Model Predictive Simulation Using Structured Graphical Models and Transformers
2406.19635
0
0

Abstract
We propose an approach to simulating trajectories of multiple interacting agents (road users) based on transformers and probabilistic graphical models (PGMs), and apply it to the Waymo SimAgents challenge. The transformer baseline is based on the MTR model, which predicts multiple future trajectories conditioned on the past trajectories and static road layout features. We then improve upon these generated trajectories using a PGM, which contains factors which encode prior knowledge, such as a preference for smooth trajectories, and avoidance of collisions with static obstacles and other moving agents. We perform (approximate) MAP inference in this PGM using the Gauss-Newton method. Finally we sample $K=32$ trajectories for each of the $N sim 100$ agents for the next $T=8 Delta$ time steps, where $Delta=10$ is the sampling rate per second. Following the Model Predictive Control (MPC) paradigm, we only return the first element of our forecasted trajectories at each step, and then we replan, so that the simulation can constantly adapt to its changing environment. We therefore call our approach Model Predictive Simulation or MPS. We show that MPS improves upon the MTR baseline, especially in safety critical metrics such as collision rate. Furthermore, our approach is compatible with any underlying forecasting model, and does not require extra training, so we believe it is a valuable contribution to the community.
Create account to get full access
Overview
- This paper presents a novel approach for model predictive simulation using structured graphical models and transformers.
- The proposed method combines the strengths of structured graphical models and transformer architectures to enable efficient and accurate simulation of complex systems.
- Key innovations include the use of a hierarchical graphical model to capture the inherent structure of the system, and the integration of transformer modules to learn high-level representations and long-range dependencies.
Plain English Explanation
The paper introduces a new technique for simulating the behavior of complex systems over time. It combines two powerful machine learning approaches: structured graphical models and transformer models.
Structured graphical models are a way to represent the underlying structure of a system, capturing how different components interact with each other. This helps the model better understand the system's dynamics and make more accurate predictions.
Transformers, on the other hand, are a type of neural network that excel at learning long-range dependencies in data. By integrating transformer modules, the proposed method can capture high-level patterns and relationships in the simulation data, further improving the accuracy of the predictions.
The key innovation is bringing these two complementary techniques together to create a more powerful simulation model. The structured graphical component ensures the model respects the inherent structure of the system, while the transformer component allows it to learn complex, high-level patterns in the data.
This combined approach could lead to significant improvements in the ability to simulate and predict the behavior of a wide range of complex systems, from ControlMTR: Control-guided Motion Transformer for Scene-Compliant Trajectory Prediction to BehaviorGPT: Smart Agent Simulation for Autonomous Driving and Beyond.
Technical Explanation
The proposed method uses a hierarchical structured graphical model to capture the inherent structure of the system being simulated. This graphical model represents the different components of the system and the relationships between them. The model is then integrated with transformer modules, which are used to learn high-level representations and long-range dependencies in the simulation data.
The transformer modules are applied at multiple levels of the hierarchical graphical model, allowing the model to capture both the local interactions and the global, long-range patterns in the system's behavior. This combination of structured graphical modeling and transformer-based learning enables the model to make accurate predictions of the system's future state, even in complex and highly interdependent scenarios.
The authors evaluate the proposed approach on a variety of simulation tasks, including Transfer Learning Study on Motion Transformer-based Trajectory Prediction and TrajeGlish: Traffic Modeling as Next Token Prediction. The results demonstrate significant improvements in simulation accuracy and efficiency compared to existing methods, showcasing the potential of this combined approach for a wide range of applications.
Critical Analysis
The paper presents a compelling and well-designed approach to model predictive simulation, but there are a few potential limitations and areas for further research:
-
The authors note that the performance of the proposed method may be sensitive to the quality and completeness of the underlying graphical model. Developing robust techniques for automatically constructing accurate graphical representations of complex systems could be an important area for future work.
-
While the integration of transformer modules enhances the model's ability to capture long-range dependencies, the computational overhead of these modules may limit the scalability of the approach, especially for real-time simulation tasks. Exploring ways to further optimize the model's efficiency could be valuable.
-
The paper focuses on the simulation of generic complex systems, but the authors do not provide a detailed analysis of the method's performance on specific application domains, such as Planning Adaptive World Models for Autonomous Driving. Further research on the adaptability and generalizability of the approach to different problem contexts would be informative.
Overall, the proposed method represents a promising step forward in the field of model predictive simulation, combining the strengths of structured graphical modeling and transformer-based learning. As the authors continue to refine and expand upon this work, it could lead to significant advancements in the ability to simulate and predict the behavior of complex, real-world systems.
Conclusion
This paper introduces a novel approach for model predictive simulation that integrates structured graphical models and transformer architectures. By leveraging the strengths of both techniques, the proposed method can capture the inherent structure of complex systems while also learning high-level representations and long-range dependencies in the simulation data.
The results demonstrate significant improvements in simulation accuracy and efficiency compared to existing methods, suggesting that this combined approach could have broad applications in fields ranging from autonomous systems to industrial process optimization. As the authors continue to refine and build upon this work, it has the potential to drive transformative advancements in the ability to simulate and predict the behavior of complex, real-world systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Transfer Learning Study of Motion Transformer-based Trajectory Predictions
Lars Ullrich, Alex McMaster, Knut Graichen
0
0
Trajectory planning in autonomous driving is highly dependent on predicting the emergent behavior of other road users. Learning-based methods are currently showing impressive results in simulation-based challenges, with transformer-based architectures technologically leading the way. Ultimately, however, predictions are needed in the real world. In addition to the shifts from simulation to the real world, many vehicle- and country-specific shifts, i.e. differences in sensor systems, fusion and perception algorithms as well as traffic rules and laws, are on the agenda. Since models that can cover all system setups and design domains at once are not yet foreseeable, model adaptation plays a central role. Therefore, a simulation-based study on transfer learning techniques is conducted on basis of a transformer-based model. Furthermore, the study aims to provide insights into possible trade-offs between computational time and performance to support effective transfers into the real world.
4/15/2024
BehaviorGPT: Smart Agent Simulation for Autonomous Driving with Next-Patch Prediction
Zikang Zhou, Haibo Hu, Xinhong Chen, Jianping Wang, Nan Guan, Kui Wu, Yung-Hui Li, Yu-Kai Huang, Chun Jason Xue
0
0
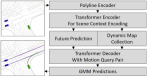
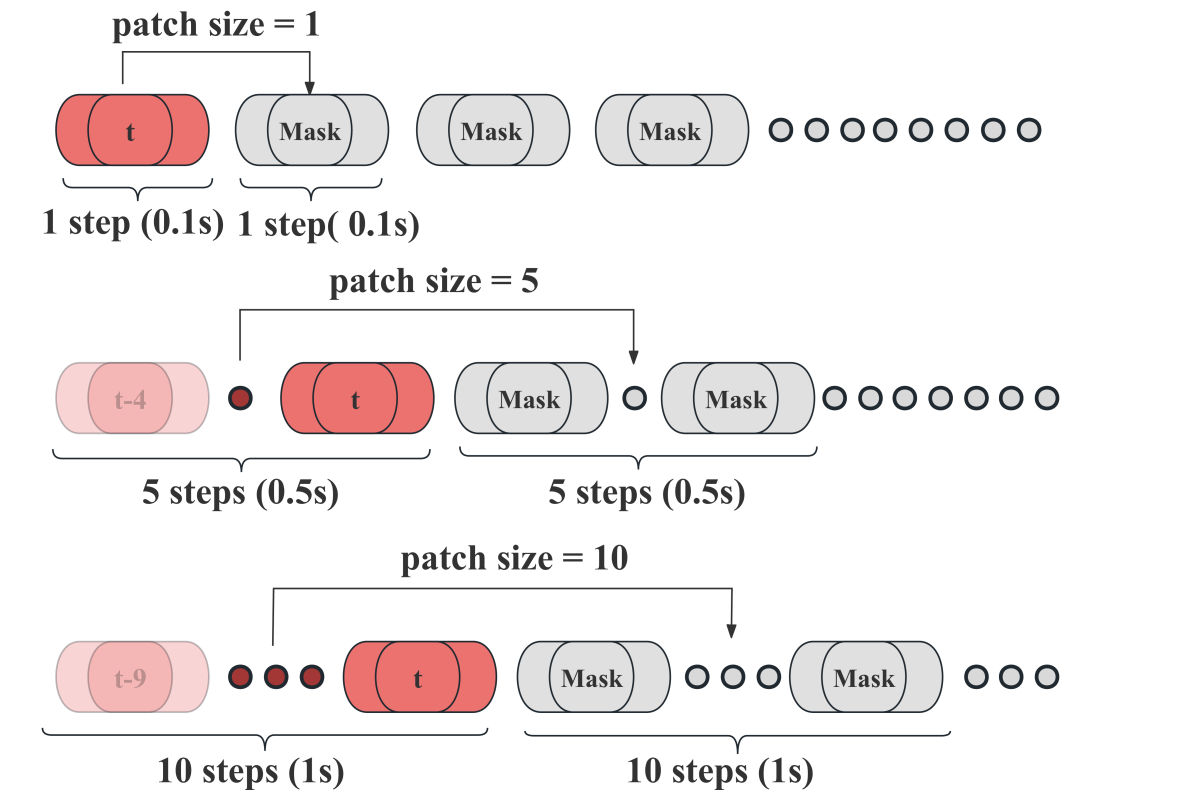
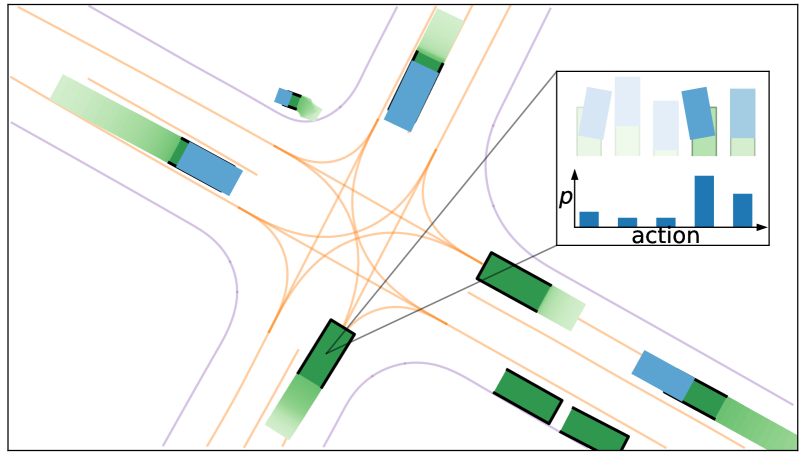
Simulating realistic interactions among traffic agents is crucial for efficiently validating the safety of autonomous driving systems. Existing leading simulators primarily use an encoder-decoder structure to encode the historical trajectories for future simulation. However, such a paradigm complicates the model architecture, and the manual separation of history and future trajectories leads to low data utilization. To address these challenges, we propose Behavior Generative Pre-trained Transformers (BehaviorGPT), a decoder-only, autoregressive architecture designed to simulate the sequential motion of multiple agents. Crucially, our approach discards the traditional separation between history and future, treating each time step as the current one, resulting in a simpler, more parameter- and data-efficient design that scales seamlessly with data and computation. Additionally, we introduce the Next-Patch Prediction Paradigm (NP3), which enables models to reason at the patch level of trajectories and capture long-range spatial-temporal interactions. BehaviorGPT ranks first across several metrics on the Waymo Sim Agents Benchmark, demonstrating its exceptional performance in multi-agent and agent-map interactions. We outperformed state-of-the-art models with a realism score of 0.741 and improved the minADE metric to 1.540, with an approximately 91.6% reduction in model parameters.
5/28/2024

ControlMTR: Control-Guided Motion Transformer with Scene-Compliant Intention Points for Feasible Motion Prediction
Jiawei Sun, Chengran Yuan, Shuo Sun, Shanze Wang, Yuhang Han, Shuailei Ma, Zefan Huang, Anthony Wong, Keng Peng Tee, Marcelo H. Ang Jr
0
0
The ability to accurately predict feasible multimodal future trajectories of surrounding traffic participants is crucial for behavior planning in autonomous vehicles. The Motion Transformer (MTR), a state-of-the-art motion prediction method, alleviated mode collapse and instability during training and enhanced overall prediction performance by replacing conventional dense future endpoints with a small set of fixed prior motion intention points. However, the fixed prior intention points make the MTR multi-modal prediction distribution over-scattered and infeasible in many scenarios. In this paper, we propose the ControlMTR framework to tackle the aforementioned issues by generating scene-compliant intention points and additionally predicting driving control commands, which are then converted into trajectories by a simple kinematic model with soft constraints. These control-generated trajectories will guide the directly predicted trajectories by an auxiliary loss function. Together with our proposed scene-compliant intention points, they can effectively restrict the prediction distribution within the road boundaries and suppress infeasible off-road predictions while enhancing prediction performance. Remarkably, without resorting to additional model ensemble techniques, our method surpasses the baseline MTR model across all performance metrics, achieving notable improvements of 5.22% in SoftmAP and a 4.15% reduction in MissRate. Our approach notably results in a 41.85% reduction in the cross-boundary rate of the MTR, effectively ensuring that the prediction distribution is confined within the drivable area.
4/17/2024
Trajeglish: Traffic Modeling as Next-Token Prediction
Jonah Philion, Xue Bin Peng, Sanja Fidler
0
0
A longstanding challenge for self-driving development is simulating dynamic driving scenarios seeded from recorded driving logs. In pursuit of this functionality, we apply tools from discrete sequence modeling to model how vehicles, pedestrians and cyclists interact in driving scenarios. Using a simple data-driven tokenization scheme, we discretize trajectories to centimeter-level resolution using a small vocabulary. We then model the multi-agent sequence of discrete motion tokens with a GPT-like encoder-decoder that is autoregressive in time and takes into account intra-timestep interaction between agents. Scenarios sampled from our model exhibit state-of-the-art realism; our model tops the Waymo Sim Agents Benchmark, surpassing prior work along the realism meta metric by 3.3% and along the interaction metric by 9.9%. We ablate our modeling choices in full autonomy and partial autonomy settings, and show that the representations learned by our model can quickly be adapted to improve performance on nuScenes. We additionally evaluate the scalability of our model with respect to parameter count and dataset size, and use density estimates from our model to quantify the saliency of context length and intra-timestep interaction for the traffic modeling task.
4/16/2024