Mastering Robot Manipulation with Multimodal Prompts through Pretraining and Multi-task Fine-tuning

0
🎲
Sign in to get full access
Overview
- This paper introduces a novel framework for training robots to understand and follow multimodal prompts, which combine visual information and text descriptions.
- The researchers developed a two-stage training pipeline that first performs inverse dynamics pretraining and then fine-tunes the model on multi-task expert trajectories.
- The multimodal prompt encoder combines a pretrained language model with a residual connection to the visual input, and models the dependencies among action dimensions.
- The framework is evaluated on the VIMA-BENCH dataset and achieves a new state-of-the-art performance, with a 10% improvement in success rate.
- The model also demonstrates remarkable in-context learning abilities.
Plain English Explanation
The paper describes a new way to train robots to understand and follow instructions that combine visual information, like images or videos, with text descriptions. This type of task is challenging for robots because they need to be able to understand how the visual and language signals work together and complement each other.
The researchers developed a two-step training process to help the robot learn this multimodal understanding. First, they pretrained the model on a task called "inverse dynamics," which teaches the robot how to translate its actions into the right movements. Then, they fine-tuned the model on a variety of different tasks, using expert demonstrations as the training data.
To help the robot process the combined visual and text inputs, the researchers designed a special "multimodal prompt encoder." This encoder takes the language model and adds a connection to the visual input, so the model can learn how the two signals work together. It also models the relationships between the different parts of the robot's actions.
When the researchers tested this framework on a benchmark dataset called VIMA-BENCH, they found it performed better than previous approaches, with a 10% improvement in success rate. Importantly, the model also showed that it could quickly learn new tasks by just seeing a few examples, a skill called "in-context learning."
Technical Explanation
The paper introduces a novel framework for training robots to understand and follow multimodal prompts, which combine vision signals and text descriptions. This type of task poses a significant challenge for robots, as they need to learn the interconnection and complementarity between visual and language inputs.
The researchers developed a two-stage training pipeline to address this challenge. First, they perform inverse dynamics pretraining, which teaches the model how to translate its actions into the appropriate robot movements. Then, they fine-tune the model on multi-task expert trajectories, leveraging the VIMA-BENCH dataset.
To facilitate multimodal understanding, the researchers design a multimodal prompt encoder that augments a pretrained language model with a residual connection to the visual input. This allows the model to learn the dependencies among the various action dimensions. The VIP-LLAVA approach is used to enhance the model's multimodal capabilities.
Empirically, the researchers evaluate their framework on the VIMA-BENCH dataset and establish a new state-of-the-art, with a 10% improvement in success rate compared to previous approaches. Additionally, the model demonstrates remarkable in-context learning abilities, quickly adapting to new tasks with just a few examples.
Critical Analysis
The paper presents a compelling approach to addressing the challenge of multimodal prompt understanding for robots. The two-stage training pipeline and the multimodal prompt encoder design are well-justified and appear to be effective in improving the robots' performance on the VIMA-BENCH benchmark.
However, the paper does not provide much discussion on the limitations or potential issues with the proposed framework. For example, it would be interesting to know how the model's performance scales with the complexity of the tasks or the diversity of the training data. Additionally, the paper does not explore the generalization capabilities of the model beyond the VIMA-BENCH dataset, which could be an important consideration for real-world deployment.
Furthermore, the paper could have delved deeper into the specific architectural choices and design decisions that led to the model's strong in-context learning abilities. Understanding these details could provide valuable insights for developing more adaptable and versatile robotic systems.
Overall, the research presented in this paper represents an important step forward in the field of multimodal prompt understanding for robots. However, further exploration of the framework's limitations and potential for broader applicability could strengthen the impact and significance of the work.
Conclusion
This paper introduces an effective framework for training robots to understand and follow multimodal prompts, which combine vision signals and text descriptions. The researchers developed a two-stage training pipeline and a novel multimodal prompt encoder to facilitate the robots' learning of the interconnection between visual and language inputs.
The empirical evaluation on the VIMA-BENCH dataset demonstrates the efficacy of the proposed approach, with a 10% improvement in success rate compared to previous methods. Additionally, the model exhibits remarkable in-context learning abilities, quickly adapting to new tasks with just a few examples.
While the paper does not delve deeply into the limitations or broader implications of the research, the presented framework represents a significant advancement in the field of multimodal prompt understanding for robotics. This work lays the groundwork for the development of more adaptable and versatile robotic systems that can seamlessly integrate and comprehend diverse sensory inputs, ultimately enabling them to operate more effectively in complex, real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🎲
0
Mastering Robot Manipulation with Multimodal Prompts through Pretraining and Multi-task Fine-tuning
Jiachen Li, Qiaozi Gao, Michael Johnston, Xiaofeng Gao, Xuehai He, Suhaila Shakiah, Hangjie Shi, Reza Ghanadan, William Yang Wang
Prompt-based learning has been demonstrated as a compelling paradigm contributing to large language models' tremendous success (LLMs). Inspired by their success in language tasks, existing research has leveraged LLMs in embodied instruction following and task planning. In this work, we tackle the problem of training a robot to understand multimodal prompts, interleaving vision signals with text descriptions. This type of task poses a major challenge to robots' capability to understand the interconnection and complementarity between vision and language signals. In this work, we introduce an effective framework that learns a policy to perform robot manipulation with multimodal prompts from multi-task expert trajectories. Our methods consist of a two-stage training pipeline that performs inverse dynamics pretraining and multi-task finetuning. To facilitate multimodal understanding, we design our multimodal prompt encoder by augmenting a pretrained LM with a residual connection to the visual input and model the dependencies among action dimensions. Empirically, we evaluate the efficacy of our method on the VIMA-BENCH and establish a new state-of-the-art (10% improvement in success rate). Moreover, we demonstrate that our model exhibits remarkable in-context learning ability. Project page: url{https://midas-icml.github.io/}.
Read more5/29/2024

0
Affordance-Guided Reinforcement Learning via Visual Prompting
Olivia Y. Lee, Annie Xie, Kuan Fang, Karl Pertsch, Chelsea Finn
Robots equipped with reinforcement learning (RL) have the potential to learn a wide range of skills solely from a reward signal. However, obtaining a robust and dense reward signal for general manipulation tasks remains a challenge. Existing learning-based approaches require significant data, such as demonstrations or examples of success and failure, to learn task-specific reward functions. Recently, there is also a growing adoption of large multi-modal foundation models for robotics. These models can perform visual reasoning in physical contexts and generate coarse robot motions for various manipulation tasks. Motivated by this range of capability, in this work, we propose and study rewards shaped by vision-language models (VLMs). State-of-the-art VLMs have demonstrated an impressive ability to reason about affordances through keypoints in zero-shot, and we leverage this to define dense rewards for robotic learning. On a real-world manipulation task specified by natural language description, we find that these rewards improve the sample efficiency of autonomous RL and enable successful completion of the task in 20K online finetuning steps. Additionally, we demonstrate the robustness of the approach to reductions in the number of in-domain demonstrations used for pretraining, reaching comparable performance in 35K online finetuning steps.
Read more7/16/2024
🔍
0
Multi-Prompt with Depth Partitioned Cross-Modal Learning
Yingjie Tian, Yiqi Wang, Xianda Guo, Zheng Zhu, Long Chen
In recent years, soft prompt learning methods have been proposed to fine-tune large-scale vision-language pre-trained models for various downstream tasks. These methods typically combine learnable textual tokens with class tokens as input for models with frozen parameters. However, they often employ a single prompt to describe class contexts, failing to capture categories' diverse attributes adequately. This study introduces the Partitioned Multi-modal Prompt (PMPO), a multi-modal prompting technique that extends the soft prompt from a single learnable prompt to multiple prompts. Our method divides the visual encoder depths and connects learnable prompts to the separated visual depths, enabling different prompts to capture the hierarchical contextual depths of visual representations. Furthermore, to maximize the advantages of multi-prompt learning, we incorporate prior information from manually designed templates and learnable multi-prompts, thus improving the generalization capabilities of our approach. We evaluate the effectiveness of our approach on three challenging tasks: new class generalization, cross-dataset evaluation, and domain generalization. For instance, our method achieves a $79.28$ harmonic mean, averaged over 11 diverse image recognition datasets ($+7.62$ compared to CoOp), demonstrating significant competitiveness compared to state-of-the-art prompting methods.
Read more5/1/2024
0
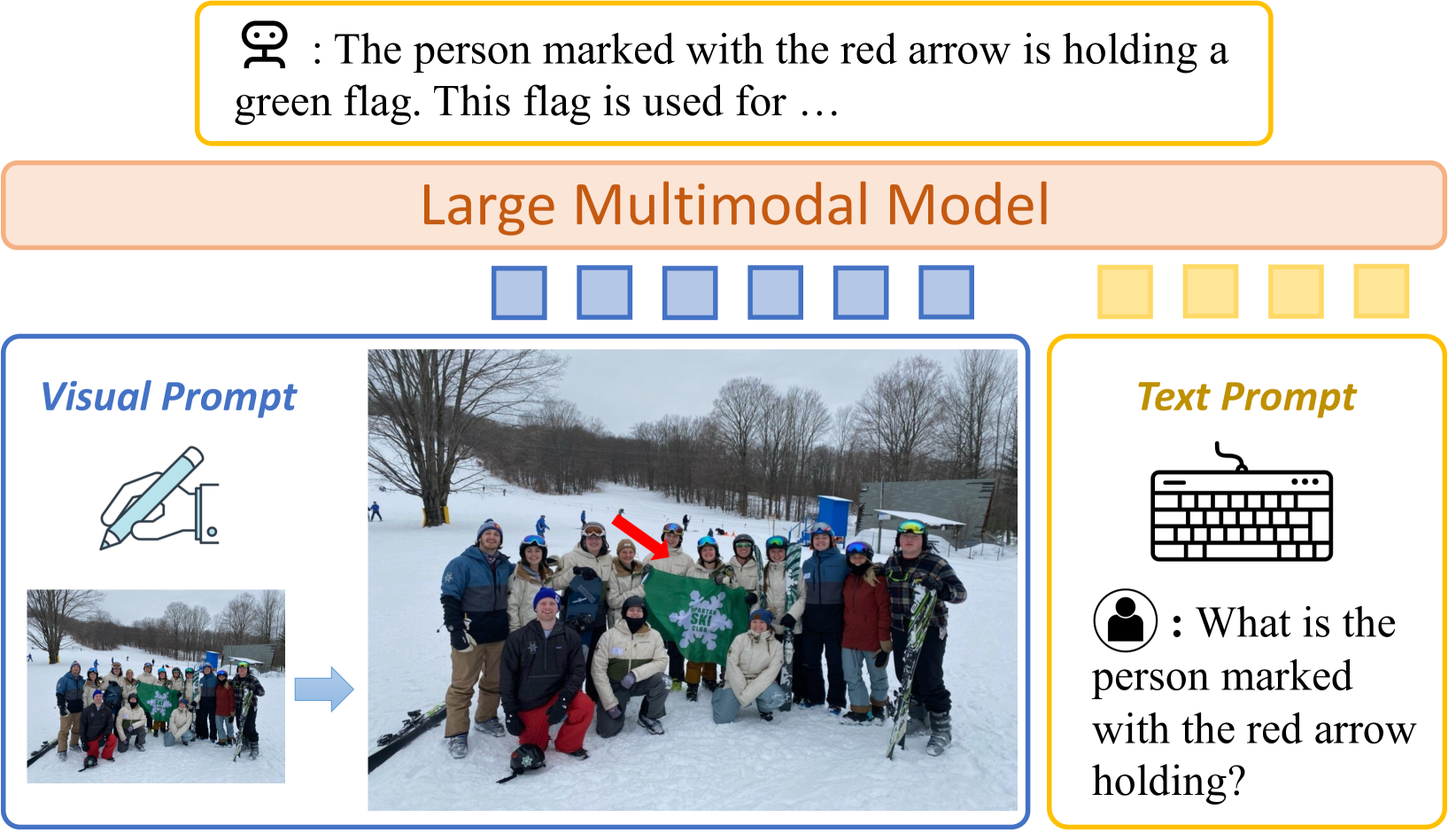
ViP-LLaVA: Making Large Multimodal Models Understand Arbitrary Visual Prompts
Mu Cai, Haotian Liu, Dennis Park, Siva Karthik Mustikovela, Gregory P. Meyer, Yuning Chai, Yong Jae Lee
While existing large vision-language multimodal models focus on whole image understanding, there is a prominent gap in achieving region-specific comprehension. Current approaches that use textual coordinates or spatial encodings often fail to provide a user-friendly interface for visual prompting. To address this challenge, we introduce a novel multimodal model capable of decoding arbitrary visual prompts. This allows users to intuitively mark images and interact with the model using natural cues like a red bounding box or pointed arrow. Our simple design directly overlays visual markers onto the RGB image, eliminating the need for complex region encodings, yet achieves state-of-the-art performance on region-understanding tasks like Visual7W, PointQA, and Visual Commonsense Reasoning benchmark. Furthermore, we present ViP-Bench, a comprehensive benchmark to assess the capability of models in understanding visual prompts across multiple dimensions, enabling future research in this domain. Code, data, and model are publicly available.
Read more4/30/2024