Low Fidelity Digital Twin for Automated Driving Systems: Use Cases and Automatic Generation
2405.13705
0
0
🛸
Abstract
Automated driving systems are an integral part of the automotive industry. Tools such as Robot Operating System and simulators support their development. However, in the end, the developers must test their algorithms on a real vehicle. To better observe the difference between reality and simulation--the reality gap--digital twin technology offers real-time communication between the real vehicle and its model. We present low fidelity digital twin generator and describe situations where automatic generation is preferable to high fidelity simulation. We validated our approach of generating a virtual environment with a vehicle model by replaying the data recorded from the real vehicle.
Create account to get full access
Overview
- Automated driving systems are an essential part of the automotive industry
- Tools like Robot Operating System and simulators support their development
- However, developers must ultimately test their algorithms on a real vehicle
- To better observe the difference between reality and simulation, digital twin technology offers real-time communication between the real vehicle and its model
- This paper presents a low-fidelity digital twin generator and describes situations where automatic generation is preferable to high-fidelity simulation
- The approach is validated by replaying data recorded from a real vehicle.
Plain English Explanation
Automated driving systems, such as self-driving cars, are a crucial part of the modern automotive industry. Developers use tools like Robot Operating System and computer simulations to test and refine these systems. However, at some point, they need to try out their algorithms on a real vehicle to see how they perform in the real world. This is where the "reality gap" comes into play - the differences between the simulated environment and the actual physical environment.
To better understand this gap, the researchers in this paper used digital twin technology. This allows the real vehicle and its virtual model to communicate in real-time, providing a more accurate representation of how the system would behave in the real world. The paper presents a simplified, or "low-fidelity," way to generate this digital twin, which may be preferable to creating a highly detailed, "high-fidelity" simulation in certain situations.
The researchers validated their approach by taking data collected from a real vehicle and using it to recreate the virtual environment and vehicle model. This allowed them to see how well the digital twin matched the actual performance of the real vehicle.
Technical Explanation
The paper describes a method for generating a low-fidelity digital twin of a vehicle, which can be used to bridge the gap between simulation and real-world testing of automated driving systems. The researchers argue that in some cases, a simplified digital twin may be preferable to a highly detailed simulation, as it can provide real-time communication between the virtual and physical systems.
The key elements of the paper include:
- Experiment Design: The researchers collected data from a real vehicle and used it to create a virtual environment and vehicle model, validating the digital twin approach.
- Architecture: The low-fidelity digital twin generator creates a simplified virtual representation of the vehicle and its surroundings, which can communicate with the physical system in real-time.
- Insights: The paper discusses situations where automatic generation of a low-fidelity digital twin may be more beneficial than building a high-fidelity simulation, such as when computational resources are limited or when the focus is on testing specific aspects of the system.
The paper's approach is validated by replaying the data recorded from the real vehicle and comparing the performance of the digital twin to the actual vehicle behavior, demonstrating the potential of this technique for diagnosing and predicting autonomous vehicle operational safety and acquiring data for data-driven development.
Critical Analysis
The paper presents a promising approach to generating low-fidelity digital twins for automated driving systems, which can help bridge the reality gap between simulation and real-world testing. However, the researchers acknowledge that their method has some limitations, such as the potential for inaccuracies in the virtual representation of the vehicle and its environment.
Additionally, while the paper discusses situations where a low-fidelity digital twin may be preferable to a high-fidelity simulation, it does not provide a comprehensive comparison of the two approaches. Further research may be needed to fully understand the trade-offs and to determine the optimal use cases for each approach.
It's also worth considering the potential challenges of integrating digital twin technology into the development and testing of automated driving systems, such as the need for robust communication protocols and the potential for cybersecurity vulnerabilities.
Overall, the research presented in this paper is a valuable contribution to the field of automated driving, and the low-fidelity digital twin approach could be an important tool in the ongoing development and validation of these systems.
Conclusion
This paper presents a method for generating low-fidelity digital twins of vehicles, which can be used to bridge the gap between simulation and real-world testing of automated driving systems. The researchers demonstrate the potential of this approach by validating their digital twin model against data collected from a real vehicle.
The use of digital twin technology in the development of automated driving systems is a promising area of research, as it can provide a more accurate representation of how these systems will perform in the real world. By generating simplified, low-fidelity digital twins, the researchers have shown that this technology can be a valuable tool even when computational resources are limited or when the focus is on testing specific aspects of the system.
As the field of automated driving continues to evolve, the insights and techniques presented in this paper may contribute to the ongoing efforts to validate and improve the safety and performance of these systems across a range of real-world scenarios.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🎯
An Advanced Framework for Ultra-Realistic Simulation and Digital Twinning for Autonomous Vehicles
Yuankai He, Hanlin Chen, Weisong Shi
0
0
Simulation is a fundamental tool in developing autonomous vehicles, enabling rigorous testing without the logistical and safety challenges associated with real-world trials. As autonomous vehicle technologies evolve and public safety demands increase, advanced, realistic simulation frameworks are critical. Current testing paradigms employ a mix of general-purpose and specialized simulators, such as CARLA and IVRESS, to achieve high-fidelity results. However, these tools often struggle with compatibility due to differing platform, hardware, and software requirements, severely hampering their combined effectiveness. This paper introduces BlueICE, an advanced framework for ultra-realistic simulation and digital twinning, to address these challenges. BlueICE's innovative architecture allows for the decoupling of computing platforms, hardware, and software dependencies while offering researchers customizable testing environments to meet diverse fidelity needs. Key features include containerization to ensure compatibility across different systems, a unified communication bridge for seamless integration of various simulation tools, and synchronized orchestration of input and output across simulators. This framework facilitates the development of sophisticated digital twins for autonomous vehicle testing and sets a new standard in simulation accuracy and flexibility. The paper further explores the application of BlueICE in two distinct case studies: the ICAT indoor testbed and the STAR campus outdoor testbed at the University of Delaware. These case studies demonstrate BlueICE's capability to create sophisticated digital twins for autonomous vehicle testing and underline its potential as a standardized testbed for future autonomous driving technologies.
5/3/2024

Maturity of Vehicle Digital Twins: From Monitoring to Enabling Autonomous Driving
Robert Klar, Niklas Arvidsson, Vangelis Angelakis
0
0
Digital twinning of vehicles is an iconic application of digital twins, as the concept of twinning dates back to the twinning of NASA space vehicles. Although digital twins (DTs) in the automotive industry have been recognized for their ability to improve efficiency in design and manufacturing, their potential to enhance land vehicle operation has yet to be fully explored. Most existing DT research on vehicle operations, aside from the existing body of work on autonomous guided vehicles (AGVs), focuses on electrified passenger cars. However, the use and value of twinning varies depending on the goal, whether it is to provide cost-efficient and sustainable freight transport without disruptions, sustainable public transport focused on passenger well-being, or fully autonomous vehicle operation. In this context, DTs are used for a range of applications, from real-time battery health monitoring to enabling fully autonomous vehicle operations. This leads to varying requirements, complexities, and maturities of the implemented DT solutions. This paper analyzes recent trends in DT-driven efficiency gains for freight, public, and autonomous vehicles and discusses their required level of maturity based on a maturity tool. The application of our DT maturity tool reveals that most DTs have reached level 3 and enable real-time monitoring. Additionally, DTs of level 5 already exist in closed environments, allowing for restricted autonomous operation.
4/15/2024
Towards Validation of Autonomous Vehicles Across Scales using an Integrated Digital Twin Framework
Tanmay Vilas Samak, Chinmay Vilas Samak, Venkat Narayan Krovi
0
0
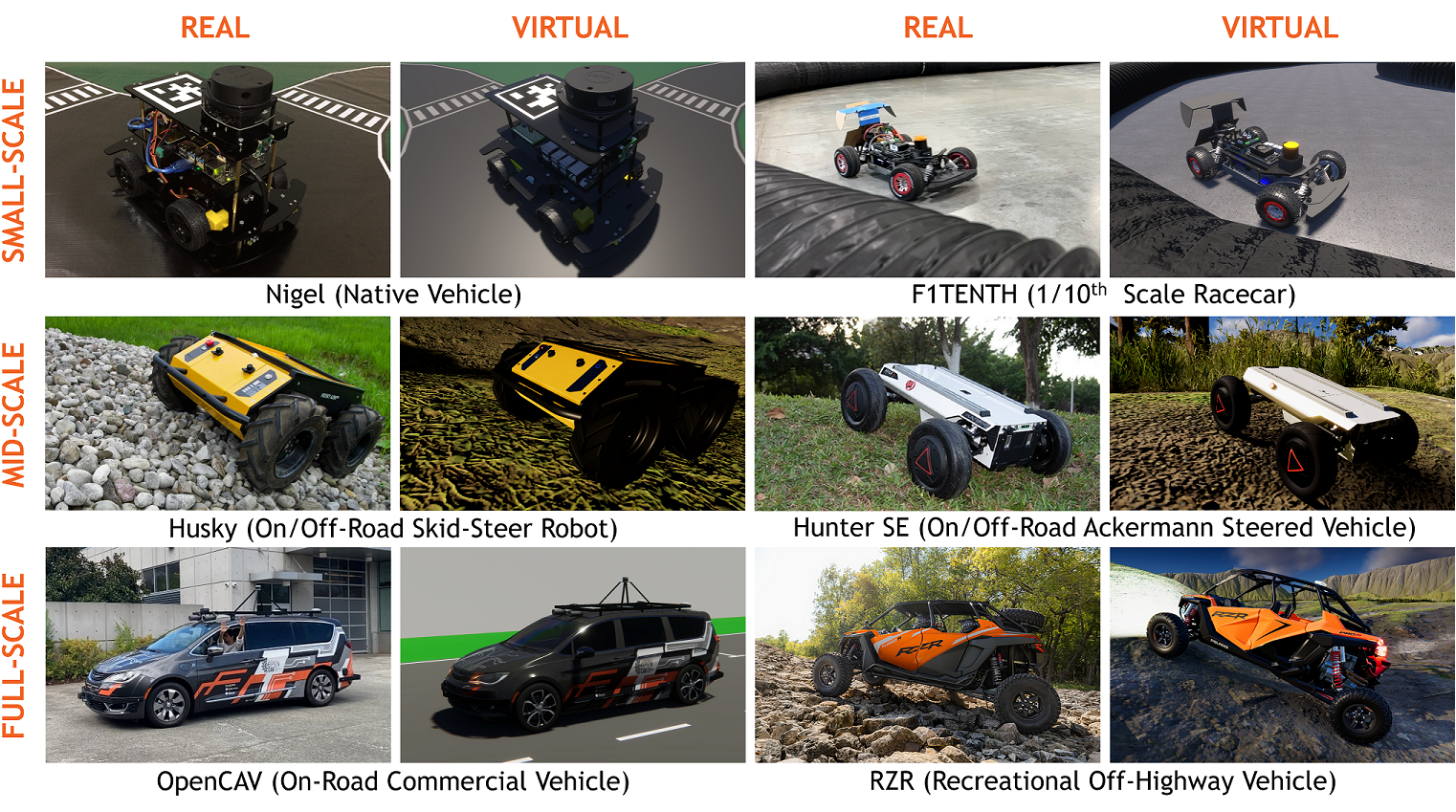
Autonomous vehicle platforms of varying spatial scales are employed within the research and development spectrum based on space, safety and monetary constraints. However, deploying and validating autonomy algorithms across varying operational scales presents challenges due to scale-specific dynamics, sensor integration complexities, computational constraints, regulatory considerations, environmental variability, interaction with other traffic participants and scalability concerns. In such a milieu, this work focuses on developing a unified framework for modeling and simulating digital twins of autonomous vehicle platforms across different scales and operational design domains (ODDs) to help support the streamlined development and validation of autonomy software stacks. Particularly, this work discusses the development of digital twin representations of 4 autonomous ground vehicles, which span across 3 different scales and target 3 distinct ODDs. We study the adoption of these autonomy-oriented digital twins to deploy a common autonomy software stack with an aim of end-to-end map-based navigation to achieve the ODD-specific objective(s) for each vehicle. Finally, we also discuss the flexibility of the proposed framework to support virtual, hybrid as well as physical testing with seamless sim2real transfer.
5/8/2024

Metaverse for Safer Roadways: An Immersive Digital Twin Framework for Exploring Human-Autonomy Coexistence in Urban Transportation Systems
Tanmay Vilas Samak, Chinmay Vilas Samak, Venkat Narayan Krovi
0
0
Societal-scale deployment of autonomous vehicles requires them to coexist with human drivers, necessitating mutual understanding and coordination among these entities. However, purely real-world or simulation-based experiments cannot be employed to explore such complex interactions due to safety and reliability concerns, respectively. Consequently, this work presents an immersive digital twin framework to explore and experiment with the interaction dynamics between autonomous and non-autonomous traffic participants. Particularly, we employ a mixed-reality human-machine interface to allow human drivers and autonomous agents to observe and interact with each other for testing edge-case scenarios while ensuring safety at all times. To validate the versatility of the proposed framework's modular architecture, we first present a discussion on a set of user experience experiments encompassing 4 different levels of immersion with 4 distinct user interfaces. We then present a case study of uncontrolled intersection traversal to demonstrate the efficacy of the proposed framework in validating the interactions of a primary human-driven, autonomous, and connected autonomous vehicle with a secondary semi-autonomous vehicle. The proposed framework has been openly released to guide the future of autonomy-oriented digital twins and research on human-autonomy coexistence.
6/11/2024