Nonlinear Model Predictive Control of Tiltrotor Quadrotors with Feasible Control Allocation
2406.06130
0
0
Abstract
This paper presents a new flight control framework for tilt-rotor multirotor uncrewed aerial vehicles (MRUAVs). Tiltrotor designs offer full actuation but introduce complexity in control allocation due to actuator redundancy. We propose a new approach where the allocator is tightly coupled with the controller, ensuring that the control signals generated by the controller are feasible within the vehicle actuation space. We leverage nonlinear model predictive control (NMPC) to implement the above framework, providing feasible control signals and optimizing performance. This unified control structure simultaneously manages both position and attitude, which eliminates the need for cascaded position and attitude control loops. Extensive numerical experiments demonstrate that our approach significantly outperforms conventional techniques that are based on linear quadratic regulator (LQR) and sliding mode control (SMC), especially in high-acceleration trajectories and disturbance rejection scenarios, making the proposed approach a viable option for enhanced control precision and robustness, particularly in challenging missions.
Create account to get full access
Overview
- This paper presents a nonlinear model predictive control (NMPC) approach for tiltrotor quadrotor systems with feasible control allocation.
- The key contributions include a tiltrotor quadrotor dynamic model, a NMPC controller design with a custom control allocation strategy, and simulation results demonstrating the controller's performance.
- The proposed system aims to enable tiltrotor quadrotors to perform complex maneuvers by efficiently distributing control inputs across multiple actuators.
Plain English Explanation
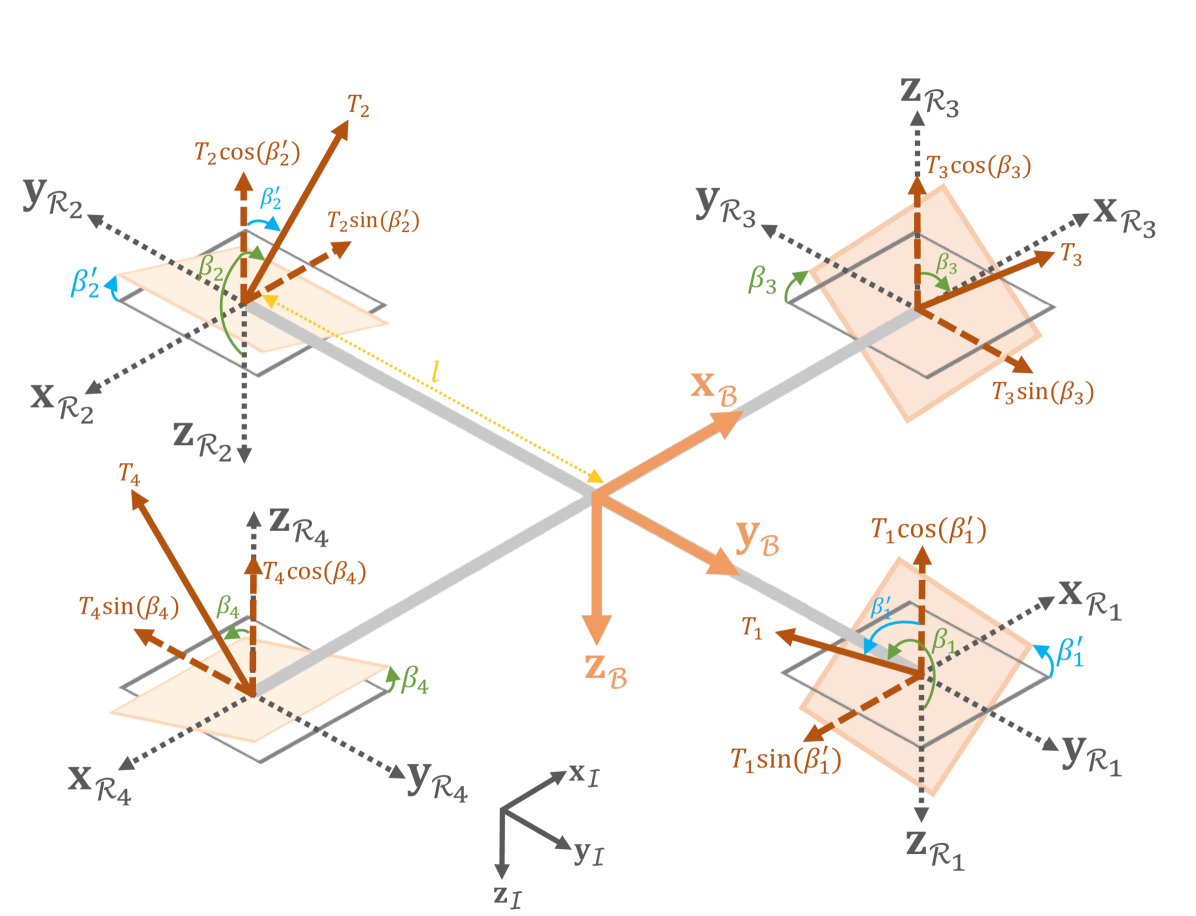
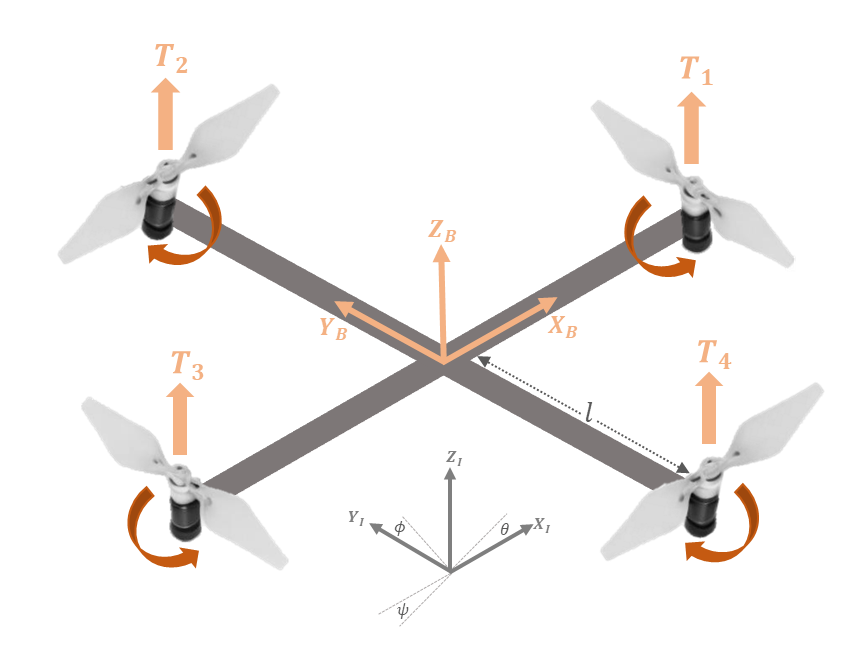
This research focuses on developing advanced control systems for a specific type of drone called a "tiltrotor quadrotor." Tiltrotor quadrotors have four rotors like a typical quadcopter, but they can also tilt their rotors to transition between vertical takeoff/landing and horizontal flight.
The researchers created a detailed mathematical model to capture the complex dynamics of these tiltrotor quadrotors. They then designed a sophisticated control algorithm called "nonlinear model predictive control" (NMPC) to fly the drone. The NMPC controller continuously predicts the future state of the drone and adjusts the motor speeds and rotor tilt angles to achieve the desired flight path.
Crucially, the researchers also developed a "control allocation" strategy to efficiently distribute the control commands across the drone's multiple actuators (motors and tilt mechanisms). This ensures the control inputs are feasible and the drone can actually execute the desired maneuvers.
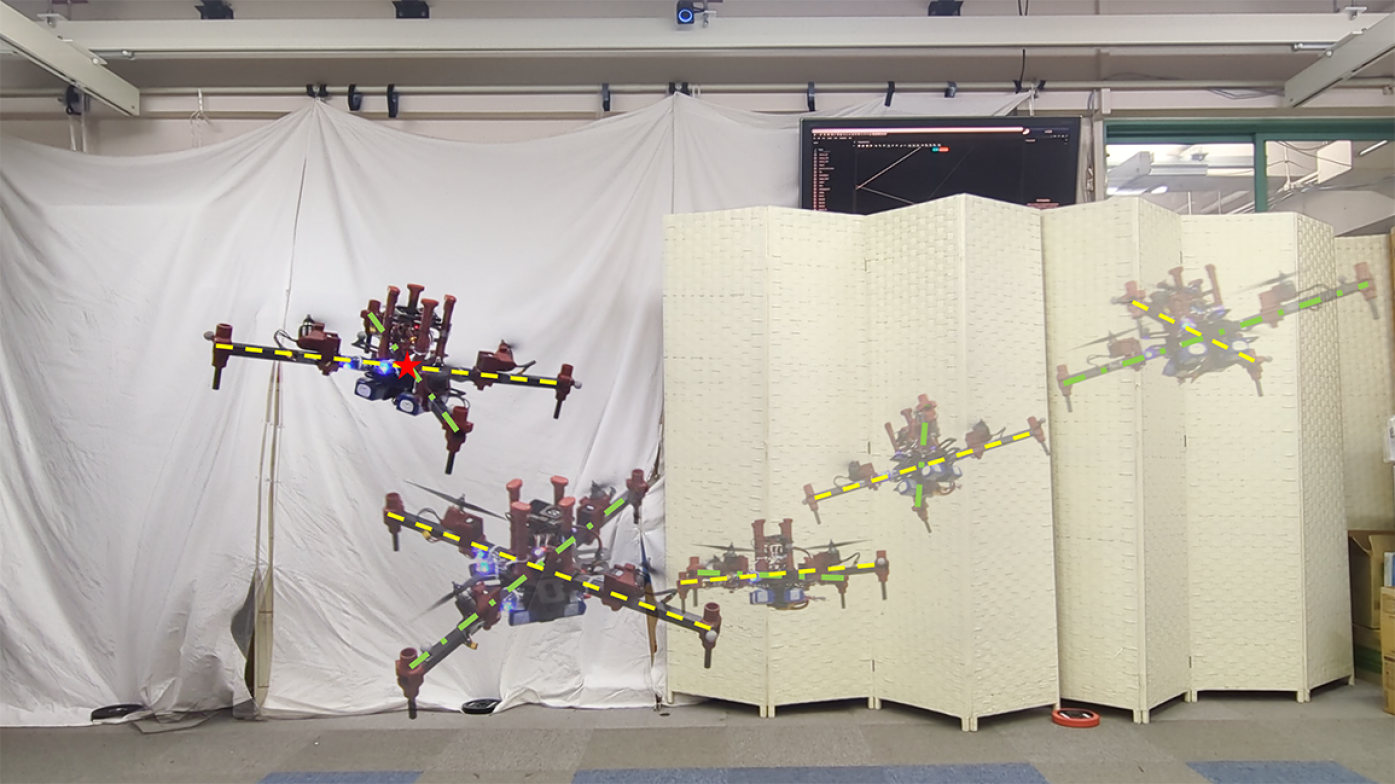
The researchers validated their approach through computer simulations, demonstrating the NMPC controller's ability to fly the tiltrotor quadrotor through complex 3D trajectories. This work could lead to more agile and versatile drone platforms capable of a wider range of aerial missions.
Technical Explanation
The paper presents a NMPC approach for controlling tiltrotor quadrotor systems. The authors first derive a detailed nonlinear dynamic model of the tiltrotor quadrotor, capturing the complex interactions between the tilting rotors, the airframe, and the environment.
They then design an NMPC controller that optimizes the rotor speeds and tilt angles to track desired position, velocity, and attitude references. The NMPC formulation includes constraints to ensure the control inputs are physically realizable. To address the challenge of distributing the control commands across the redundant actuators, the researchers develop a custom control allocation strategy.
The proposed approach is evaluated through numerical simulations, where the NMPC controller is shown to successfully navigate the tiltrotor quadrotor through complex 3D trajectories. The results demonstrate the effectiveness of the NMPC controller and the feasibility of the control allocation scheme.
Critical Analysis
The paper provides a comprehensive framework for controlling tiltrotor quadrotors using NMPC with feasible control allocation. The authors have carefully modeled the system dynamics and developed an optimization-based control strategy to handle the complex multirotor kinematics and aerodynamics.
One potential limitation is the reliance on simulation-based validation. While the simulations appear thorough, experimental validation on a physical tiltrotor quadrotor platform would be valuable to assess the controller's performance in real-world conditions.
Additionally, the paper does not explore the online model identification capabilities of the NMPC controller, which could be important for handling model uncertainties and changes in the system dynamics over time.
Further research could investigate the controller's fault-tolerance and adaptive capabilities to ensure robust performance in the face of component failures or environmental disturbances.
Conclusion
This paper presents a nonlinear model predictive control approach for tiltrotor quadrotor systems with a custom control allocation strategy. The proposed framework allows tiltrotor quadrotors to perform complex 3D maneuvers by efficiently distributing control inputs across the redundant actuators.
The detailed system modeling, NMPC controller design, and simulation-based validation demonstrate the potential of this approach to enable more agile and versatile drone platforms. Further experimental validation and exploration of advanced capabilities, such as online model identification and fault-tolerance, could strengthen the practical applicability of this research.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Servo Integrated Nonlinear Model Predictive Control for Overactuated Tiltable-Quadrotors
Jinjie Li, Junichiro Sugihara, Moju Zhao
0
0
Quadrotors are widely employed across various domains, yet the conventional type faces limitations due to underactuation, where attitude control is closely tied to positional adjustments. In contrast, quadrotors equipped with tiltable rotors offer overactuation, empowering them to track both position and attitude trajectories. However, the nonlinear dynamics of the drone body and the sluggish response of tilting servos pose challenges for conventional cascade controllers. In this study, we propose a control methodology for tilting-rotor quadrotors based on nonlinear model predictive control (NMPC). Unlike conventional approaches, our method preserves the full dynamics without simplification and utilizes actuator commands directly as control inputs. Notably, we incorporate a first-order servo model within the NMPC framework. Through simulation, we observe that integrating the servo dynamics not only enhances control performance but also accelerates convergence. To assess the efficacy of our approach, we fabricate a tiltable-quadrotor and deploy the algorithm onboard at a frequency of 100Hz. Extensive real-world experiments demonstrate rapid, robust, and smooth pose tracking performance.
5/17/2024
Multi-Model Predictive Attitude Control of Quadrotors
Mohammadreza Izadi, Zeinab Shayan, Reza Faieghi
0
0
This paper introduces a new multi-model predictive control (MMPC) method for quadrotor attitude control with performance nearly on par with nonlinear model predictive control (NMPC) and computational efficiency similar to linear model predictive control (LMPC). Conventional NMPC, while effective, is computationally intensive, especially for attitude control that needs a high refresh rate. Conversely, LMPC offers computational advantages but suffers from poor performance and local stability. Our approach relies on multiple linear models of attitude dynamics, each accompanied by a linear model predictive controller, dynamically switching between them given flight conditions. We leverage gap metric analysis to minimize the number of models required to accurately predict the vehicle behavior in various conditions and incorporate a soft switching mechanism to ensure system stability during controller transitions. Our results show that with just 15 models, the vehicle attitude can be accurately controlled across various set points. Comparative evaluations with existing controllers such as incremental nonlinear dynamic inversion, sliding mode control, LMPC, and NMPC reveal that our approach closely matches the effectiveness of NMPC, outperforming other methods, with a running time comparable to LMPC.
6/26/2024

New!Quaternion-based Adaptive Backstepping Fast Terminal Sliding Mode Control for Quadrotor UAVs with Finite Time Convergence
Arezo Shevidi, Hashim A. Hashim
0
0
This paper proposes a novel quaternion-based approach for tracking the translation (position and linear velocity) and rotation (attitude and angular velocity) trajectories of underactuated Unmanned Aerial Vehicles (UAVs). Quadrotor UAVs are challenging regarding accuracy, singularity, and uncertainties issues. Controllers designed based on unit-quaternion are singularity-free for attitude representation compared to other methods (e.g., Euler angles), which fail to represent the vehicle's attitude at multiple orientations. Quaternion-based Adaptive Backstepping Control (ABC) and Adaptive Fast Terminal Sliding Mode Control (AFTSMC) are proposed to address a set of challenging problems. A quaternion-based ABC, a superior recursive approach, is proposed to generate the necessary thrust handling unknown uncertainties and UAV translation trajectory tracking. Next, a quaternion-based AFTSMC is developed to overcome parametric uncertainties, avoid singularity, and ensure fast convergence in a finite time. Moreover, the proposed AFTSMC is able to significantly minimize control signal chattering, which is the main reason for actuator failure and provide smooth and accurate rotational control input. To ensure the robustness of the proposed approach, the designed control algorithms have been validated considering unknown time-variant parametric uncertainties and significant initialization errors. The proposed techniques has been compared to state-of-the-art control technique. Keywords: Adaptive Backstepping Control (ABC), Adaptive Fast Terminal Sliding Mode Control (AFTSMC), Unit-quaternion, Unmanned Aerial Vehicles, Singularity Free, Pose Control
7/2/2024

Auto-Multilift: Distributed Learning and Control for Cooperative Load Transportation With Quadrotors
Bingheng Wang, Kuankuan Sima, Rui Huang, Lin Zhao
0
0
Designing motion control and planning algorithms for multilift systems remains challenging due to the complexities of dynamics, collision avoidance, actuator limits, and scalability. Existing methods that use optimization and distributed techniques effectively address these constraints and scalability issues. However, they often require substantial manual tuning, leading to suboptimal performance. This paper proposes Auto-Multilift, a novel framework that automates the tuning of model predictive controllers (MPCs) for multilift systems. We model the MPC cost functions with deep neural networks (DNNs), enabling fast online adaptation to various scenarios. We develop a distributed policy gradient algorithm to train these DNNs efficiently in a closed-loop manner. Central to our algorithm is distributed sensitivity propagation, which parallelizes gradient computation across quadrotors, focusing on actual system state sensitivities relative to key MPC parameters. We also provide theoretical guarantees for the convergence of this algorithm. Extensive simulations show rapid convergence and favorable scalability to a large number of quadrotors. Our method outperforms a state-of-the-art open-loop MPC tuning approach by effectively learning adaptive MPCs from trajectory tracking errors and handling the unique dynamics couplings within the multilift system. Additionally, our framework can learn an adaptive reference for reconfigurating the system when traversing through multiple narrow slots.
6/10/2024