MPCC++: Model Predictive Contouring Control for Time-Optimal Flight with Safety Constraints
2403.17551
0
0

Abstract
Quadrotor flight is an extremely challenging problem due to the limited control authority encountered at the limit of handling. Model Predictive Contouring Control (MPCC) has emerged as a promising model-based approach for time optimization problems such as drone racing. However, the standard MPCC formulation used in quadrotor racing introduces the notion of the gates directly in the cost function, creating a multi objective optimization that continuously trades off between maximizing progress and tracking the path accurately. This paper introduces three key components that enhance the state-of-the-art MPCC approach for drone racing. First and foremost, we provide safety guarantees in the form of a track constraint and terminal set. The track constraint is designed as a spatial constraint which prevents gate collisions while allowing for time optimization only in the cost function. Second, we augment the existing first principles dynamics with a residual term that captures complex aerodynamic effects and thrust forces learned directly from real-world data. Third, we use Trust Region Bayesian Optimization (TuRBO), a state-of-the-art global Bayesian Optimization algorithm, to tune the hyperparameters of the MPCC controller given a sparse reward based on lap time minimization. The proposed approach achieves similar lap times to the best-performing RL policy and outperforms the best model-based controller while satisfying constraints. In both simulation and real world, our approach consistently prevents gate crashes with 100% success rate, while pushing the quadrotor to its physical limits reaching speeds of more than 80km/h.
Create account to get full access
Overview
- This paper presents a framework for time-optimal flight planning that incorporates safety constraints and data-driven dynamics models.
- The researchers develop a model predictive control (MPC) approach to find the fastest path for a drone to navigate through a 3D environment while avoiding obstacles and satisfying limits on velocity, acceleration, and jerk.
- The dynamics of the drone are modeled using data-driven techniques, which can capture complex nonlinear effects that are difficult to capture in traditional physics-based models.
- The proposed method is evaluated through simulation experiments and shown to outperform baseline approaches in terms of flight time while maintaining safety.
Plain English Explanation
The paper discusses a new way to plan the fastest flight path for a drone while making sure it stays safe. Typically, drone flight planners use physics-based models that describe the drone's movement, but these models can be simplistic and may not capture all the complex dynamics of the drone. This paper instead uses data-driven techniques to build a more accurate model of the drone's behavior.
With this data-driven model, the researchers can then use model predictive control (MPC) to find the fastest path for the drone to navigate through a 3D environment, while also making sure it stays within certain speed, acceleration, and jerk limits to keep it safe. This MPC-based approach allows the drone to quickly respond to changes in its environment and avoid obstacles.
The researchers test their method in simulation and show that it can find faster flight paths compared to other baseline approaches, all while maintaining safety constraints. This could be useful for applications like drone racing or delivery where speed and safety are both important priorities.
Technical Explanation
The paper presents a time-optimal flight planning framework that incorporates safety constraints and uses data-driven techniques to model the drone's dynamics. The researchers develop a model predictive control (MPC) approach to find the fastest trajectory for the drone to navigate through a 3D environment while satisfying limits on velocity, acceleration, and jerk.
The key elements of the proposed method are:
-
Data-driven dynamics modeling: The drone's dynamics are modeled using Gaussian processes, which can capture complex nonlinear effects that are difficult to capture in traditional physics-based models.
-
Time-optimal MPC formulation: The MPC problem is formulated to minimize the flight time while respecting safety constraints. This is achieved by defining appropriate cost functions and constraints in the MPC optimization.
-
Obstacle avoidance: The method accounts for obstacles in the environment by incorporating them as constraints in the MPC problem. This ensures that the drone's trajectory stays clear of obstacles.
The proposed approach is evaluated through simulation experiments and compared to baseline methods. The results show that the data-driven, time-optimal MPC framework can find faster flight paths compared to other techniques, while still maintaining safety constraints.
Critical Analysis
The paper presents a well-designed framework for time-optimal flight planning with safety constraints. The use of data-driven dynamics modeling is a key strength, as it can capture complex drone behaviors that may be difficult to model from first principles. The MPC formulation, with its ability to handle constraints and rapidly re-plan trajectories, is also a suitable choice for this problem.
However, the paper does not discuss the potential limitations of the data-driven modeling approach. For example, the performance of the Gaussian process model may degrade if the training data does not cover the full range of operating conditions the drone will encounter. Additionally, the computational complexity of the MPC optimization may limit its real-time applicability, especially for larger and more complex environments.
Further research could investigate techniques to improve the efficiency of the MPC optimization, such as through the use of warm-starting or specialized solvers. Validation on real-world hardware would also be an important next step to ensure the proposed method can be effectively deployed in practical applications.
Conclusion
This paper presents a novel framework for time-optimal flight planning that incorporates safety constraints and uses data-driven techniques to model the drone's dynamics. The proposed MPC-based approach can find faster flight paths compared to baseline methods while still maintaining important safety limits.
The use of data-driven modeling is a key strength, as it can capture complex nonlinear drone behaviors that may be difficult to model from first principles. The time-optimal MPC formulation also allows the drone to quickly navigate through 3D environments while avoiding obstacles.
Overall, this research contributes an important step towards developing more capable and efficient autonomous drone systems, which could have applications in areas like drone racing, package delivery, and emergency response.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Multi-Model Predictive Attitude Control of Quadrotors
Mohammadreza Izadi, Zeinab Shayan, Reza Faieghi
0
0
This paper introduces a new multi-model predictive control (MMPC) method for quadrotor attitude control with performance nearly on par with nonlinear model predictive control (NMPC) and computational efficiency similar to linear model predictive control (LMPC). Conventional NMPC, while effective, is computationally intensive, especially for attitude control that needs a high refresh rate. Conversely, LMPC offers computational advantages but suffers from poor performance and local stability. Our approach relies on multiple linear models of attitude dynamics, each accompanied by a linear model predictive controller, dynamically switching between them given flight conditions. We leverage gap metric analysis to minimize the number of models required to accurately predict the vehicle behavior in various conditions and incorporate a soft switching mechanism to ensure system stability during controller transitions. Our results show that with just 15 models, the vehicle attitude can be accurately controlled across various set points. Comparative evaluations with existing controllers such as incremental nonlinear dynamic inversion, sliding mode control, LMPC, and NMPC reveal that our approach closely matches the effectiveness of NMPC, outperforming other methods, with a running time comparable to LMPC.
6/26/2024
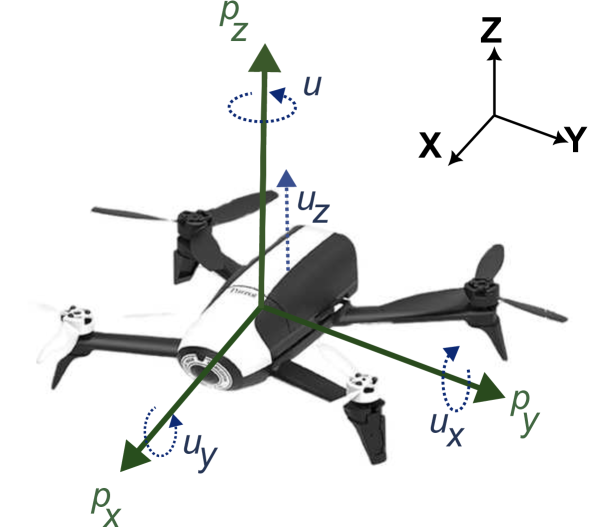
Closed-Loop Model Identification and MPC-based Navigation of Quadcopters: A Case Study of Parrot Bebop 2
Mohsen Amiri, Mehdi Hosseinzadeh
0
0
The growing potential of quadcopters in various domains, such as aerial photography, search and rescue, and infrastructure inspection, underscores the need for real-time control under strict safety and operational constraints. This challenge is compounded by the inherent nonlinear dynamics of quadcopters and the on-board computational limitations they face. This paper aims at addressing these challenges. First, this paper presents a comprehensive procedure for deriving a linear yet efficient model to describe the dynamics of quadrotors, thereby reducing complexity without compromising efficiency. Then, this paper develops a steady-state-aware Model Predictive Control (MPC) to effectively navigate quadcopters, while guaranteeing constraint satisfaction at all times. The main advantage of the steady-state-aware MPC is its low computational complexity, which makes it an appropriate choice for systems with limited computing capacity, like quadcopters. This paper considers Parrot Bebop 2 as the running example, and experimentally validates and evaluates the proposed algorithms.
4/12/2024

Embedded Hierarchical MPC for Autonomous Navigation
Dennis Benders, Johannes Kohler, Thijs Niesten, Robert Babuv{s}ka, Javier Alonso-Mora, Laura Ferranti
0
0
To efficiently deploy robotic systems in society, mobile robots need to autonomously and safely move through complex environments. Nonlinear model predictive control (MPC) methods provide a natural way to find a dynamically feasible trajectory through the environment without colliding with nearby obstacles. However, the limited computation power available on typical embedded robotic systems, such as quadrotors, poses a challenge to running MPC in real-time, including its most expensive tasks: constraints generation and optimization. To address this problem, we propose a novel hierarchical MPC scheme that interconnects a planning and a tracking layer. The planner constructs a trajectory with a long prediction horizon at a slow rate, while the tracker ensures trajectory tracking at a relatively fast rate. We prove that the proposed framework avoids collisions and is recursively feasible. Furthermore, we demonstrate its effectiveness in simulations and lab experiments with a quadrotor that needs to reach a goal position in a complex static environment. The code is efficiently implemented on the quadrotor's embedded computer to ensure real-time feasibility. Compared to a state-of-the-art single-layer MPC formulation, this allows us to increase the planning horizon by a factor of 5, which results in significantly better performance.
6/18/2024
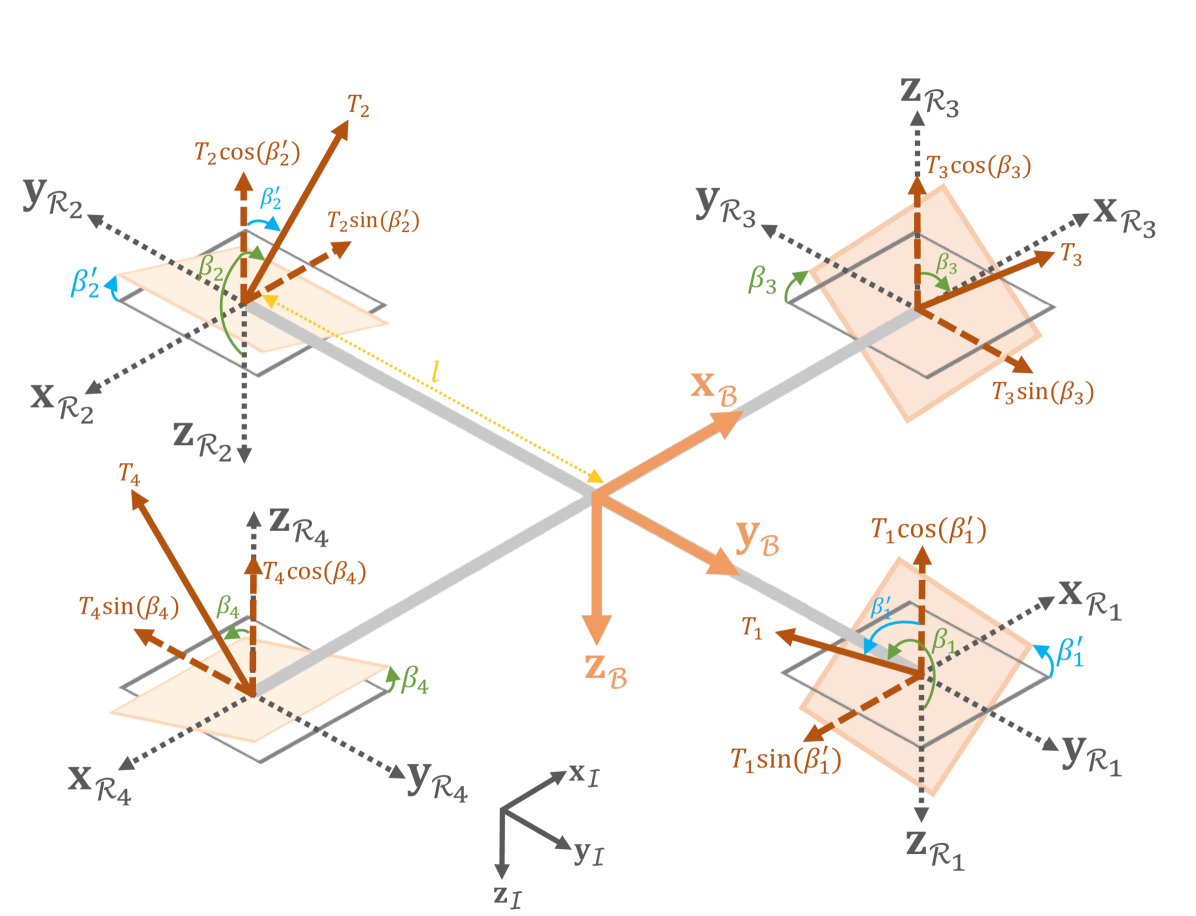
Nonlinear Model Predictive Control of Tiltrotor Quadrotors with Feasible Control Allocation
Zeinab Shayan, Jann Cristobal, Mohammadreza Izadi, Amin Yazdanshenas, Mehdi Naderi, Reza Faieghi
0
0
This paper presents a new flight control framework for tilt-rotor multirotor uncrewed aerial vehicles (MRUAVs). Tiltrotor designs offer full actuation but introduce complexity in control allocation due to actuator redundancy. We propose a new approach where the allocator is tightly coupled with the controller, ensuring that the control signals generated by the controller are feasible within the vehicle actuation space. We leverage nonlinear model predictive control (NMPC) to implement the above framework, providing feasible control signals and optimizing performance. This unified control structure simultaneously manages both position and attitude, which eliminates the need for cascaded position and attitude control loops. Extensive numerical experiments demonstrate that our approach significantly outperforms conventional techniques that are based on linear quadratic regulator (LQR) and sliding mode control (SMC), especially in high-acceleration trajectories and disturbance rejection scenarios, making the proposed approach a viable option for enhanced control precision and robustness, particularly in challenging missions.
6/26/2024