MSI-NeRF: Linking Omni-Depth with View Synthesis through Multi-Sphere Image aided Generalizable Neural Radiance Field

0
Sign in to get full access
Overview
- The paper proposes a novel approach called MSI-NeRF (Multi-Sphere Image-aided Neural Radiance Field) that links omni-depth with view synthesis through a generalized neural radiance field.
- It presents a framework that can efficiently capture the complete 3D geometry and appearance of a scene from a sparse set of 360-degree images.
- The key innovations include a multi-sphere image representation that enables efficient depth estimation, and a generalized neural radiance field that can synthesize high-quality novel views.
Plain English Explanation
MSI-NeRF: Linking Omni-Depth with View Synthesis through Multi-Sphere Image aided Generalizable Neural Radiance Field is a research paper that introduces a new method for creating realistic 3D models and animations from a small number of 360-degree photos.
The main idea is to use a multi-sphere image (MSI) representation to efficiently estimate the depth of objects in the scene. This depth information is then combined with a generalized neural radiance field to synthesize high-quality novel views, allowing users to virtually explore the 3D environment from different perspectives.
The key benefits of this approach are:
- Efficient Depth Estimation: The MSI representation enables rapid and accurate depth estimation from a sparse set of 360-degree images, avoiding the need for dense camera arrays or complex depth sensors.
- Realistic View Synthesis: The generalized neural radiance field can generate photorealistic novel views, capturing the complete 3D geometry and appearance of the scene.
- Generalizability: The framework is designed to be highly generalizable, allowing it to be applied to a wide range of indoor and outdoor scenes without the need for extensive retraining or specialized hardware.
This research could have important applications in areas like virtual tourism, telepresence, and immersive gaming, where the ability to create high-quality 3D models from limited data is crucial.
Technical Explanation
The MSI-NeRF framework consists of two main components:
-
Multi-Sphere Image (MSI) Representation: The MSI representation captures the complete 360-degree geometry of a scene using a set of concentric spheres. Each sphere stores depth and color information, allowing for efficient depth estimation from sparse input data.
-
Generalized Neural Radiance Field: The generalized neural radiance field is a neural network-based model that learns to map 3D coordinates to color and volume density, enabling high-quality novel view synthesis. This component is designed to be highly generalizable, allowing it to be applied to a wide range of scenes without the need for extensive retraining.
The researchers evaluate their approach on both indoor and outdoor datasets, demonstrating its ability to outperform state-of-the-art methods in terms of depth estimation accuracy and novel view synthesis quality. Additionally, they show that the framework can be efficiently deployed on commodity hardware, making it accessible for a wide range of applications.
Critical Analysis
The MSI-NeRF paper presents a promising approach for linking omni-depth with view synthesis, but it also acknowledges several limitations and areas for further research:
- Handling Dynamic Scenes: The current framework is designed for static scenes and may struggle with capturing and rendering dynamic elements, such as moving objects or people. Extending the approach to handle dynamic content would be an important next step.
- Scalability to Large Environments: The paper focuses on relatively small-scale indoor and outdoor scenes. Applying the framework to larger, more complex environments may require additional innovations to maintain efficiency and accuracy.
- Sensitivity to Input Data Quality: The performance of the MSI-NeRF system is heavily dependent on the quality of the input 360-degree images. Exploring ways to improve robustness to noisy or low-quality input data could further enhance the practical applicability of the method.
Despite these limitations, the MSI-NeRF approach represents a significant advancement in the field of novel view synthesis and could have a substantial impact on various applications, such as virtual tourism, telepresence, and immersive gaming. Further research and development in this area could lead to even more impressive results and broader real-world applications.
Conclusion
The MSI-NeRF paper presents a novel framework that links omni-depth with view synthesis through a multi-sphere image representation and a generalized neural radiance field. This approach demonstrates the ability to efficiently capture the complete 3D geometry and appearance of a scene from a sparse set of 360-degree images, enabling high-quality novel view synthesis.
The key innovations of the MSI-NeRF framework, such as the multi-sphere image representation and the generalized neural radiance field, have the potential to significantly impact various applications, including virtual tourism, telepresence, and immersive gaming. While the paper acknowledges some limitations, the overall approach represents an important step forward in the field of novel view synthesis and could inspire further research and development in this exciting area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
MSI-NeRF: Linking Omni-Depth with View Synthesis through Multi-Sphere Image aided Generalizable Neural Radiance Field
Dongyu Yan, Guanyu Huang, Fengyu Quan, Haoyao Chen
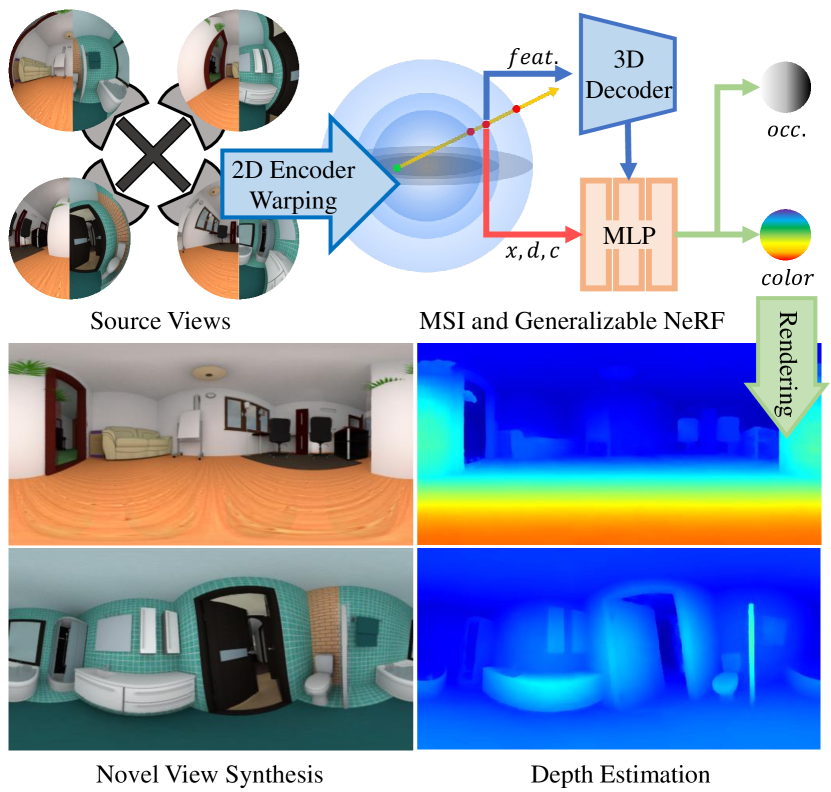
Panoramic observation using fisheye cameras is significant in virtual reality (VR) and robot perception. However, panoramic images synthesized by traditional methods lack depth information and can only provide three degrees-of-freedom (3DoF) rotation rendering in VR applications. To fully preserve and exploit the parallax information within the original fisheye cameras, we introduce MSI-NeRF, which combines deep learning omnidirectional depth estimation and novel view synthesis. We construct a multi-sphere image as a cost volume through feature extraction and warping of the input images. We further build an implicit radiance field using spatial points and interpolated 3D feature vectors as input, which can simultaneously realize omnidirectional depth estimation and 6DoF view synthesis. Leveraging the knowledge from depth estimation task, our method can learn scene appearance by source view supervision only. It does not require novel target views and can be trained conveniently on existing panorama depth estimation datasets. Our network has the generalization ability to reconstruct unknown scenes efficiently using only four images. Experimental results show that our method outperforms existing methods in both depth estimation and novel view synthesis tasks.
Read more7/23/2024
🧠
0
Novel View Synthesis with Neural Radiance Fields for Industrial Robot Applications
Markus Hillemann, Robert Langendorfer, Max Heiken, Max Mehltretter, Andreas Schenk, Martin Weinmann, Stefan Hinz, Christian Heipke, Markus Ulrich
Neural Radiance Fields (NeRFs) have become a rapidly growing research field with the potential to revolutionize typical photogrammetric workflows, such as those used for 3D scene reconstruction. As input, NeRFs require multi-view images with corresponding camera poses as well as the interior orientation. In the typical NeRF workflow, the camera poses and the interior orientation are estimated in advance with Structure from Motion (SfM). But the quality of the resulting novel views, which depends on different parameters such as the number and distribution of available images, as well as the accuracy of the related camera poses and interior orientation, is difficult to predict. In addition, SfM is a time-consuming pre-processing step, and its quality strongly depends on the image content. Furthermore, the undefined scaling factor of SfM hinders subsequent steps in which metric information is required. In this paper, we evaluate the potential of NeRFs for industrial robot applications. We propose an alternative to SfM pre-processing: we capture the input images with a calibrated camera that is attached to the end effector of an industrial robot and determine accurate camera poses with metric scale based on the robot kinematics. We then investigate the quality of the novel views by comparing them to ground truth, and by computing an internal quality measure based on ensemble methods. For evaluation purposes, we acquire multiple datasets that pose challenges for reconstruction typical of industrial applications, like reflective objects, poor texture, and fine structures. We show that the robot-based pose determination reaches similar accuracy as SfM in non-demanding cases, while having clear advantages in more challenging scenarios. Finally, we present first results of applying the ensemble method to estimate the quality of the synthetic novel view in the absence of a ground truth.
Read more5/8/2024
👨🏫
0
Depth Supervised Neural Surface Reconstruction from Airborne Imagery
Vincent Hackstein, Paul Fauth-Mayer, Matthias Rothermel, Norbert Haala
While originally developed for novel view synthesis, Neural Radiance Fields (NeRFs) have recently emerged as an alternative to multi-view stereo (MVS). Triggered by a manifold of research activities, promising results have been gained especially for texture-less, transparent, and reflecting surfaces, while such scenarios remain challenging for traditional MVS-based approaches. However, most of these investigations focus on close-range scenarios, with studies for airborne scenarios still missing. For this task, NeRFs face potential difficulties at areas of low image redundancy and weak data evidence, as often found in street canyons, facades or building shadows. Furthermore, training such networks is computationally expensive. Thus, the aim of our work is twofold: First, we investigate the applicability of NeRFs for aerial image blocks representing different characteristics like nadir-only, oblique and high-resolution imagery. Second, during these investigations we demonstrate the benefit of integrating depth priors from tie-point measures, which are provided during presupposed Bundle Block Adjustment. Our work is based on the state-of-the-art framework VolSDF, which models 3D scenes by signed distance functions (SDFs), since this is more applicable for surface reconstruction compared to the standard volumetric representation in vanilla NeRFs. For evaluation, the NeRF-based reconstructions are compared to results of a publicly available benchmark dataset for airborne images.
Read more4/26/2024

0
Omni-Recon: Harnessing Image-based Rendering for General-Purpose Neural Radiance Fields
Yonggan Fu, Huaizhi Qu, Zhifan Ye, Chaojian Li, Kevin Zhao, Yingyan Lin
Recent breakthroughs in Neural Radiance Fields (NeRFs) have sparked significant demand for their integration into real-world 3D applications. However, the varied functionalities required by different 3D applications often necessitate diverse NeRF models with various pipelines, leading to tedious NeRF training for each target task and cumbersome trial-and-error experiments. Drawing inspiration from the generalization capability and adaptability of emerging foundation models, our work aims to develop one general-purpose NeRF for handling diverse 3D tasks. We achieve this by proposing a framework called Omni-Recon, which is capable of (1) generalizable 3D reconstruction and zero-shot multitask scene understanding, and (2) adaptability to diverse downstream 3D applications such as real-time rendering and scene editing. Our key insight is that an image-based rendering pipeline, with accurate geometry and appearance estimation, can lift 2D image features into their 3D counterparts, thus extending widely explored 2D tasks to the 3D world in a generalizable manner. Specifically, our Omni-Recon features a general-purpose NeRF model using image-based rendering with two decoupled branches: one complex transformer-based branch that progressively fuses geometry and appearance features for accurate geometry estimation, and one lightweight branch for predicting blending weights of source views. This design achieves state-of-the-art (SOTA) generalizable 3D surface reconstruction quality with blending weights reusable across diverse tasks for zero-shot multitask scene understanding. In addition, it can enable real-time rendering after baking the complex geometry branch into meshes, swift adaptation to achieve SOTA generalizable 3D understanding performance, and seamless integration with 2D diffusion models for text-guided 3D editing.
Read more7/19/2024