Leveraging Environment Interaction for Automated PDDL Generation and Planning with Large Language Models

0

Sign in to get full access
Overview
- This paper explores using large language models (LLMs) to automatically generate PDDL (Planning Domain Definition Language) and perform planning in simulated environments.
- The authors develop a system that leverages interaction with the environment to learn about actions and their effects, which is then used to generate PDDL domains and solve planning problems.
- The proposed approach aims to simplify the process of creating planning domains and enable more accessible planning capabilities for a wider range of users.
Plain English Explanation
Large language models (LLMs) are powerful AI systems that can understand and generate human-like text. In this research, the authors explore how LLMs can be used to help with planning and decision-making tasks.
Planning is a fundamental problem in artificial intelligence, where an agent (like a robot or a computer program) needs to figure out a sequence of actions to achieve a goal. To do this, the agent typically needs a detailed description of the available actions and their effects, which is often expressed using a language called PDDL (Planning Domain Definition Language).
Traditionally, creating PDDL domains has been a time-consuming and specialized task, requiring significant domain expertise. The key idea in this paper is to use LLMs to automate this process. The researchers develop a system that can interact with simulated environments, learn about the available actions and their consequences, and then use that knowledge to automatically generate PDDL domains.
Once the PDDL domains are created, the system can then use planning algorithms to solve problems, such as figuring out the best sequence of actions to achieve a particular goal. This approach aims to make planning more accessible and easier to use for a wider range of users, without requiring extensive technical expertise.
By leveraging the capabilities of large language models, the researchers hope to pave the way for more widespread adoption of planning technologies in various applications, from robotics and automation to decision-making support systems.
Technical Explanation
The paper presents a novel approach for automated PDDL generation and planning using large language models. The key components of the system are:
-
Environment Interaction: The system interacts with a simulated environment, performing various actions and observing their effects. This interaction allows the system to learn about the available actions and their consequences.
-
PDDL Generation: The system uses the knowledge acquired through environment interaction to generate PDDL domains that accurately capture the dynamics of the environment.
-
Planning: With the generated PDDL domains, the system can then employ classical planning algorithms to solve planning problems, such as finding the optimal sequence of actions to achieve a particular goal.
The authors evaluate their approach on various simulated environments, including a textual environment and a robotic manipulation scenario. The results demonstrate that the system can effectively learn the environment dynamics, generate accurate PDDL domains, and solve complex planning problems.
Critical Analysis
The proposed approach represents a significant step towards making planning more accessible and easier to use. By automating the PDDL generation process, the system can help reduce the barrier to entry for users who may not have extensive planning expertise.
However, the paper also acknowledges some limitations and areas for further research:
-
Environment Complexity: The current system is limited to relatively simple simulated environments. Scaling the approach to more complex, real-world domains may require additional research and advancements.
-
PDDL Accuracy: While the generated PDDL domains were found to be accurate in the evaluated scenarios, there may be cases where the learned models do not fully capture the true dynamics of the environment, potentially leading to planning errors.
-
Generalization: The authors note that the system's ability to generalize to new environments or domains beyond the ones used during training may be an area for further investigation.
Additionally, one could question the reliance on simulated environments for training and evaluation. Applying the approach to real-world planning problems may introduce additional challenges, such as sensing uncertainty, partial observability, and the need for robust interaction with physical systems.
Conclusion
This research demonstrates the potential of leveraging large language models to automate the generation of PDDL domains and enable more accessible planning capabilities. By empowering users to solve planning problems without the need for extensive technical expertise, the proposed system represents an important step towards democratizing planning technologies.
While the current approach has some limitations, the authors have laid the groundwork for future research to address these challenges and further expand the applicability of this approach. As large language models continue to advance, the integration of planning capabilities could lead to significant advancements in a wide range of domains, from robotics and automation to decision-support systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Leveraging Environment Interaction for Automated PDDL Generation and Planning with Large Language Models
Sadegh Mahdavi, Raquel Aoki, Keyi Tang, Yanshuai Cao
Large Language Models (LLMs) have shown remarkable performance in various natural language tasks, but they often struggle with planning problems that require structured reasoning. To address this limitation, the conversion of planning problems into the Planning Domain Definition Language (PDDL) has been proposed as a potential solution, enabling the use of automated planners. However, generating accurate PDDL files typically demands human inputs or correction, which can be time-consuming and costly. In this paper, we propose a novel approach that leverages LLMs and environment feedback to automatically generate PDDL domain and problem description files without the need for human intervention. Our method introduces an iterative refinement process that generates multiple problem PDDL candidates and progressively refines the domain PDDL based on feedback obtained from interacting with the environment. To guide the refinement process, we develop an Exploration Walk (EW) metric, which provides rich feedback signals for LLMs to update the PDDL file. We evaluate our approach on PDDL environments. We achieve an average task solve rate of 66% compared to a 29% solve rate by GPT-4's intrinsic planning with chain-of-thought prompting. Our work enables the automated modeling of planning environments using LLMs and environment feedback, eliminating the need for human intervention in the PDDL generation process and paving the way for more reliable LLM agents in challenging problems.
Read more7/19/2024
💬
0
Large Language Models as Planning Domain Generators
James Oswald, Kavitha Srinivas, Harsha Kokel, Junkyu Lee, Michael Katz, Shirin Sohrabi
Developing domain models is one of the few remaining places that require manual human labor in AI planning. Thus, in order to make planning more accessible, it is desirable to automate the process of domain model generation. To this end, we investigate if large language models (LLMs) can be used to generate planning domain models from simple textual descriptions. Specifically, we introduce a framework for automated evaluation of LLM-generated domains by comparing the sets of plans for domain instances. Finally, we perform an empirical analysis of 7 large language models, including coding and chat models across 9 different planning domains, and under three classes of natural language domain descriptions. Our results indicate that LLMs, particularly those with high parameter counts, exhibit a moderate level of proficiency in generating correct planning domains from natural language descriptions. Our code is available at https://github.com/IBM/NL2PDDL.
Read more5/14/2024
0
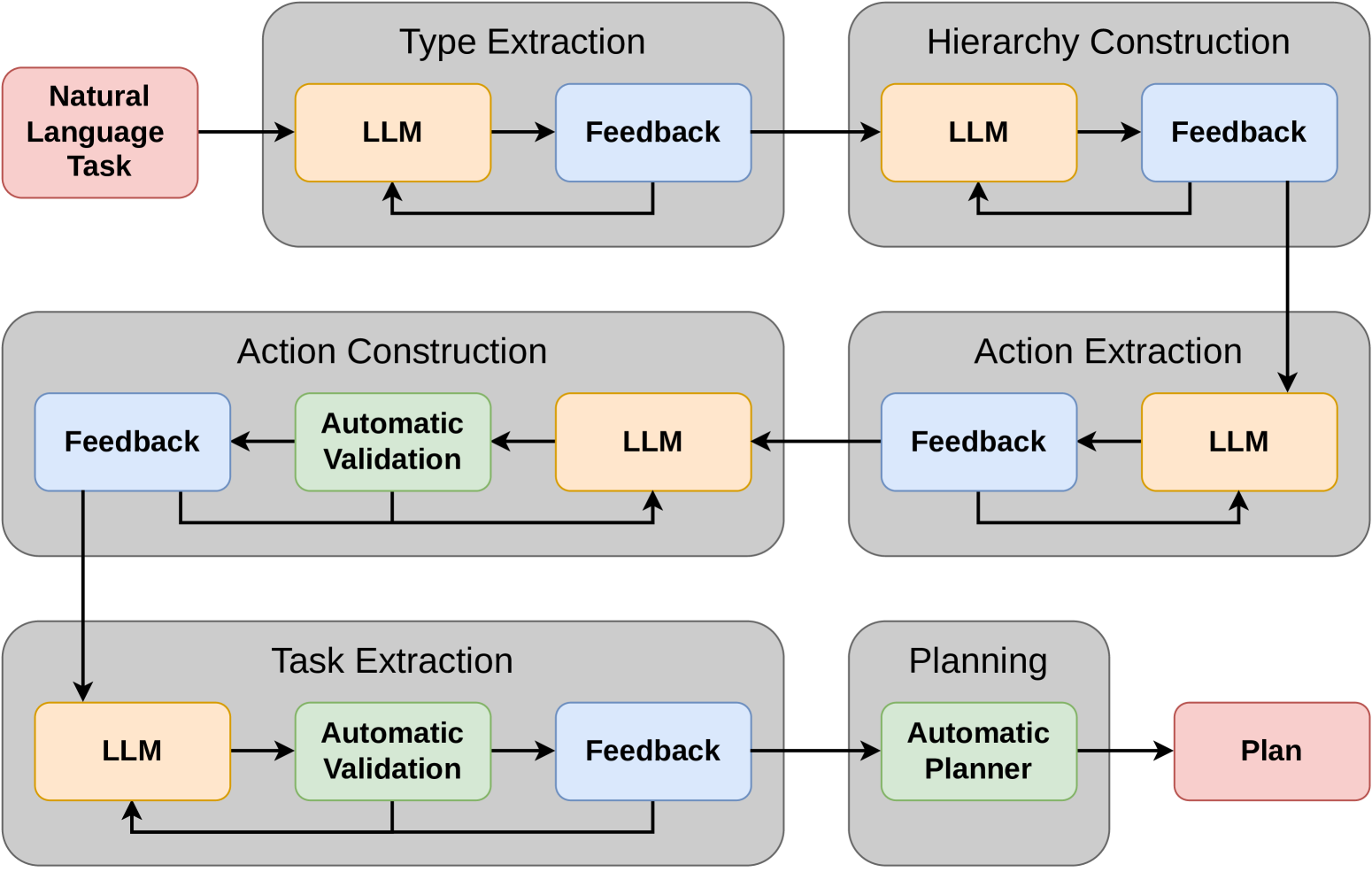
NL2Plan: Robust LLM-Driven Planning from Minimal Text Descriptions
Elliot Gestrin, Marco Kuhlmann, Jendrik Seipp
Today's classical planners are powerful, but modeling input tasks in formats such as PDDL is tedious and error-prone. In contrast, planning with Large Language Models (LLMs) allows for almost any input text, but offers no guarantees on plan quality or even soundness. In an attempt to merge the best of these two approaches, some work has begun to use LLMs to automate parts of the PDDL creation process. However, these methods still require various degrees of expert input. We present NL2Plan, the first domain-agnostic offline LLM-driven planning system. NL2Plan uses an LLM to incrementally extract the necessary information from a short text prompt before creating a complete PDDL description of both the domain and the problem, which is finally solved by a classical planner. We evaluate NL2Plan on four planning domains and find that it solves 10 out of 15 tasks - a clear improvement over a plain chain-of-thought reasoning LLM approach, which only solves 2 tasks. Moreover, in two out of the five failure cases, instead of returning an invalid plan, NL2Plan reports that it failed to solve the task. In addition to using NL2Plan in end-to-end mode, users can inspect and correct all of its intermediate results, such as the PDDL representation, increasing explainability and making it an assistive tool for PDDL creation.
Read more5/8/2024

0
Generating consistent PDDL domains with Large Language Models
Pavel Smirnov, Frank Joublin, Antonello Ceravola, Michael Gienger
Large Language Models (LLMs) are capable of transforming natural language domain descriptions into plausibly looking PDDL markup. However, ensuring that actions are consistent within domains still remains a challenging task. In this paper we present a novel concept to significantly improve the quality of LLM-generated PDDL models by performing automated consistency checking during the generation process. Although the proposed consistency checking strategies still can't guarantee absolute correctness of generated models, they can serve as valuable source of feedback reducing the amount of correction efforts expected from a human in the loop. We demonstrate the capabilities of our error detection approach on a number of classical and custom planning domains (logistics, gripper, tyreworld, household, pizza).
Read more4/12/2024