Motion-prior Contrast Maximization for Dense Continuous-Time Motion Estimation

0
Sign in to get full access
Overview
- This paper presents a novel method for dense continuous-time motion estimation, which aims to improve upon existing optical flow-based approaches.
- The key idea is to maximize the contrast between motion priors and actual motion, which the authors claim leads to more accurate and robust motion estimation.
- The proposed technique is evaluated on several benchmark datasets and shown to outperform state-of-the-art methods in terms of various performance metrics.
Plain English Explanation
The paper introduces a new way to estimate motion in video frames, which is an important task in computer vision with applications like self-driving cars, video stabilization, and augmented reality. Existing methods based on optical flow can struggle to accurately capture complex or fast-moving motions.
The researchers' approach tries to get around this by explicitly incorporating prior knowledge about typical object motions into the estimation process. This "motion prior" acts as a kind of reference, and the algorithm tries to maximize the difference or "contrast" between this prior and the actual motion it detects in the video.
The authors argue that this contrast maximization leads to more accurate and reliable motion estimates, which they demonstrate through experiments on standard benchmark datasets. Compared to other state-of-the-art optical flow methods, their technique appears to produce better results, especially for challenging cases like fast motion or occlusions.
The key insight is that by leveraging relevant motion priors, the algorithm can better disentangle the true object movements from potential artifacts or noise in the video. This seems to make the motion estimation more robust and closer to what a human observer would perceive.
Technical Explanation
The paper presents a novel framework for dense continuous-time motion estimation that aims to improve upon existing optical flow-based approaches. The core idea is to incorporate motion priors into the estimation process and maximize the contrast between these priors and the observed motion.
Specifically, the authors formulate the motion estimation problem as an energy minimization task, where the objective function combines a data term that measures the fit to the observed video frames, and a regularization term that encourages the estimated motion to align with pre-defined motion priors. These priors are learned from training data and capture common patterns of object movement.
The optimization is carried out in a continuous-time framework, allowing for smooth, high-fidelity motion trajectories rather than just discrete displacements between frames. This is achieved by representing the motion field as a time-varying vector field, which is parameterized using a neural network.
The authors demonstrate the effectiveness of their approach on several benchmark datasets for optical flow and related tasks, such as dense monocular motion segmentation, unsupervised motion segmentation, and amodal optical flow. Compared to state-of-the-art methods, their technique shows improved performance on a variety of metrics, particularly in challenging scenarios involving fast or complex motions.
Critical Analysis
The paper presents a thoughtful and well-designed approach to the problem of dense continuous-time motion estimation. The key innovation of leveraging motion priors to guide the estimation process is an interesting and potentially powerful idea.
However, the authors acknowledge several limitations and areas for future work. For instance, the current motion priors are learned from training data, which may not capture the full diversity of real-world motions. Extending the method to adapt the priors online or incorporate more diverse datasets could further improve its robustness and generalization.
Additionally, the continuous-time representation, while advantageous for smooth motion trajectories, may struggle to handle abrupt changes or discontinuities in the motion field. Exploring hybrid approaches that combine continuous and discrete representations could be a fruitful direction for future research.
It would also be valuable to investigate the method's performance in more real-world applications, such as ego-motion prediction or event-based visual-inertial odometry, to better understand its practical benefits and limitations.
Overall, this paper presents a promising and innovative approach to a fundamental computer vision problem. With further refinements and extensions, the authors' motion-prior contrast maximization technique could become a valuable tool in the pursuit of robust and accurate motion estimation.
Conclusion
The paper introduces a novel method for dense continuous-time motion estimation that leverages motion priors to improve upon existing optical flow-based approaches. By explicitly maximizing the contrast between the observed motion and the expected motion patterns, the technique demonstrates improved performance on several benchmark datasets, particularly for challenging scenarios involving fast or complex motions.
The key insight of the research is that incorporating relevant prior knowledge about typical object movements can help the motion estimation algorithm better disentangle true motion from potential artifacts or noise in the video. This leads to more accurate and reliable motion trajectories, with potential applications in areas like self-driving cars, video stabilization, and augmented reality.
While the paper highlights several limitations and areas for future work, the proposed motion-prior contrast maximization framework represents a promising step towards more robust and effective dense motion estimation. As computer vision algorithms continue to advance, techniques like this that combine learned priors with flexible, continuous-time representations could play an increasingly important role in unlocking new capabilities and applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
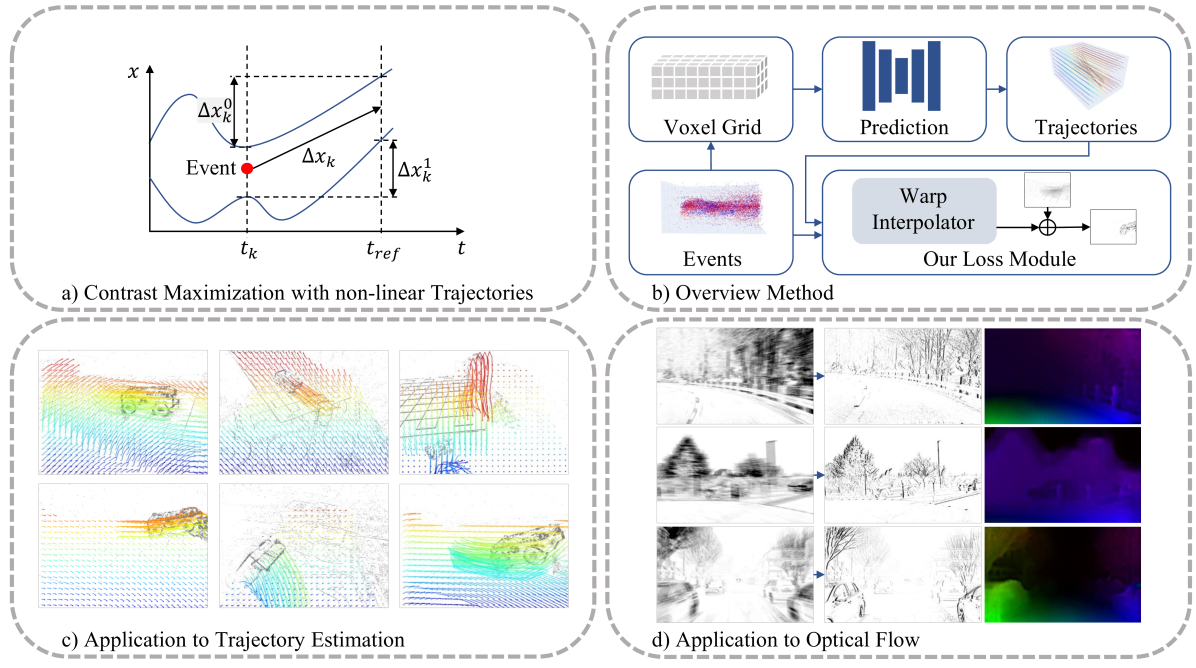
Motion-prior Contrast Maximization for Dense Continuous-Time Motion Estimation
Friedhelm Hamann, Ziyun Wang, Ioannis Asmanis, Kenneth Chaney, Guillermo Gallego, Kostas Daniilidis
Current optical flow and point-tracking methods rely heavily on synthetic datasets. Event cameras are novel vision sensors with advantages in challenging visual conditions, but state-of-the-art frame-based methods cannot be easily adapted to event data due to the limitations of current event simulators. We introduce a novel self-supervised loss combining the Contrast Maximization framework with a non-linear motion prior in the form of pixel-level trajectories and propose an efficient solution to solve the high-dimensional assignment problem between non-linear trajectories and events. Their effectiveness is demonstrated in two scenarios: In dense continuous-time motion estimation, our method improves the zero-shot performance of a synthetically trained model on the real-world dataset EVIMO2 by 29%. In optical flow estimation, our method elevates a simple UNet to achieve state-of-the-art performance among self-supervised methods on the DSEC optical flow benchmark. Our code is available at https://github.com/tub-rip/MotionPriorCMax.
Read more7/16/2024

0
Secrets of Edge-Informed Contrast Maximization for Event-Based Vision
Pritam P. Karmokar, Quan H. Nguyen, William J. Beksi
Event cameras capture the motion of intensity gradients (edges) in the image plane in the form of rapid asynchronous events. When accumulated in 2D histograms, these events depict overlays of the edges in motion, consequently obscuring the spatial structure of the generating edges. Contrast maximization (CM) is an optimization framework that can reverse this effect and produce sharp spatial structures that resemble the moving intensity gradients by estimating the motion trajectories of the events. Nonetheless, CM is still an underexplored area of research with avenues for improvement. In this paper, we propose a novel hybrid approach that extends CM from uni-modal (events only) to bi-modal (events and edges). We leverage the underpinning concept that, given a reference time, optimally warped events produce sharp gradients consistent with the moving edge at that time. Specifically, we formalize a correlation-based objective to aid CM and provide key insights into the incorporation of multiscale and multireference techniques. Moreover, our edge-informed CM method yields superior sharpness scores and establishes new state-of-the-art event optical flow benchmarks on the MVSEC, DSEC, and ECD datasets.
Read more9/24/2024

0
Dense Monocular Motion Segmentation Using Optical Flow and Pseudo Depth Map: A Zero-Shot Approach
Yuxiang Huang, Yuhao Chen, John Zelek
Motion segmentation from a single moving camera presents a significant challenge in the field of computer vision. This challenge is compounded by the unknown camera movements and the lack of depth information of the scene. While deep learning has shown impressive capabilities in addressing these issues, supervised models require extensive training on massive annotated datasets, and unsupervised models also require training on large volumes of unannotated data, presenting significant barriers for both. In contrast, traditional methods based on optical flow do not require training data, however, they often fail to capture object-level information, leading to over-segmentation or under-segmentation. In addition, they also struggle in complex scenes with substantial depth variations and non-rigid motion, due to the overreliance of optical flow. To overcome these challenges, we propose an innovative hybrid approach that leverages the advantages of both deep learning methods and traditional optical flow based methods to perform dense motion segmentation without requiring any training. Our method initiates by automatically generating object proposals for each frame using foundation models. These proposals are then clustered into distinct motion groups using both optical flow and relative depth maps as motion cues. The integration of depth maps derived from state-of-the-art monocular depth estimation models significantly enhances the motion cues provided by optical flow, particularly in handling motion parallax issues. Our method is evaluated on the DAVIS-Moving and YTVOS-Moving datasets, and the results demonstrate that our method outperforms the best unsupervised method and closely matches with the state-of-theart supervised methods.
Read more6/28/2024

0
Motion and Structure from Event-based Normal Flow
Zhongyang Ren, Bangyan Liao, Delei Kong, Jinghang Li, Peidong Liu, Laurent Kneip, Guillermo Gallego, Yi Zhou
Recovering the camera motion and scene geometry from visual data is a fundamental problem in the field of computer vision. Its success in standard vision is attributed to the maturity of feature extraction, data association and multi-view geometry. The recent emergence of neuromorphic event-based cameras places great demands on approaches that use raw event data as input to solve this fundamental problem.Existing state-of-the-art solutions typically infer implicitly data association by iteratively reversing the event data generation process. However, the nonlinear nature of these methods limits their applicability in real-time tasks, and the constant-motion assumption leads to unstable results under agile motion. To this end, we rethink the problem formulation in a way that aligns better with the differential working principle of event cameras.We show that the event-based normal flow can be used, via the proposed geometric error term, as an alternative to the full flow in solving a family of geometric problems that involve instantaneous first-order kinematics and scene geometry. Furthermore, we develop a fast linear solver and a continuous-time nonlinear solver on top of the proposed geometric error term.Experiments on both synthetic and real data show the superiority of our linear solver in terms of accuracy and efficiency, and indicate its complementary feature as an initialization method for existing nonlinear solvers. Besides, our continuous-time non-linear solver exhibits exceptional capability in accommodating sudden variations in motion since it does not rely on the constant-motion assumption.
Read more7/22/2024