A Model for Optimal Resilient Planning Subject to Fallible Actuators

0

Sign in to get full access
Overview
- This paper presents a model for optimal resilient planning in the presence of fallible actuators, which are devices that convert electrical signals into physical motion.
- The researchers develop a framework to plan optimal trajectories that account for potential actuator failures, aiming to minimize the impact of such failures on the system's performance.
- The proposed approach combines model predictive control, Bayesian inference, and robust optimization techniques to generate resilient plans.
- The authors demonstrate the effectiveness of their model through simulations and experiments on a robotic platform.
Plain English Explanation
The paper focuses on a common challenge in robotics and other systems that rely on physical actuators - the potential for these actuators to fail or malfunction. [This relates to the research on conformal prediction for motion control performance in automated vehicles and future predictive success or failure classification for long-horizon tasks.]
The researchers developed a model that can plan optimal paths or trajectories for a robot or other system, while also accounting for the possibility that its actuators (the parts that cause physical movement) might not work perfectly. The goal is to make the system more resilient and able to continue functioning effectively even if some of its actuators fail.
The key idea is to use a combination of techniques, including model predictive control, Bayesian inference, and robust optimization. This allows the system to anticipate potential actuator failures, estimate the likelihood of different failure modes, and plan trajectories that are optimized to be as robust as possible to these failures. [This relates to the research on actor-critic model predictive control and adaptable recovery behaviors in robotics using behavior trees and motion planning.]
The researchers tested their approach through simulations and experiments on a robotic platform, demonstrating its effectiveness in maintaining good performance even when some actuators fail. This kind of resilient planning could be valuable in a wide range of applications, from industrial robotics to autonomous vehicles, where the reliability and fault-tolerance of the underlying systems is crucial.
Technical Explanation
The paper presents a framework for optimal resilient planning in the presence of fallible actuators. The key components of the approach are:
-
Model Predictive Control (MPC): The researchers use MPC to generate optimal trajectories for the system, taking into account the current state and a model of the system dynamics.
-
Bayesian Inference: A Bayesian framework is used to estimate the likelihood of different actuator failure modes, based on observed data and prior knowledge about the system.
-
Robust Optimization: The trajectory optimization problem is formulated as a robust optimization problem, which seeks to find the best plan that minimizes the expected cost under the most likely failure scenarios.
The researchers demonstrate their approach on a robotic platform, where they simulate various actuator failure scenarios and compare the performance of the resilient planning method to a baseline approach that does not account for potential failures.
The results show that the proposed resilient planning framework is able to generate trajectories that maintain better performance compared to the baseline, even when significant actuator failures occur. This is achieved by anticipating potential failures and proactively planning trajectories that are more robust to these failures.
Critical Analysis
The paper presents a well-designed and thorough approach to the challenging problem of resilient planning in the presence of fallible actuators. The combination of MPC, Bayesian inference, and robust optimization is a clever and principled way to address this issue.
One potential limitation of the work is the reliance on a priori knowledge about the actuator failure modes and their probabilities. In real-world scenarios, this information may not be readily available, and the system would need to learn and adapt to failure modes over time. [This relates to the research on synergizing human-like responses in machine intelligence planning.]
Additionally, the paper focuses on a single robotic platform, and it would be interesting to see how the approach generalizes to other systems with different actuator configurations and failure modes. Further empirical validation on a wider range of applications could help establish the broader applicability of the proposed framework.
Overall, this is a well-executed piece of research that makes a valuable contribution to the field of resilient planning and control. The authors have demonstrated a promising approach that could have significant practical implications in a variety of domains.
Conclusion
This paper presents a novel framework for optimal resilient planning in the presence of fallible actuators. By combining model predictive control, Bayesian inference, and robust optimization techniques, the researchers have developed a systematic approach to generating trajectories that are resilient to potential actuator failures.
The proposed method has been validated through simulations and experiments on a robotic platform, demonstrating its ability to maintain good system performance even when significant actuator failures occur. This work represents an important step forward in building more reliable and fault-tolerant robotic and autonomous systems, with potential applications in areas such as industrial automation, transportation, and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Model for Optimal Resilient Planning Subject to Fallible Actuators
Kyle Baldes, Diptanil Chaudhuri, Jason M. O'Kane, Dylan A. Shell
Robots incurring component failures ought to adapt their behavior to best realize still-attainable goals under reduced capacity. We formulate the problem of planning with actuators known a priori to be susceptible to failure within the Markov Decision Processes (MDP) framework. The model captures utilization-driven malfunction and state-action dependent likelihoods of actuator failure in order to enable reasoning about potential impairment and the long-term implications of impoverished future control. This leads to behavior differing qualitatively from plans which ignore failure. As actuators malfunction, there are combinatorially many configurations which can arise. We identify opportunities to save computation through re-use, exploiting the observation that differing configurations yield closely related problems. Our results show how strategic solutions are obtained so robots can respond when failures do occur -- for instance, in prudently scheduling utilization in order to keep critical actuators in reserve.
Read more5/21/2024
🔮
0
Conformal Prediction of Motion Control Performance for an Automated Vehicle in Presence of Actuator Degradations and Failures
Richard Schubert, Marvin Loba, Jasper Sunnemann, Torben Stolte, Markus Maurer
Automated driving systems require monitoring mechanisms to ensure safe operation, especially if system components degrade or fail. Their runtime self-representation plays a key role as it provides a-priori knowledge about the system's capabilities and limitations. In this paper, we propose a data-driven approach for deriving such a self-representation model for the motion controller of an automated vehicle. A conformalized prediction model is learned and allows estimating how operational conditions as well as potential degradations and failures of the vehicle's actuators impact motion control performance. During runtime behavior generation, our predictor can provide a heuristic for determining the admissible action space.
Read more7/30/2024

0
Future Predictive Success-or-Failure Classification for Long-Horizon Robotic Tasks
Naoya Sogi, Hiroyuki Oyama, Takashi Shibata, Makoto Terao
Automating long-horizon tasks with a robotic arm has been a central research topic in robotics. Optimization-based action planning is an efficient approach for creating an action plan to complete a given task. Construction of a reliable planning method requires a design process of conditions, e.g., to avoid collision between objects. The design process, however, has two critical issues: 1) iterative trials--the design process is time-consuming due to the trial-and-error process of modifying conditions, and 2) manual redesign--it is difficult to cover all the necessary conditions manually. To tackle these issues, this paper proposes a future-predictive success-or-failure-classification method to obtain conditions automatically. The key idea behind the proposed method is an end-to-end approach for determining whether the action plan can complete a given task instead of manually redesigning the conditions. The proposed method uses a long-horizon future-prediction method to enable success-or-failure classification without the execution of an action plan. This paper also proposes a regularization term called transition consistency regularization to provide easy-to-predict feature distribution. The regularization term improves future prediction and classification performance. The effectiveness of our method is demonstrated through classification and robotic-manipulation experiments.
Read more4/5/2024
0
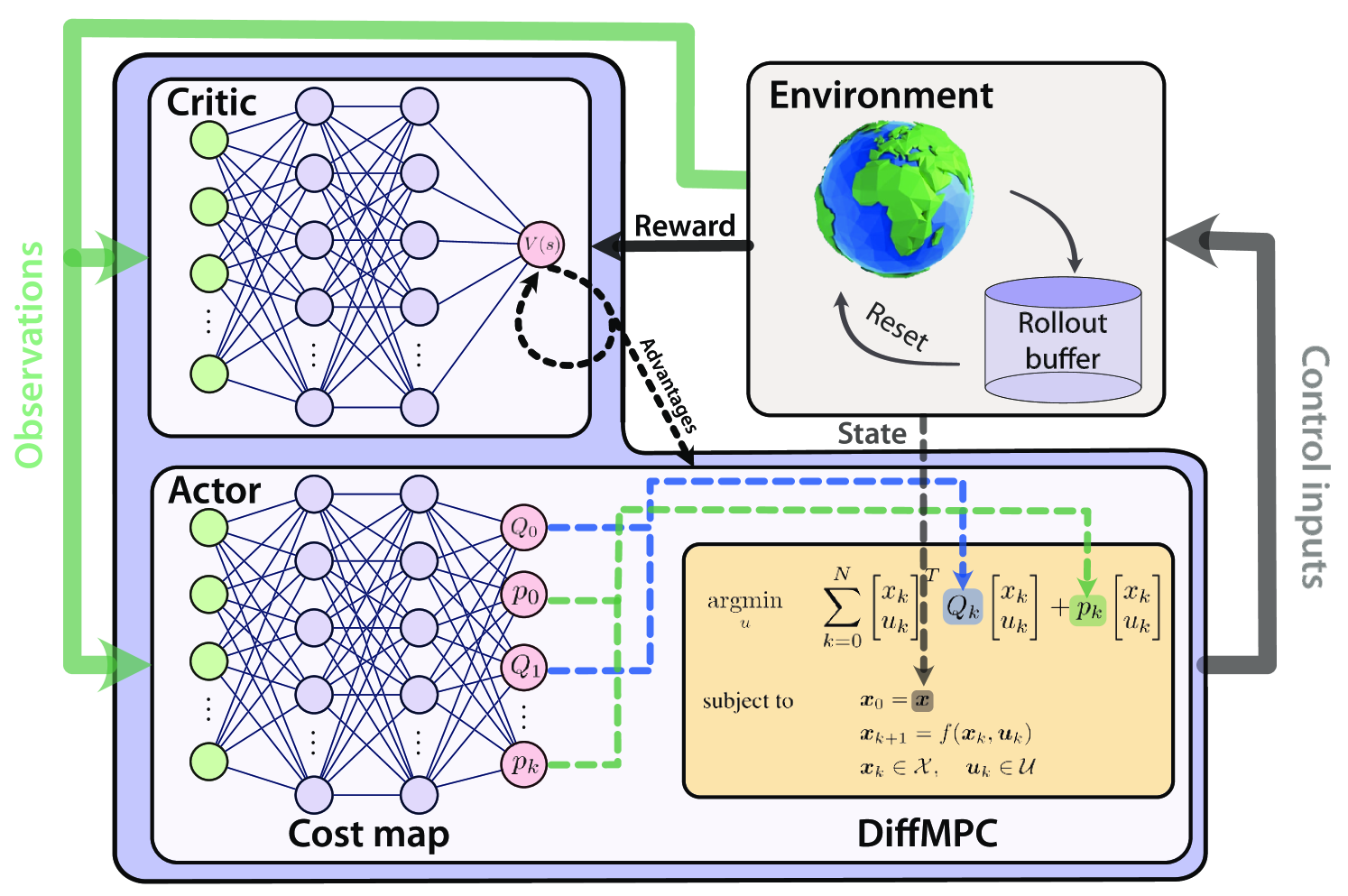
Actor-Critic Model Predictive Control
Angel Romero, Yunlong Song, Davide Scaramuzza
An open research question in robotics is how to combine the benefits of model-free reinforcement learning (RL) - known for its strong task performance and flexibility in optimizing general reward formulations - with the robustness and online replanning capabilities of model predictive control (MPC). This paper provides an answer by introducing a new framework called Actor-Critic Model Predictive Control. The key idea is to embed a differentiable MPC within an actor-critic RL framework. The proposed approach leverages the short-term predictive optimization capabilities of MPC with the exploratory and end-to-end training properties of RL. The resulting policy effectively manages both short-term decisions through the MPC-based actor and long-term prediction via the critic network, unifying the benefits of both model-based control and end-to-end learning. We validate our method in both simulation and the real world with a quadcopter platform across various high-level tasks. We show that the proposed architecture can achieve real-time control performance, learn complex behaviors via trial and error, and retain the predictive properties of the MPC to better handle out of distribution behaviour.
Read more4/15/2024