LLM-State: Open World State Representation for Long-horizon Task Planning with Large Language Model
2311.17406
0
0

Abstract
This work addresses the problem of long-horizon task planning with the Large Language Model (LLM) in an open-world household environment. Existing works fail to explicitly track key objects and attributes, leading to erroneous decisions in long-horizon tasks, or rely on highly engineered state features and feedback, which is not generalizable. We propose an open state representation that provides continuous expansion and updating of object attributes from the LLM's inherent capabilities for context understanding and historical action reasoning. Our proposed representation maintains a comprehensive record of an object's attributes and changes, enabling robust retrospective summary of the sequence of actions leading to the current state. This allows continuously updating world model to enhance context understanding for decision-making in task planning. We validate our model through experiments across simulated and real-world task planning scenarios, demonstrating significant improvements over baseline methods in a variety of tasks requiring long-horizon state tracking and reasoning. (Videofootnote{Video demonstration: url{https://youtu.be/QkN-8pxV3Mo}.})
Create account to get full access
Overview
- This paper presents a new method called LLM-State for representing the state of an agent in long-horizon task planning for open-world environments.
- The key idea is to use a large language model (LLM) to dynamically expand the state representation as needed, allowing the agent to reason about and plan for complex, open-ended scenarios.
- The authors demonstrate the effectiveness of LLM-State on several challenging robotic manipulation and navigation tasks, showing significant improvements over traditional state representation methods.
Plain English Explanation
The paper is about a new way for artificial intelligence (AI) systems to represent the world around them when trying to solve complex, long-term tasks. Typically, AI systems have a fixed way of representing the state of the world, which can limit their ability to handle unexpected or open-ended situations.
The researchers in this paper developed a method called LLM-State that uses a large language model (a type of AI that is good at understanding and generating human language) to dynamically expand the system's understanding of the world as needed. This allows the AI to reason about and plan for a much wider range of possibilities, rather than being restricted to a pre-defined set of states.
The researchers tested LLM-State on challenging robotic tasks, such as manipulating objects and navigating through complex environments. They found that LLM-State significantly outperformed traditional state representation methods, showing the power of this flexible, language-based approach to understanding the world.
The key innovation here is using language models, which are powerful at capturing the richness and ambiguity of the real world, to give AI systems a more adaptable and expansive view of their environment. This can be especially useful for long-horizon task planning in the open world, where agents need to reason about a wide range of possible scenarios and events over an extended period of time.
Technical Explanation
The core idea of LLM-State is to use a large language model (LLM) to dynamically represent the state of the agent's environment. Unlike traditional state representation methods that use a fixed set of features, LLM-State can expand the state representation as needed to reason about complex, open-ended scenarios.
The authors leverage the powerful language understanding capabilities of LLMs to capture rich, contextual information about the agent's surroundings. When the agent encounters a new situation, the LLM can be used to generate a detailed description of the relevant state elements, which are then incorporated into the overall state representation.
This flexible, language-based approach to state representation enables the agent to reason about a much broader range of possibilities compared to fixed-size state spaces. The authors demonstrate the effectiveness of LLM-State on several challenging robotic manipulation and navigation tasks, showing significant improvements over traditional methods like MLDT and DELTA.
The authors also explore the use of LLM-State in the context of large language models as generalizable policies for embodied agents, demonstrating its potential to enable more adaptive task planning and action tuning in open-world environments.
Critical Analysis
The paper presents a compelling approach to state representation for long-horizon task planning, but there are a few caveats to consider:
-
Computational efficiency: While the flexibility of LLM-State is a strength, the computational overhead of querying a large language model at every step of the planning process could be a limiting factor, especially for real-time applications.
-
Robustness and reliability: The authors note that LLM-based state representations may be susceptible to language model biases and errors. Further research is needed to ensure the reliability and consistency of the state information generated by the LLM.
-
Interpretability and explainability: The use of a black-box language model to represent the agent's state could make it challenging to understand and explain the reasoning behind the agent's decisions. Techniques for improving the interpretability of LLM-State would be a valuable area of future research.
Despite these potential limitations, the core idea of using language models to dynamically expand state representations is a promising direction for long-horizon task planning in open-world environments. The authors have demonstrated the effectiveness of this approach on several challenging robotic tasks, and further research in this area could lead to significant advancements in the field of embodied AI.
Conclusion
The LLM-State method presented in this paper offers a novel approach to state representation for long-horizon task planning in open-world environments. By leveraging the rich, contextual understanding of large language models, the agent can dynamically expand its representation of the world as needed, enabling more flexible and adaptive reasoning about complex, open-ended scenarios.
The authors' empirical results on robotic manipulation and navigation tasks highlight the significant performance improvements that can be achieved with this language-based state representation approach, compared to traditional methods. While there are some challenges to address, such as computational efficiency and interpretability, the core ideas behind LLM-State represent an exciting direction for the future of embodied AI systems operating in the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
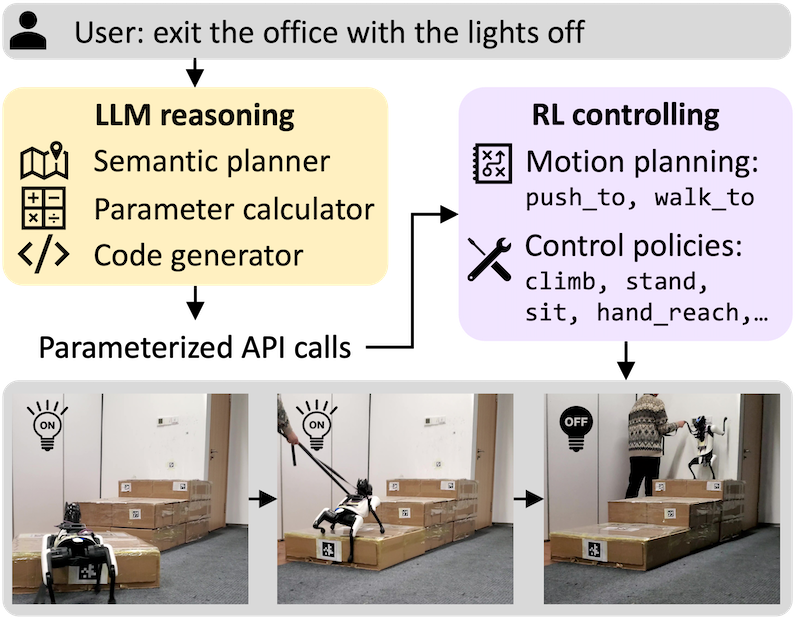
Long-horizon Locomotion and Manipulation on a Quadrupedal Robot with Large Language Models
Yutao Ouyang, Jinhan Li, Yunfei Li, Zhongyu Li, Chao Yu, Koushil Sreenath, Yi Wu
0
0
We present a large language model (LLM) based system to empower quadrupedal robots with problem-solving abilities for long-horizon tasks beyond short-term motions. Long-horizon tasks for quadrupeds are challenging since they require both a high-level understanding of the semantics of the problem for task planning and a broad range of locomotion and manipulation skills to interact with the environment. Our system builds a high-level reasoning layer with large language models, which generates hybrid discrete-continuous plans as robot code from task descriptions. It comprises multiple LLM agents: a semantic planner for sketching a plan, a parameter calculator for predicting arguments in the plan, and a code generator to convert the plan into executable robot code. At the low level, we adopt reinforcement learning to train a set of motion planning and control skills to unleash the flexibility of quadrupeds for rich environment interactions. Our system is tested on long-horizon tasks that are infeasible to complete with one single skill. Simulation and real-world experiments show that it successfully figures out multi-step strategies and demonstrates non-trivial behaviors, including building tools or notifying a human for help.
4/9/2024

Towards Open-World Grasping with Large Vision-Language Models
Georgios Tziafas, Hamidreza Kasaei
0
0
The ability to grasp objects in-the-wild from open-ended language instructions constitutes a fundamental challenge in robotics. An open-world grasping system should be able to combine high-level contextual with low-level physical-geometric reasoning in order to be applicable in arbitrary scenarios. Recent works exploit the web-scale knowledge inherent in large language models (LLMs) to plan and reason in robotic context, but rely on external vision and action models to ground such knowledge into the environment and parameterize actuation. This setup suffers from two major bottlenecks: a) the LLM's reasoning capacity is constrained by the quality of visual grounding, and b) LLMs do not contain low-level spatial understanding of the world, which is essential for grasping in contact-rich scenarios. In this work we demonstrate that modern vision-language models (VLMs) are capable of tackling such limitations, as they are implicitly grounded and can jointly reason about semantics and geometry. We propose OWG, an open-world grasping pipeline that combines VLMs with segmentation and grasp synthesis models to unlock grounded world understanding in three stages: open-ended referring segmentation, grounded grasp planning and grasp ranking via contact reasoning, all of which can be applied zero-shot via suitable visual prompting mechanisms. We conduct extensive evaluation in cluttered indoor scene datasets to showcase OWG's robustness in grounding from open-ended language, as well as open-world robotic grasping experiments in both simulation and hardware that demonstrate superior performance compared to previous supervised and zero-shot LLM-based methods.
6/28/2024
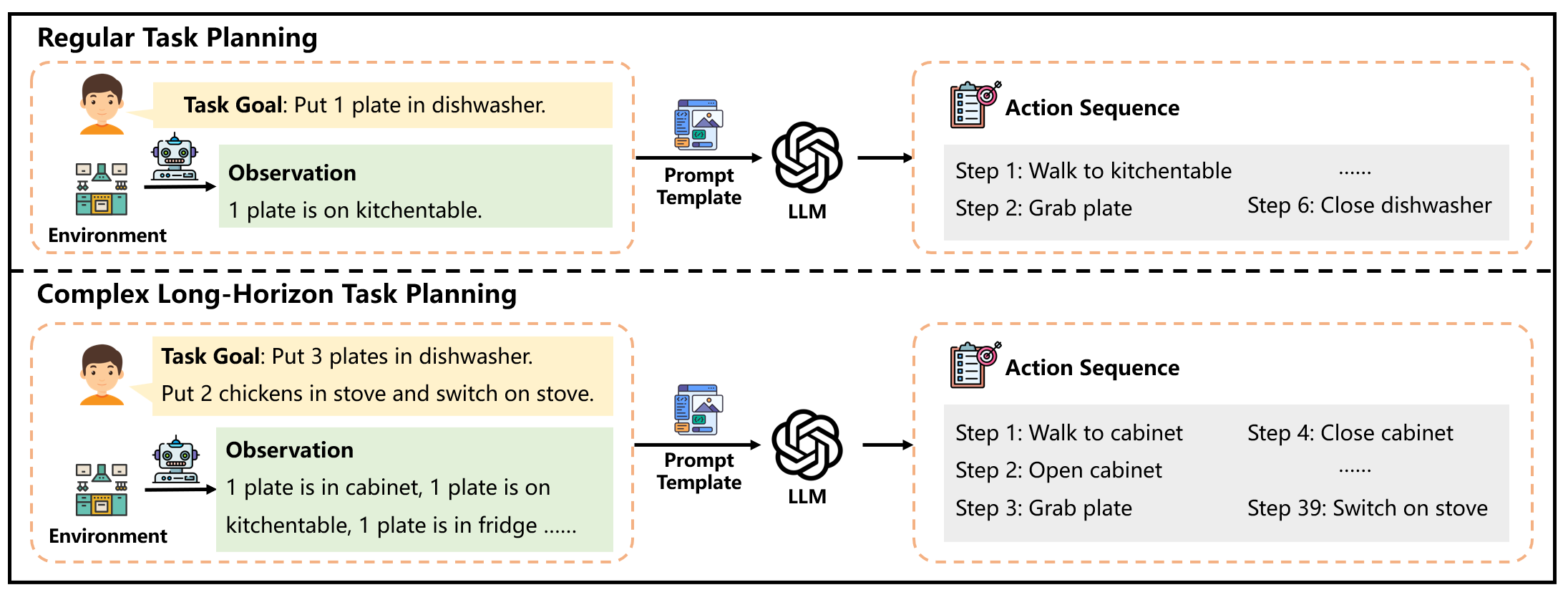
MLDT: Multi-Level Decomposition for Complex Long-Horizon Robotic Task Planning with Open-Source Large Language Model
Yike Wu, Jiatao Zhang, Nan Hu, LanLing Tang, Guilin Qi, Jun Shao, Jie Ren, Wei Song
0
0
In the realm of data-driven AI technology, the application of open-source large language models (LLMs) in robotic task planning represents a significant milestone. Recent robotic task planning methods based on open-source LLMs typically leverage vast task planning datasets to enhance models' planning abilities. While these methods show promise, they struggle with complex long-horizon tasks, which require comprehending more context and generating longer action sequences. This paper addresses this limitation by proposing MLDT, theMulti-Level Decomposition Task planning method. This method innovatively decomposes tasks at the goal-level, task-level, and action-level to mitigate the challenge of complex long-horizon tasks. In order to enhance open-source LLMs' planning abilities, we introduce a goal-sensitive corpus generation method to create high-quality training data and conduct instruction tuning on the generated corpus. Since the complexity of the existing datasets is not high enough, we construct a more challenging dataset, LongTasks, to specifically evaluate planning ability on complex long-horizon tasks. We evaluate our method using various LLMs on four datasets in VirtualHome. Our results demonstrate a significant performance enhancement in robotic task planning, showcasing MLDT's effectiveness in overcoming the limitations of existing methods based on open-source LLMs as well as its practicality in complex, real-world scenarios.
4/3/2024

Learning Object States from Actions via Large Language Models
Masatoshi Tateno, Takuma Yagi, Ryosuke Furuta, Yoichi Sato
0
0
Temporally localizing the presence of object states in videos is crucial in understanding human activities beyond actions and objects. This task has suffered from a lack of training data due to object states' inherent ambiguity and variety. To avoid exhaustive annotation, learning from transcribed narrations in instructional videos would be intriguing. However, object states are less described in narrations compared to actions, making them less effective. In this work, we propose to extract the object state information from action information included in narrations, using large language models (LLMs). Our observation is that LLMs include world knowledge on the relationship between actions and their resulting object states, and can infer the presence of object states from past action sequences. The proposed LLM-based framework offers flexibility to generate plausible pseudo-object state labels against arbitrary categories. We evaluate our method with our newly collected Multiple Object States Transition (MOST) dataset including dense temporal annotation of 60 object state categories. Our model trained by the generated pseudo-labels demonstrates significant improvement of over 29% in mAP against strong zero-shot vision-language models, showing the effectiveness of explicitly extracting object state information from actions through LLMs.
5/3/2024