Line-based 6-DoF Object Pose Estimation and Tracking With an Event Camera

0
Sign in to get full access
Overview
- Event cameras are a type of visual sensor that capture changes in pixel intensity rather than traditional frames.
- This paper presents a method for estimating and tracking the 6-degree-of-freedom (6-DoF) pose of objects using an event camera.
- The approach uses line-based features to estimate the object's pose and track it over time, even in challenging environments.
Plain English Explanation
Event cameras are a newer type of visual sensor that work differently from traditional cameras. Instead of capturing full frames of image data, event cameras only record changes in pixel intensity. This allows them to operate at much higher speeds and with lower power consumption than standard cameras.
The researchers in this paper developed a method to use an event camera for estimating and tracking the 3D position and orientation (6-DoF pose) of objects in a scene. Their approach focuses on identifying and using line-based features in the event data to calculate the object's pose. This line-based technique allows the system to work even in challenging environments with things like motion blur or limited lighting.
By continuously tracking the object's 6-DoF pose over time, this event camera-based method could enable new applications in areas like robotics, augmented reality, and simultaneous localization and mapping (SLAM). The researchers show that their approach can accurately estimate and robustly track object poses in real-time.
Technical Explanation
The paper presents a line-based method for 6-DoF object pose estimation and tracking using an event camera. Event cameras capture changes in pixel intensity rather than full image frames, allowing for high-speed, low-power operation.
The researchers developed a line-based feature extraction and matching pipeline to identify geometric features in the event data. These line features are then used to estimate the 6-DoF pose of the object using a robust, iterative optimization approach. The system can continuously track the object's pose over time, updating the estimate as new event data is received.
Key aspects of the technical approach include:
- Line feature extraction: Identifying line segments in the event data using efficient geometric algorithms.
- Line feature matching: Associating lines detected in the current frame with a 3D model of the object to establish correspondences.
- Robust pose estimation: Using an iterative optimization technique to estimate the 6-DoF pose from the line correspondences, with built-in robustness to outliers.
- Temporal tracking: Maintaining a state estimate of the object's pose and updating it incrementally as new event data arrives.
The paper evaluates the method's accuracy and robustness through experiments on real-world datasets, showing that it can reliably track object poses in challenging conditions like motion blur and changing illumination. The results demonstrate the potential of event cameras and line-based techniques for real-time 6-DoF object tracking applications.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the line-based 6-DoF pose estimation and tracking approach. The researchers acknowledge several limitations and areas for potential future work:
- The method currently relies on a known 3D model of the object, which may not always be available in practical applications. Extending the approach to handle unknown objects would be an important next step.
- The experiments were conducted on a limited set of objects and scenes. Further testing on a broader range of real-world scenarios would help validate the method's general applicability.
- The computational efficiency of the pose estimation algorithm could be improved, potentially by exploring more efficient line matching or optimization techniques.
Additionally, one could question whether the line-based feature representation is truly the optimal choice for event camera data, or if other geometric primitives (e.g., points, planes) could provide additional robustness or accuracy. Investigating alternative feature representations could be a fruitful area for future research.
Overall, the paper makes a valuable contribution by demonstrating the feasibility of high-performance 6-DoF object tracking using an event camera and line-based techniques. The findings pave the way for further developments in this promising area of computer vision and robotics.
Conclusion
This paper presents a novel approach for 6-DoF object pose estimation and tracking using an event camera. By leveraging line-based features, the method can accurately and robustly estimate and track object poses in challenging environments. The results showcase the potential of event cameras and line-based techniques for real-time applications such as robotics, augmented reality, and SLAM. While the current approach has some limitations, the paper lays the groundwork for continued research and development in this exciting area of computer vision.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Line-based 6-DoF Object Pose Estimation and Tracking With an Event Camera
Zibin Liu, Banglei Guan, Yang Shang, Qifeng Yu, Laurent Kneip
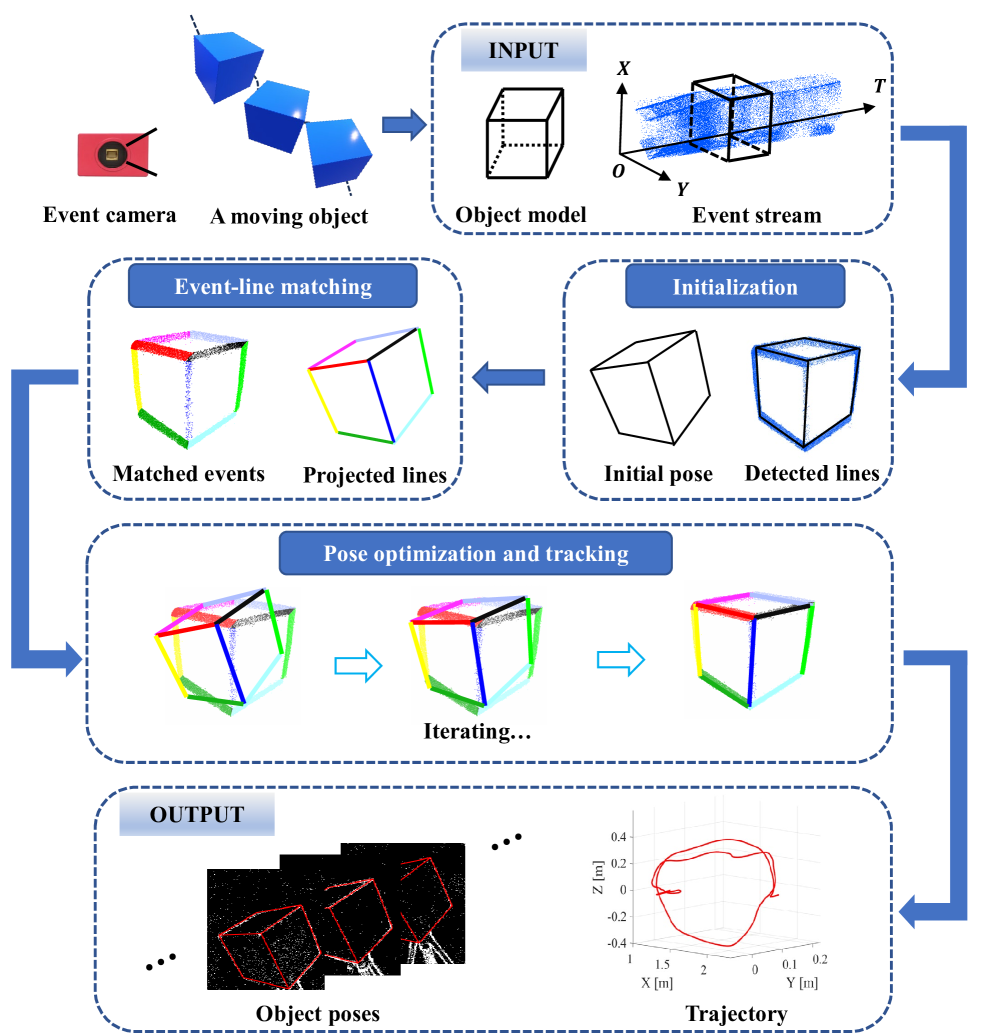
Pose estimation and tracking of objects is a fundamental application in 3D vision. Event cameras possess remarkable attributes such as high dynamic range, low latency, and resilience against motion blur, which enables them to address challenging high dynamic range scenes or high-speed motion. These features make event cameras an ideal complement over standard cameras for object pose estimation. In this work, we propose a line-based robust pose estimation and tracking method for planar or non-planar objects using an event camera. Firstly, we extract object lines directly from events, then provide an initial pose using a globally-optimal Branch-and-Bound approach, where 2D-3D line correspondences are not known in advance. Subsequently, we utilize event-line matching to establish correspondences between 2D events and 3D models. Furthermore, object poses are refined and continuously tracked by minimizing event-line distances. Events are assigned different weights based on these distances, employing robust estimation algorithms. To evaluate the precision of the proposed methods in object pose estimation and tracking, we have devised and established an event-based moving object dataset. Compared against state-of-the-art methods, the robustness and accuracy of our methods have been validated both on synthetic experiments and the proposed dataset. The source code is available at https://github.com/Zibin6/LOPET.
Read more8/7/2024
🔍
0
An Event-based Algorithm for Simultaneous 6-DOF Camera Pose Tracking and Mapping
Masoud Dayani Najafabadi, Mohammad Reza Ahmadzadeh
Compared to regular cameras, Dynamic Vision Sensors or Event Cameras can output compact visual data based on a change in the intensity in each pixel location asynchronously. In this paper, we study the application of current image-based SLAM techniques to these novel sensors. To this end, the information in adaptively selected event windows is processed to form motion-compensated images. These images are then used to reconstruct the scene and estimate the 6-DOF pose of the camera. We also propose an inertial version of the event-only pipeline to assess its capabilities. We compare the results of different configurations of the proposed algorithm against the ground truth for sequences of two publicly available event datasets. We also compare the results of the proposed event-inertial pipeline with the state-of-the-art and show it can produce comparable or more accurate results provided the map estimate is reliable.
Read more6/27/2024
❗
0
3D Human Scan With A Moving Event Camera
Kai Kohyama, Shintaro Shiba, Yoshimitsu Aoki
Capturing a 3D human body is one of the important tasks in computer vision with a wide range of applications such as virtual reality and sports analysis. However, conventional frame cameras are limited by their temporal resolution and dynamic range, which imposes constraints in real-world application setups. Event cameras have the advantages of high temporal resolution and high dynamic range (HDR), but the development of event-based methods is necessary to handle data with different characteristics. This paper proposes a novel event-based method for 3D pose estimation and human mesh recovery. Prior work on event-based human mesh recovery require frames (images) as well as event data. The proposed method solely relies on events; it carves 3D voxels by moving the event camera around a stationary body, reconstructs the human pose and mesh by attenuated rays, and fit statistical body models, preserving high-frequency details. The experimental results show that the proposed method outperforms conventional frame-based methods in the estimation accuracy of both pose and body mesh. We also demonstrate results in challenging situations where a conventional camera has motion blur. This is the first to demonstrate event-only human mesh recovery, and we hope that it is the first step toward achieving robust and accurate 3D human body scanning from vision sensors. https://florpeng.github.io/event-based-human-scan/
Read more4/17/2024

0
IMU-Aided Event-based Stereo Visual Odometry
Junkai Niu, Sheng Zhong, Yi Zhou
Direct methods for event-based visual odometry solve the mapping and camera pose tracking sub-problems by establishing implicit data association in a way that the generative model of events is exploited. The main bottlenecks faced by state-of-the-art work in this field include the high computational complexity of mapping and the limited accuracy of tracking. In this paper, we improve our previous direct pipeline textit{Event-based Stereo Visual Odometry} in terms of accuracy and efficiency. To speed up the mapping operation, we propose an efficient strategy of edge-pixel sampling according to the local dynamics of events. The mapping performance in terms of completeness and local smoothness is also improved by combining the temporal stereo results and the static stereo results. To circumvent the degeneracy issue of camera pose tracking in recovering the yaw component of general 6-DoF motion, we introduce as a prior the gyroscope measurements via pre-integration. Experiments on publicly available datasets justify our improvement. We release our pipeline as an open-source software for future research in this field.
Read more5/8/2024