Learning Variable Compliance Control From a Few Demonstrations for Bimanual Robot with Haptic Feedback Teleoperation System

0

Sign in to get full access
Overview
- This paper presents a method for learning variable compliance control from a few demonstrations for a bimanual robot with a haptic feedback teleoperation system.
- The key idea is to use a demonstration-based approach to learn a model that can adapt the robot's compliance based on the task and environment, allowing for more dexterous and safe manipulation.
- The method is evaluated through experiments on a real bimanual robot platform, demonstrating improved performance compared to fixed-compliance control.
Plain English Explanation
The research in this paper aims to enable robots to better adapt their behavior to different tasks and environments. Specifically, the researchers developed a way for robots to learn how to adjust their "compliance" or flexibility based on just a few demonstrations by a human operator.
Compliance is an important aspect of robot control, as it allows the robot to be more gentle and dexterous when interacting with delicate objects or navigating tight spaces. However, choosing the right compliance setting can be challenging, as it depends on the specific task and environment.
The researchers' approach allows the robot to learn an adaptive compliance model from a human demonstrating the desired behavior. This model can then be used by the robot to automatically adjust its compliance on the fly, without needing to be manually programmed for each new situation.
The key innovation is the use of a "haptic feedback" teleoperation system, which allows the human operator to physically feel the forces and interactions the robot is experiencing. This provides rich sensory information that helps the robot learn a more accurate model of the task requirements.
Through experiments on a real bimanual (two-armed) robot platform, the researchers show that this approach leads to improved performance compared to using a fixed compliance setting. This suggests it could be a useful technique for enabling more versatile and dexterous robot manipulation capabilities.
Technical Explanation
The paper presents a method for learning variable compliance control from a few demonstrations for a bimanual robot with a haptic feedback teleoperation system.
The core idea is to leverage human demonstration and haptic feedback to learn an adaptive compliance model that can be used by the robot during task execution. This builds on prior work on integrating visuo-tactile sensing and haptic feedback for teleoperated manipulation and robust anthropomorphic robotic manipulation through biomimetic distributed contact sensing.
The proposed approach involves the following key steps:
- The human operator teleoperades the bimanual robot using a haptic interface, providing a few demonstrations of the desired task behavior.
- The robot uses these demonstrations to learn a variable compliance control model, which maps the current state (e.g. forces, object properties) to an appropriate compliance setting.
- During autonomous execution, the robot can then adjust its compliance in real-time based on this learned model, allowing it to better adapt to different task requirements and environments.
The method is evaluated on a real bimanual robot platform, with experiments showing improved performance compared to using a fixed compliance setting. This suggests the approach could be a useful technique for enabling safe haptic teleoperation of admittance-controlled robots through virtualization and learning visuotactile skills for dexterous manipulation with two multifingered hands.
Critical Analysis
The paper presents a promising approach for enabling more adaptive and dexterous robot manipulation capabilities. The use of human demonstration and haptic feedback to learn a variable compliance model is a clever way to capture the nuanced task requirements that are difficult to program manually.
However, the paper does not address some potential limitations of the approach. For example, the reliance on human demonstration may limit the ability to learn more complex or novel behaviors that the human operator cannot easily demonstrate. Additionally, the experiments were conducted on a specific bimanual robot platform, so the generalizability to other robot morphologies or tasks is unclear.
Further research could explore ways to combine the demonstration-based learning with other techniques, such as reinforcement learning or model-based optimization, to expand the range of behaviors that can be learned. Investigations into the sample efficiency and robustness of the approach across different robot platforms and task domains would also be valuable.
Overall, this paper makes an important contribution to the field of adaptive robot manipulation, and the proposed method seems promising for enabling more versatile and dexterous robotic capabilities in the future.
Conclusion
This paper presents a novel approach for learning variable compliance control from a few demonstrations for a bimanual robot with a haptic feedback teleoperation system. The key idea is to leverage human demonstration and haptic feedback to learn an adaptive compliance model that can be used by the robot to adjust its behavior in real-time based on the task and environment.
Experiments on a real bimanual robot platform demonstrate the effectiveness of this approach, with improved performance compared to using a fixed compliance setting. This suggests the method could be a valuable tool for enabling more dexterous and safe robot manipulation capabilities, with potential applications in areas like integrating visuo-tactile sensing and haptic feedback for teleoperated manipulation, robust anthropomorphic robotic manipulation through biomimetic distributed contact sensing, and safe haptic teleoperation of admittance-controlled robots through virtualization.
Further research could explore ways to expand the versatility and robustness of the approach, potentially by integrating it with other learning techniques or evaluating it across a wider range of robot platforms and task domains.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Learning Variable Compliance Control From a Few Demonstrations for Bimanual Robot with Haptic Feedback Teleoperation System
Tatsuya Kamijo, Cristian C. Beltran-Hernandez, Masashi Hamaya
Automating dexterous, contact-rich manipulation tasks using rigid robots is a significant challenge in robotics. Rigid robots, defined by their actuation through position commands, face issues of excessive contact forces due to their inability to adapt to contact with the environment, potentially causing damage. While compliance control schemes have been introduced to mitigate these issues by controlling forces via external sensors, they are hampered by the need for fine-tuning task-specific controller parameters. Learning from Demonstrations (LfD) offers an intuitive alternative, allowing robots to learn manipulations through observed actions. In this work, we introduce a novel system to enhance the teaching of dexterous, contact-rich manipulations to rigid robots. Our system is twofold: firstly, it incorporates a teleoperation interface utilizing Virtual Reality (VR) controllers, designed to provide an intuitive and cost-effective method for task demonstration with haptic feedback. Secondly, we present Comp-ACT (Compliance Control via Action Chunking with Transformers), a method that leverages the demonstrations to learn variable compliance control from a few demonstrations. Our methods have been validated across various complex contact-rich manipulation tasks using single-arm and bimanual robot setups in simulated and real-world environments, demonstrating the effectiveness of our system in teaching robots dexterous manipulations with enhanced adaptability and safety.
Read more6/24/2024

0
New!Haptic-ACT: Bridging Human Intuition with Compliant Robotic Manipulation via Immersive VR
Kelin Li, Shubham M Wagh, Nitish Sharma, Saksham Bhadani, Wei Chen, Chang Liu, Petar Kormushev
Robotic manipulation is essential for the widespread adoption of robots in industrial and home settings and has long been a focus within the robotics community. Advances in artificial intelligence have introduced promising learning-based methods to address this challenge, with imitation learning emerging as particularly effective. However, efficiently acquiring high-quality demonstrations remains a challenge. In this work, we introduce an immersive VR-based teleoperation setup designed to collect demonstrations from a remote human user. We also propose an imitation learning framework called Haptic Action Chunking with Transformers (Haptic-ACT). To evaluate the platform, we conducted a pick-and-place task and collected 50 demonstration episodes. Results indicate that the immersive VR platform significantly reduces demonstrator fingertip forces compared to systems without haptic feedback, enabling more delicate manipulation. Additionally, evaluations of the Haptic-ACT framework in both the MuJoCo simulator and on a real robot demonstrate its effectiveness in teaching robots more compliant manipulation compared to the original ACT. Additional materials are available at https://sites.google.com/view/hapticact.
Read more9/19/2024
0
Learning Force Control for Legged Manipulation
Tifanny Portela, Gabriel B. Margolis, Yandong Ji, Pulkit Agrawal
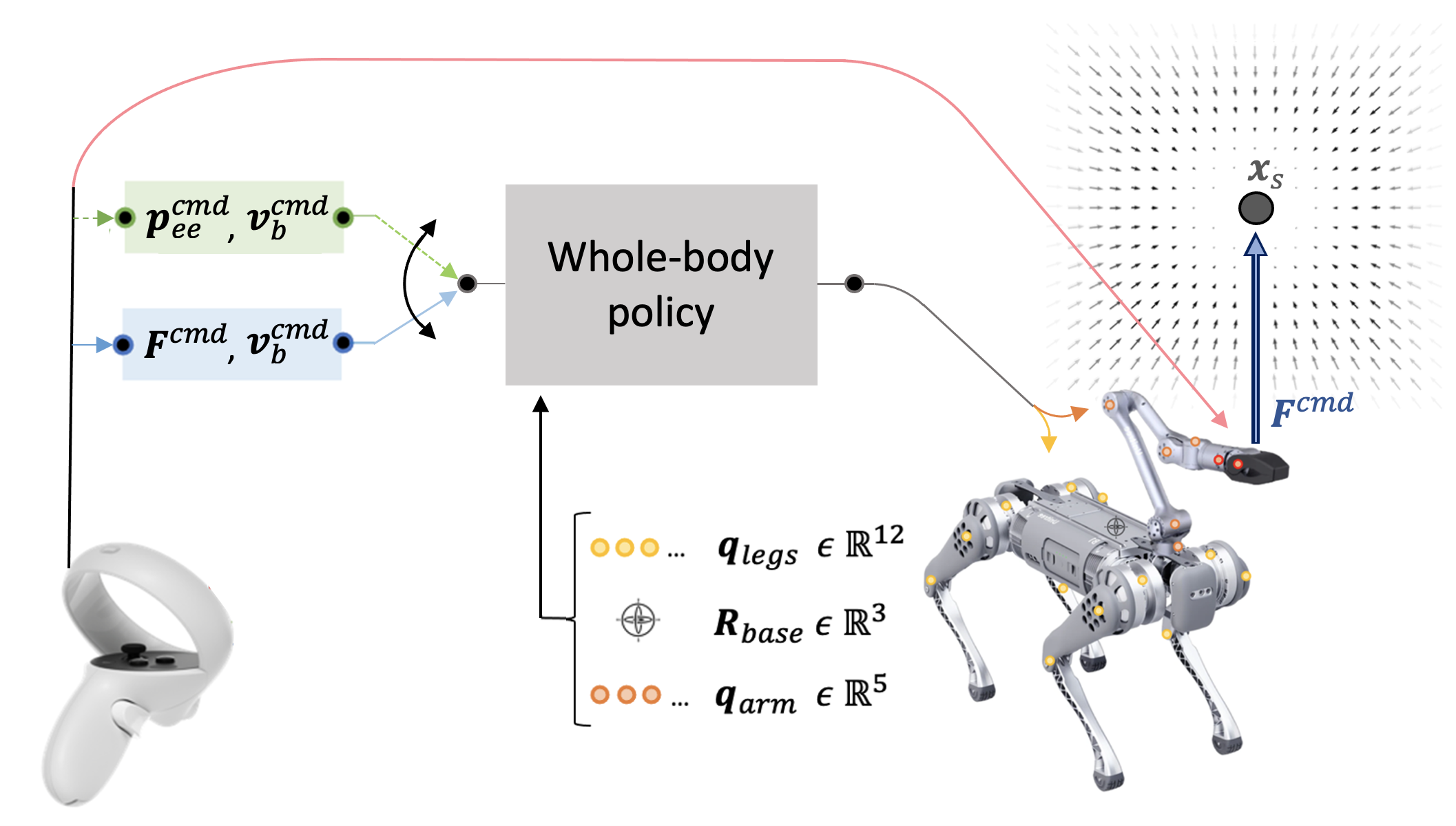
Controlling contact forces during interactions is critical for locomotion and manipulation tasks. While sim-to-real reinforcement learning (RL) has succeeded in many contact-rich problems, current RL methods achieve forceful interactions implicitly without explicitly regulating forces. We propose a method for training RL policies for direct force control without requiring access to force sensing. We showcase our method on a whole-body control platform of a quadruped robot with an arm. Such force control enables us to perform gravity compensation and impedance control, unlocking compliant whole-body manipulation. The learned whole-body controller with variable compliance makes it intuitive for humans to teleoperate the robot by only commanding the manipulator, and the robot's body adjusts automatically to achieve the desired position and force. Consequently, a human teleoperator can easily demonstrate a wide variety of loco-manipulation tasks. To the best of our knowledge, we provide the first deployment of learned whole-body force control in legged manipulators, paving the way for more versatile and adaptable legged robots.
Read more5/21/2024

0
Learning Variable Impedance Skills from Demonstrations with Passivity Guarantee
Yu Zhang, Long Cheng, Xiuze Xia, Haoyu Zhang
Robots are increasingly being deployed not only in workplaces but also in households. Effectively execute of manipulation tasks by robots relies on variable impedance control with contact forces. Furthermore, robots should possess adaptive capabilities to handle the considerable variations exhibited by different robotic tasks in dynamic environments, which can be obtained through human demonstrations. This paper presents a learning-from-demonstration framework that integrates force sensing and motion information to facilitate variable impedance control. The proposed approach involves the estimation of full stiffness matrices from human demonstrations, which are then combined with sensed forces and motion information to create a model using the non-parametric method. This model allows the robot to replicate the demonstrated task while also responding appropriately to new task conditions through the use of the state-dependent stiffness profile. Additionally, a novel tank based variable impedance control approach is proposed to ensure passivity by using the learned stiffness. The proposed approach was evaluated using two virtual variable stiffness systems. The first evaluation demonstrates that the stiffness estimated approach exhibits superior robustness compared to traditional methods when tested on manual datasets, and the second evaluation illustrates that the novel tank based approach is more easily implementable compared to traditional variable impedance control approaches.
Read more7/30/2024