Maturity of Vehicle Digital Twins: From Monitoring to Enabling Autonomous Driving

0

Sign in to get full access
Overview
- This paper discusses the maturity and evolution of digital twins for vehicles, from their use in monitoring to their potential for enabling autonomous driving.
- The paper explores the key capabilities and applications of digital twins in the context of passenger and freight transportation.
- It also presents a maturity assessment framework for vehicle digital twins, highlighting their current state and future potential.
Plain English Explanation
Digital twins are virtual representations of physical objects, such as vehicles, that can be used to monitor and simulate their behavior. As digital twin technology has advanced, vehicle digital twins are becoming increasingly sophisticated, moving beyond simple monitoring to enabling more complex applications like autonomous driving.
The paper explains how vehicle digital twins can be used to track the health and performance of individual vehicles, as well as entire fleets. By integrating digital twin models with real-time sensor data, companies can better understand how their vehicles are performing and identify potential issues before they occur.
Looking to the future, the researchers suggest that vehicle digital twins could be used to support the development of autonomous driving capabilities. By combining digital twin models with AI-powered prediction and control systems, it may be possible to create digital representations of vehicles that can accurately simulate and predict their behavior in complex driving scenarios.
This could help accelerate the testing and validation of autonomous driving algorithms, ultimately leading to safer and more reliable self-driving vehicles. The paper presents a maturity assessment framework to help organizations understand the current capabilities of vehicle digital twins and plan for their future development.
Technical Explanation
The paper begins by providing an overview of digital twins and their applications in the transportation sector. The authors explain how digital twins can be used to monitor the health and performance of individual vehicles, as well as entire fleets, by integrating real-time sensor data with virtual models.
Building on this foundation, the researchers then explore the potential for vehicle digital twins to enable autonomous driving capabilities. They propose that by combining digital twin models with advanced AI and simulation techniques, it may be possible to create highly accurate representations of vehicle behavior that can be used to develop and test autonomous driving algorithms.
To assess the current state and future potential of vehicle digital twins, the authors present a maturity assessment framework. This framework outlines five key capability levels, ranging from basic monitoring and diagnostics to the ability to enable autonomous driving and even self-optimization using generative AI.
The paper then applies this framework to several use cases in both passenger and freight transportation, highlighting the varying levels of digital twin maturity and the potential benefits that can be realized at each stage.
Critical Analysis
The paper provides a comprehensive and well-structured overview of the current state and future potential of vehicle digital twins. The proposed maturity assessment framework is a particularly valuable contribution, as it gives organizations a clear roadmap for developing and deploying these technologies.
However, the paper does not address some of the potential challenges and limitations associated with vehicle digital twins. For example, the authors do not discuss the data requirements and integration challenges that organizations may face when trying to create accurate digital twin models, or the potential privacy and security concerns that could arise from the extensive data collection and monitoring required.
Additionally, while the paper outlines the potential for vehicle digital twins to enable autonomous driving, it does not delve deeply into the technical details or the significant hurdles that still need to be overcome in this area. More discussion of the current limitations of autonomous driving technology and the role that digital twins could play in addressing these challenges would have been valuable.
Overall, the paper provides a solid foundation for understanding the evolving capabilities of vehicle digital twins, but there is room for further exploration of the practical and technical obstacles that organizations may face in realizing the full potential of these technologies.
Conclusion
This paper presents a comprehensive overview of the maturity and evolution of vehicle digital twins, from their current use in monitoring and diagnostics to their future potential for enabling autonomous driving capabilities.
The researchers have developed a maturity assessment framework that outlines five key capability levels, allowing organizations to understand their current digital twin capabilities and plan for future development. By integrating digital twin models with advanced AI and simulation techniques, the authors suggest that vehicle digital twins could play a crucial role in accelerating the testing and validation of autonomous driving algorithms, ultimately leading to safer and more reliable self-driving vehicles.
While the paper does not address all of the potential challenges and limitations associated with these technologies, it provides a valuable roadmap for organizations looking to leverage the power of digital twins in the transportation sector.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Maturity of Vehicle Digital Twins: From Monitoring to Enabling Autonomous Driving
Robert Klar, Niklas Arvidsson, Vangelis Angelakis
Digital twinning of vehicles is an iconic application of digital twins, as the concept of twinning dates back to the twinning of NASA space vehicles. Although digital twins (DTs) in the automotive industry have been recognized for their ability to improve efficiency in design and manufacturing, their potential to enhance land vehicle operation has yet to be fully explored. Most existing DT research on vehicle operations, aside from the existing body of work on autonomous guided vehicles (AGVs), focuses on electrified passenger cars. However, the use and value of twinning varies depending on the goal, whether it is to provide cost-efficient and sustainable freight transport without disruptions, sustainable public transport focused on passenger well-being, or fully autonomous vehicle operation. In this context, DTs are used for a range of applications, from real-time battery health monitoring to enabling fully autonomous vehicle operations. This leads to varying requirements, complexities, and maturities of the implemented DT solutions. This paper analyzes recent trends in DT-driven efficiency gains for freight, public, and autonomous vehicles and discusses their required level of maturity based on a maturity tool. The application of our DT maturity tool reveals that most DTs have reached level 3 and enable real-time monitoring. Additionally, DTs of level 5 already exist in closed environments, allowing for restricted autonomous operation.
Read more9/23/2024
0
Digital Twins and Testbeds for Supporting AI Research with Autonomous Vehicle Networks
An{i}l Gurses, Gautham Reddy, Saad Masrur, Ozgur Ozdemir, .Ismail Guvenc{c}, Mihail L. Sichitiu, Alphan c{S}ahin, Ahmed Alkhateeb, Magreth Mushi, Rudra Dutta
Digital twins (DTs), which are virtual environments that simulate, predict, and optimize the performance of their physical counterparts, hold great promise in revolutionizing next-generation wireless networks. While DTs have been extensively studied for wireless networks, their use in conjunction with autonomous vehicles featuring programmable mobility remains relatively under-explored. In this paper, we study DTs used as a development environment to design, deploy, and test artificial intelligence (AI) techniques that utilize real-world (RW) observations, e.g. radio key performance indicators, for vehicle trajectory and network optimization decisions in autonomous vehicle networks (AVN). We first compare and contrast the use of simulation, digital twin (software in the loop (SITL)), sandbox (hardware-in-the-loop (HITL)), and physical testbed (PT) environments for their suitability in developing and testing AI algorithms for AVNs. We then review various representative use cases of DTs for AVN scenarios. Finally, we provide an example from the NSF AERPAW platform where a DT is used to develop and test AI-aided solutions for autonomous unmanned aerial vehicles for localizing a signal source based solely on link quality measurements. Our results in the physical testbed show that SITL DTs, when supplemented with data from RW measurements and simulations, can serve as an ideal environment for developing and testing innovative AI solutions for AVNs.
Read more8/9/2024
0
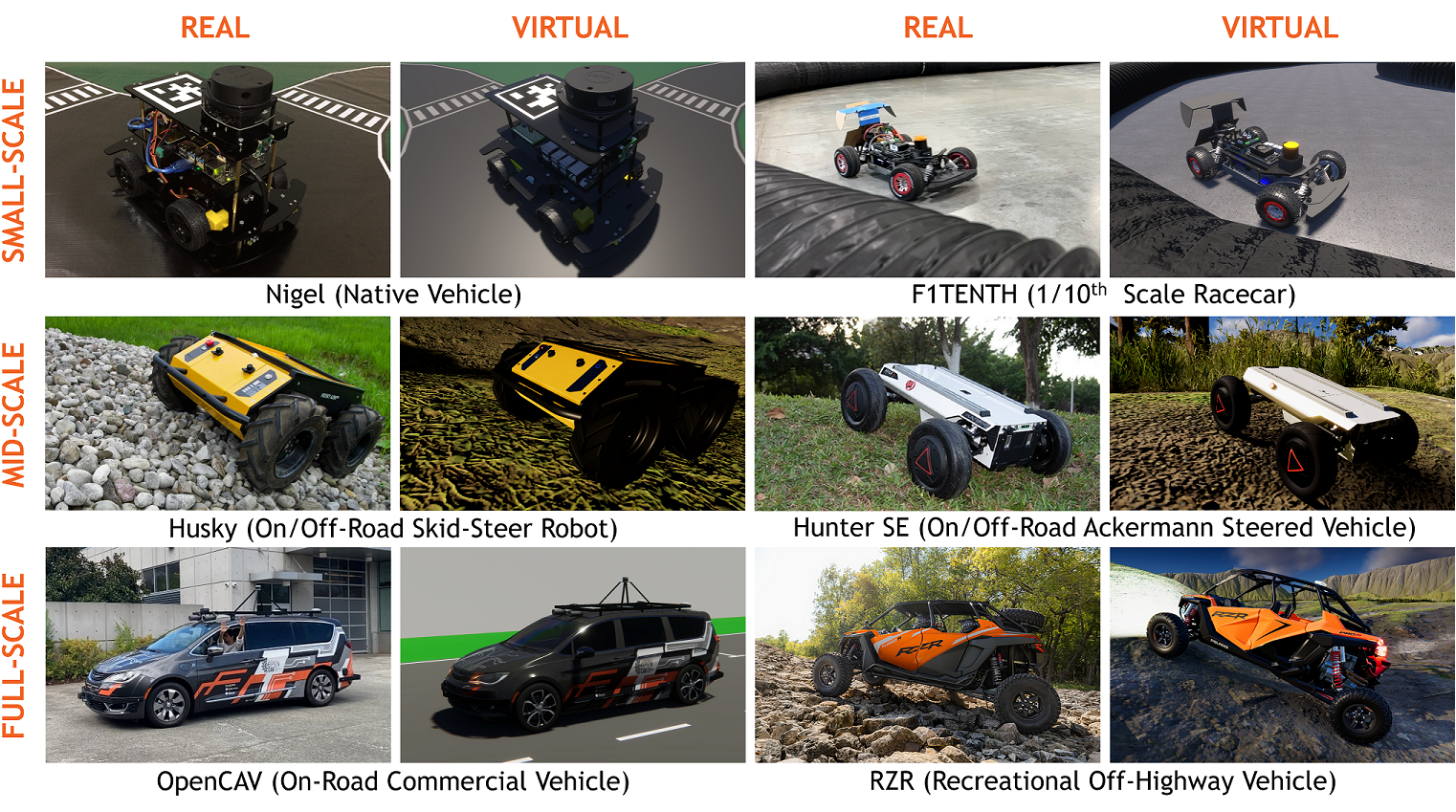
Towards Validation of Autonomous Vehicles Across Scales using an Integrated Digital Twin Framework
Tanmay Vilas Samak, Chinmay Vilas Samak, Venkat Narayan Krovi
Autonomous vehicle platforms of varying spatial scales are employed within the research and development spectrum based on space, safety and monetary constraints. However, deploying and validating autonomy algorithms across varying operational scales presents challenges due to scale-specific dynamics, sensor integration complexities, computational constraints, regulatory considerations, environmental variability, interaction with other traffic participants and scalability concerns. In such a milieu, this work focuses on developing a unified framework for modeling and simulating digital twins of autonomous vehicle platforms across different scales and operational design domains (ODDs) to help support the streamlined development and validation of autonomy software stacks. Particularly, this work discusses the development of digital twin representations of 4 autonomous ground vehicles, which span across 3 different scales and target 3 distinct ODDs. We study the adoption of these autonomy-oriented digital twins to deploy a common autonomy software stack with an aim of end-to-end map-based navigation to achieve the ODD-specific objective(s) for each vehicle. Finally, we also discuss the flexibility of the proposed framework to support virtual, hybrid as well as physical testing with seamless sim2real transfer.
Read more5/8/2024
🛸
0
Low Fidelity Digital Twin for Automated Driving Systems: Use Cases and Automatic Generation
Jiri Vlasak, Jaroslav Klap'alek, Adam Kollarv{c}'ik, Michal Sojka, Zdenv{e}k Hanz'alek
Automated driving systems are an integral part of the automotive industry. Tools such as Robot Operating System and simulators support their development. However, in the end, the developers must test their algorithms on a real vehicle. To better observe the difference between reality and simulation--the reality gap--digital twin technology offers real-time communication between the real vehicle and its model. We present low fidelity digital twin generator and describe situations where automatic generation is preferable to high fidelity simulation. We validated our approach of generating a virtual environment with a vehicle model by replaying the data recorded from the real vehicle.
Read more8/12/2024