LU2Net: A Lightweight Network for Real-time Underwater Image Enhancement

0

Sign in to get full access
Overview
- This paper introduces a lightweight deep learning model called LU2Net for real-time underwater image enhancement.
- The model is designed to be efficient and deployable on low-power devices, making it suitable for underwater robotics and exploration applications.
- LU2Net achieves state-of-the-art performance on common underwater image enhancement benchmarks while using fewer parameters and being faster than other deep learning models.
Plain English Explanation
Underwater images can often appear hazy, blurry, and discolored due to the effects of water, lighting, and other environmental factors. LU2Net is a new deep learning algorithm that can automatically enhance these types of underwater images, making them clearer and more vivid.
What makes LU2Net special is that it is a "lightweight" model, meaning it has a relatively small number of parameters and can run quickly on computers and devices with limited processing power. This is important for applications like underwater robotics and exploration, where the computing resources onboard may be constrained.
Despite its small size, LU2Net is able to outperform more complex and resource-intensive deep learning models on standard benchmarks for underwater image enhancement. This suggests the algorithm has learned efficient ways to process and improve these types of images.
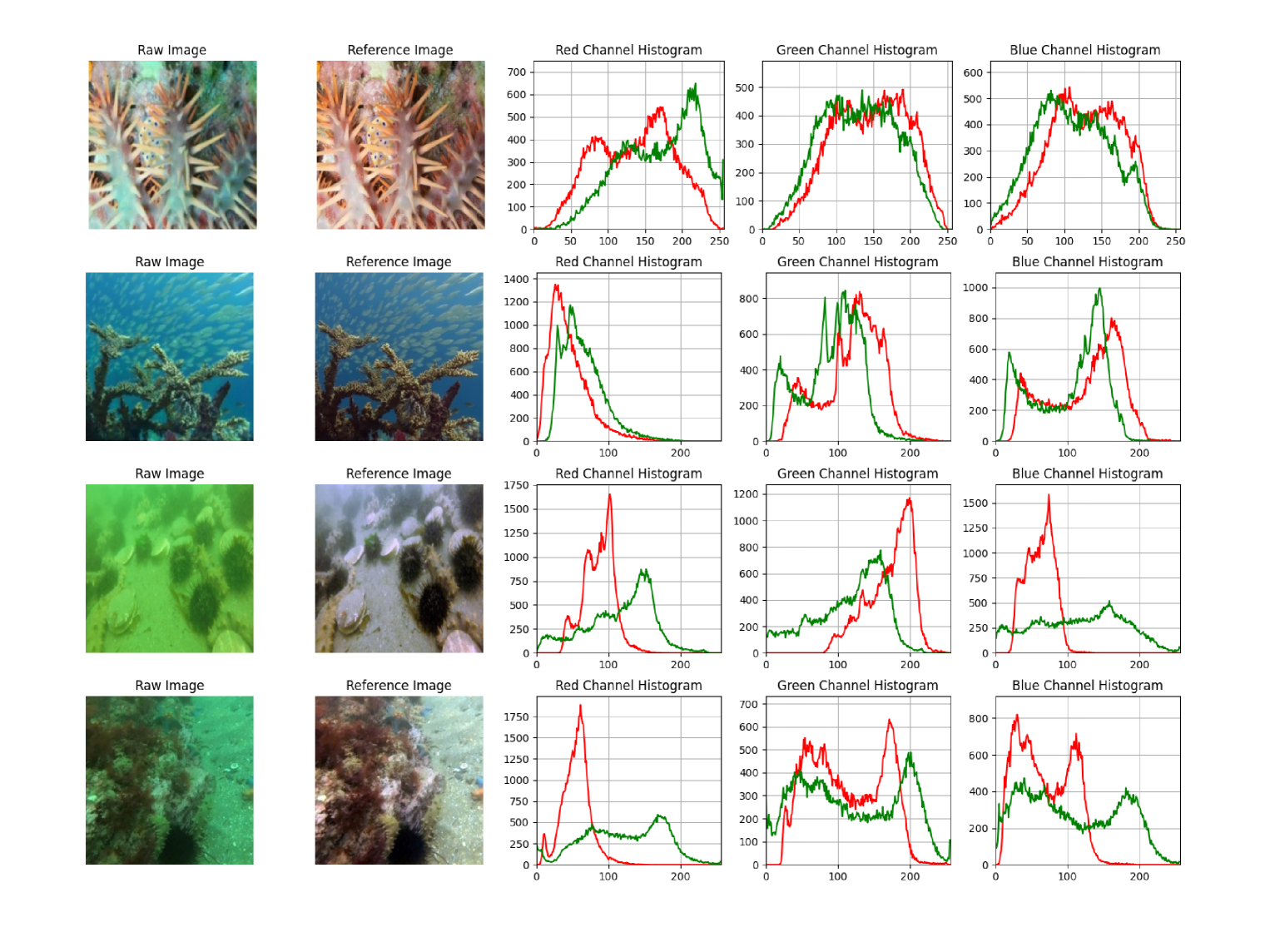
The authors of the paper demonstrate LU2Net's effectiveness on a variety of real-world underwater images, showing how it can correct color casts, remove haze, and sharpen details. This could be valuable for marine biologists, oceanographers, and underwater vehicle operators who need to work with clear, high-quality visual data.
Technical Explanation
The core of LU2Net is a convolutional neural network architecture that takes a degraded underwater image as input and outputs an enhanced version. The network uses a "U-Net" style design, which has been shown to be effective for image-to-image translation tasks.
A key innovation in LU2Net is the use of a "lightweight" version of the U-Net, with significantly fewer parameters than a standard U-Net. This is achieved through techniques like depthwise separable convolutions and channel attention modules, which allow the model to be more efficient while maintaining high performance.
The authors also incorporate "physics-aware" components into the network, drawing inspiration from prior work on physics-based underwater image enhancement. This includes modeling the effects of light attenuation and color distortion in water, which helps the model learn more effective enhancement strategies.
Experiments show that LU2Net outperforms state-of-the-art underwater image enhancement methods on standard benchmarks, while using only ~7,000 parameters - far fewer than many competing deep learning models. The authors also demonstrate real-time performance, making LU2Net suitable for deployment on resource-constrained platforms like underwater vehicles or embedded systems.
Critical Analysis
One limitation of the LU2Net paper is that the evaluation is primarily focused on quantitative metrics, without extensive user studies or qualitative assessments of the enhanced images. While the numerical results are promising, it would be valuable to better understand how the improved images are perceived and valued by domain experts like marine biologists or underwater photographers.
Additionally, the paper does not explore the generalization capabilities of LU2Net across a wide range of underwater environments and imaging conditions. The experiments are conducted on a relatively small number of datasets, and it's unclear how well the model would perform on more diverse or challenging underwater scenes.
Further research could also investigate the robustness of LU2Net to factors like sensor noise, water turbulence, or varying illumination conditions. Techniques like LHU-Net or UWFormer that combine multiple models or leverage semi-supervised learning could potentially improve the model's versatility and performance in real-world settings.
Conclusion
The LU2Net paper presents a promising deep learning approach for real-time underwater image enhancement that is both effective and efficient. By leveraging a lightweight U-Net architecture and physics-aware components, the authors have developed a model that can improve the visual quality of underwater imagery while being deployable on low-power devices.
This work could have important implications for a variety of marine research, exploration, and robotics applications where clear, high-quality visual data is essential. As underwater imaging and autonomous systems continue to advance, efficient and capable enhancement algorithms like LU2Net will play a crucial role in unlocking the full potential of these technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
LU2Net: A Lightweight Network for Real-time Underwater Image Enhancement
Haodong Yang, Jisheng Xu, Zhiliang Lin, Jianping He
Computer vision techniques have empowered underwater robots to effectively undertake a multitude of tasks, including object tracking and path planning. However, underwater optical factors like light refraction and absorption present challenges to underwater vision, which cause degradation of underwater images. A variety of underwater image enhancement methods have been proposed to improve the effectiveness of underwater vision perception. Nevertheless, for real-time vision tasks on underwater robots, it is necessary to overcome the challenges associated with algorithmic efficiency and real-time capabilities. In this paper, we introduce Lightweight Underwater Unet (LU2Net), a novel U-shape network designed specifically for real-time enhancement of underwater images. The proposed model incorporates axial depthwise convolution and the channel attention module, enabling it to significantly reduce computational demands and model parameters, thereby improving processing speed. The extensive experiments conducted on the dataset and real-world underwater robots demonstrate the exceptional performance and speed of proposed model. It is capable of providing well-enhanced underwater images at a speed 8 times faster than the current state-of-the-art underwater image enhancement method. Moreover, LU2Net is able to handle real-time underwater video enhancement.
Read more6/24/2024

0
Harnessing Multi-resolution and Multi-scale Attention for Underwater Image Restoration
Alik Pramanick, Arijit Sur, V. Vijaya Saradhi
Underwater imagery is often compromised by factors such as color distortion and low contrast, posing challenges for high-level vision tasks. Recent underwater image restoration (UIR) methods either analyze the input image at full resolution, resulting in spatial richness but contextual weakness, or progressively from high to low resolution, yielding reliable semantic information but reduced spatial accuracy. Here, we propose a lightweight multi-stage network called Lit-Net that focuses on multi-resolution and multi-scale image analysis for restoring underwater images while retaining original resolution during the first stage, refining features in the second, and focusing on reconstruction in the final stage. Our novel encoder block utilizes parallel $1times1$ convolution layers to capture local information and speed up operations. Further, we incorporate a modified weighted color channel-specific $l_1$ loss ($cl_1$) function to recover color and detail information. Extensive experimentations on publicly available datasets suggest our model's superiority over recent state-of-the-art methods, with significant improvement in qualitative and quantitative measures, such as $29.477$ dB PSNR ($1.92%$ improvement) and $0.851$ SSIM ($2.87%$ improvement) on the EUVP dataset. The contributions of Lit-Net offer a more robust approach to underwater image enhancement and super-resolution, which is of considerable importance for underwater autonomous vehicles and surveillance. The code is available at: https://github.com/Alik033/Lit-Net.
Read more8/20/2024
0
A 7K Parameter Model for Underwater Image Enhancement based on Transmission Map Prior
Fuheng Zhou, Dikai Wei, Ye Fan, Yulong Huang, Yonggang Zhang
Although deep learning based models for underwater image enhancement have achieved good performance, they face limitations in both lightweight and effectiveness, which prevents their deployment and application on resource-constrained platforms. Moreover, most existing deep learning based models use data compression to get high-level semantic information in latent space instead of using the original information. Therefore, they require decoder blocks to generate the details of the output. This requires additional computational cost. In this paper, a lightweight network named lightweight selective attention network (LSNet) based on the top-k selective attention and transmission maps mechanism is proposed. The proposed model achieves a PSNR of 97% with only 7K parameters compared to a similar attention-based model. Extensive experiments show that the proposed LSNet achieves excellent performance in state-of-the-art models with significantly fewer parameters and computational resources. The code is available at https://github.com/FuhengZhou/LSNet}{https://github.com/FuhengZhou/LSNet.
Read more5/28/2024

0
Underwater Variable Zoom-Depth-Guided Perception Network for Underwater Image Enhancement
Zhixiong Huang, Xinying Wang, Chengpei Xu, Jinjiang Li, Lin Feng
Underwater scenes intrinsically involve degradation problems owing to heterogeneous ocean elements. Prevailing underwater image enhancement (UIE) methods stick to straightforward feature modeling to learn the mapping function, which leads to limited vision gain as it lacks more explicit physical cues (e.g., depth). In this work, we investigate injecting the depth prior into the deep UIE model for more precise scene enhancement capability. To this end, we present a novel depth-guided perception UIE framework, dubbed underwater variable zoom (UVZ). Specifically, UVZ resorts to a two-stage pipeline. First, a depth estimation network is designed to generate critical depth maps, combined with an auxiliary supervision network introduced to suppress estimation differences during training. Second, UVZ parses near-far scenarios by harnessing the predicted depth maps, enabling local and non-local perceiving in different regions. Extensive experiments on five benchmark datasets demonstrate that UVZ achieves superior visual gain and delivers promising quantitative metrics. Besides, UVZ is confirmed to exhibit good generalization in some visual tasks, especially in unusual lighting conditions. The code, models and results are available at: https://github.com/WindySprint/UVZ.
Read more9/10/2024