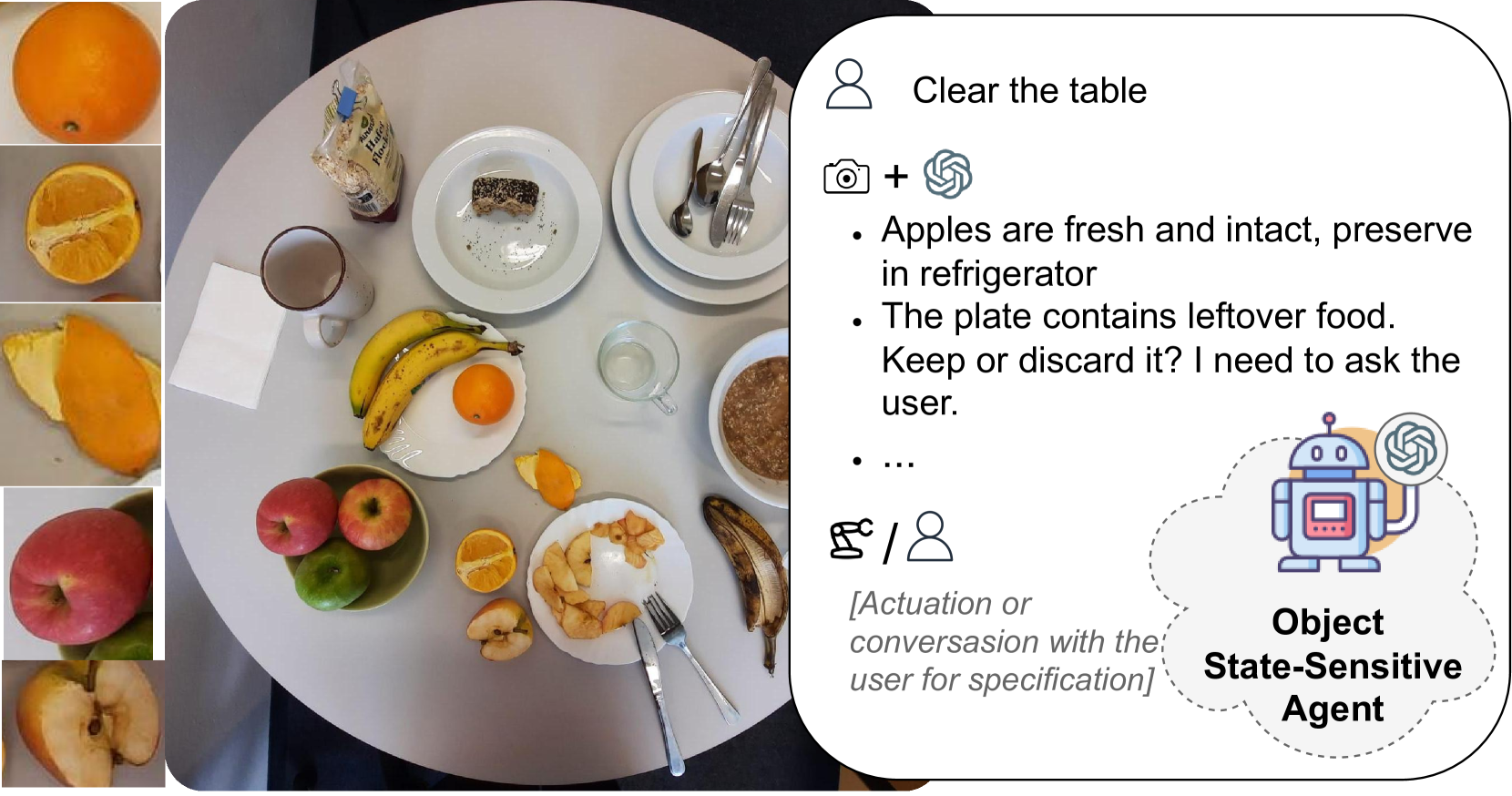
The state of an object reflects its current status or condition and is important for a robot's task planning and manipulation. However, detecting an object's state and generating a state-sensitive plan for robots is challenging. Recently, pre-trained Large Language Models (LLMs) and Vision-Language Models (VLMs) have shown impressive capabilities in generating plans. However, to the best of our knowledge, there is hardly any investigation on whether LLMs or VLMs can also generate object state-sensitive plans. To study this, we introduce an Object State-Sensitive Agent (OSSA), a task-planning agent empowered by pre-trained neural networks. We propose two methods for OSSA: (i) a modular model consisting of a pre-trained vision processing module (dense captioning model, DCM) and a natural language processing model (LLM), and (ii) a monolithic model consisting only of a VLM. To quantitatively evaluate the performances of the two methods, we use tabletop scenarios where the task is to clear the table. We contribute a multimodal benchmark dataset that takes object states into consideration. Our results show that both methods can be used for object state-sensitive tasks, but the monolithic approach outperforms the modular approach. The code for OSSA is available at url{https://github.com/Xiao-wen-Sun/OSSA}
6/17/2024
🎲
Anticipating Object State Changes
Victoria Manousaki, Konstantinos Bacharidis, Filippos Gouidis, Konstantinos Papoutsakis, Dimitris Plexousakis, Antonis Argyros
0
0
Anticipating object state changes in images and videos is a challenging problem whose solution has important implications in vision-based scene understanding, automated monitoring systems, and action planning. In this work, we propose the first method for solving this problem. The proposed method predicts object state changes that will occur in the near future as a result of yet unseen human actions. To address this new problem, we propose a novel framework that integrates learnt visual features that represent the recent visual information, with natural language (NLP) features that represent past object state changes and actions. Leveraging the extensive and challenging Ego4D dataset which provides a large-scale collection of first-person perspective videos across numerous interaction scenarios, we introduce new curated annotation data for the object state change anticipation task (OSCA), noted as Ego4D-OSCA. An extensive experimental evaluation was conducted that demonstrates the efficacy of the proposed method in predicting object state changes in dynamic scenarios. The proposed work underscores the potential of integrating video and linguistic cues to enhance the predictive performance of video understanding systems. Moreover, it lays the groundwork for future research on the new task of object state change anticipation. The source code and the new annotation data (Ego4D-OSCA) will be made publicly available.
5/22/2024

Learning Object State Changes in Videos: An Open-World Perspective
Zihui Xue, Kumar Ashutosh, Kristen Grauman
0
0
Object State Changes (OSCs) are pivotal for video understanding. While humans can effortlessly generalize OSC understanding from familiar to unknown objects, current approaches are confined to a closed vocabulary. Addressing this gap, we introduce a novel open-world formulation for the video OSC problem. The goal is to temporally localize the three stages of an OSC -- the object's initial state, its transitioning state, and its end state -- whether or not the object has been observed during training. Towards this end, we develop VidOSC, a holistic learning approach that: (1) leverages text and vision-language models for supervisory signals to obviate manually labeling OSC training data, and (2) abstracts fine-grained shared state representations from objects to enhance generalization. Furthermore, we present HowToChange, the first open-world benchmark for video OSC localization, which offers an order of magnitude increase in the label space and annotation volume compared to the best existing benchmark. Experimental results demonstrate the efficacy of our approach, in both traditional closed-world and open-world scenarios.
4/4/2024