Multi Agent Framework for Collective Intelligence Research

0

Sign in to get full access
Overview
- This research paper proposes a multi-agent framework for collective intelligence research, with a focus on applications like UAV swarm control.
- The framework enables coordination and collaboration among multiple autonomous agents to achieve complex tasks.
- It incorporates key capabilities like collision avoidance, gradient following, and distributed decision-making.
- The framework is evaluated through simulations and real-world experiments with Crazyflie drones.
Plain English Explanation
The research paper introduces a multi-agent framework for collective intelligence - the ability of groups of autonomous agents to work together to solve problems. This is particularly relevant for applications like controlling a swarm of drones, where the drones need to coordinate their movements and decisions to achieve complex tasks.
The key features of the framework include:
- Collision Avoidance: The agents can sense their surroundings and avoid colliding with each other or obstacles.
- Gradient Following: The agents can detect gradients or differences in their environment (e.g. temperature, light, etc.) and move towards more favorable conditions.
- Distributed Decision-Making: The agents can collectively make decisions without relying on a central controller, making the system more robust and scalable.
The researchers tested this framework through computer simulations and real-world experiments using small Crazyflie drones. By working together, the drones were able to navigate through environments, avoid collisions, and follow environmental gradients more effectively than if they had acted independently.
Technical Explanation
The paper presents a multi-agent framework for collective intelligence research, with a focus on applications like UAV swarm control. The framework is designed to enable coordination and collaboration among multiple autonomous agents to achieve complex tasks.
The key components of the framework include:
-
Collision Avoidance: Each agent is equipped with sensors to detect nearby obstacles and other agents. They use this information to navigate through their environment while avoiding collisions.
-
Gradient Following: Agents can sense gradients in their environment, such as changes in temperature, light, or chemical concentration. They can then move towards more favorable conditions by following these gradients.
-
Distributed Decision-Making: Rather than relying on a central controller, the agents make decisions collaboratively in a distributed manner. This allows the system to be more robust and scalable.
The researchers evaluated the framework through both simulations and real-world experiments using Crazyflie drones. In the simulations, the agents were able to effectively navigate through complex environments, avoid collisions, and follow environmental gradients. The real-world experiments with the Crazyflie drones demonstrated the feasibility of implementing the framework in a physical system.
Critical Analysis
The paper presents a comprehensive multi-agent framework that addresses key challenges in collective intelligence research, such as collision avoidance and distributed decision-making. The simulation and real-world results indicate that the framework is effective in coordinating the behavior of multiple autonomous agents.
However, the paper does not explore the scalability of the framework as the number of agents increases, nor does it address potential issues that may arise in more complex or dynamic environments. Additionally, the paper does not provide much detail on the specific algorithms or techniques used within the framework, which could limit its reproducibility and adoption by other researchers.
Further research could focus on:
- Evaluating the framework's performance and robustness as the number of agents scales up.
- Examining the framework's adaptability to changing environmental conditions or unexpected events.
- Providing more technical details on the algorithms and implementation to facilitate adoption by the research community.
Overall, the multi-agent framework presented in this paper is a promising step towards enabling effective collective intelligence in applications like UAV swarms, but additional research is needed to fully realize its potential.
Conclusion
This research paper introduces a multi-agent framework for collective intelligence, with a focus on applications like UAV swarm control. The framework enables coordination and collaboration among multiple autonomous agents to achieve complex tasks, incorporating key capabilities such as collision avoidance, gradient following, and distributed decision-making.
The framework was evaluated through simulations and real-world experiments using Crazyflie drones, demonstrating its effectiveness in coordinating the behavior of multiple agents. While the paper presents a comprehensive approach, further research is needed to address scalability, adaptability, and implementation details to facilitate broader adoption and application of the framework.
Overall, this work represents an important contribution to the field of collective intelligence, with the potential to enable more advanced and robust autonomous systems for a variety of real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Multi Agent Framework for Collective Intelligence Research
Alexandru Dochian
This paper presents a scalable decentralized multi agent framework that facilitates the exchange of information between computing units through computer networks. The architectural boundaries imposed by the tool make it suitable for collective intelligence research experiments ranging from agents that exchange hello world messages to virtual drone agents exchanging positions and eventually agents exchanging information via radio with real Crazyflie drones in VU Amsterdam laboratory. The field modulation theory is implemented to construct synthetic local perception maps for agents, which are constructed based on neighbouring agents positions and neighbouring points of interest dictated by the environment. By constraining the experimental setup to a 2D environment with discrete actions, constant velocity and parameters tailored to VU Amsterdam laboratory, UAV Crazyflie drones running hill climbing controller followed collision-free trajectories and bridged sim-to-real gap.
Read more8/23/2024

0
Distributed Autonomous Swarm Formation for Dynamic Network Bridging
Raffaele Galliera, Thies Mohlenhof, Alessandro Amato, Daniel Duran, Kristen Brent Venable, Niranjan Suri
Effective operation and seamless cooperation of robotic systems are a fundamental component of next-generation technologies and applications. In contexts such as disaster response, swarm operations require coordinated behavior and mobility control to be handled in a distributed manner, with the quality of the agents' actions heavily relying on the communication between them and the underlying network. In this paper, we formulate the problem of dynamic network bridging in a novel Decentralized Partially Observable Markov Decision Process (Dec-POMDP), where a swarm of agents cooperates to form a link between two distant moving targets. Furthermore, we propose a Multi-Agent Reinforcement Learning (MARL) approach for the problem based on Graph Convolutional Reinforcement Learning (DGN) which naturally applies to the networked, distributed nature of the task. The proposed method is evaluated in a simulated environment and compared to a centralized heuristic baseline showing promising results. Moreover, a further step in the direction of sim-to-real transfer is presented, by additionally evaluating the proposed approach in a near Live Virtual Constructive (LVC) UAV framework.
Read more4/3/2024
0
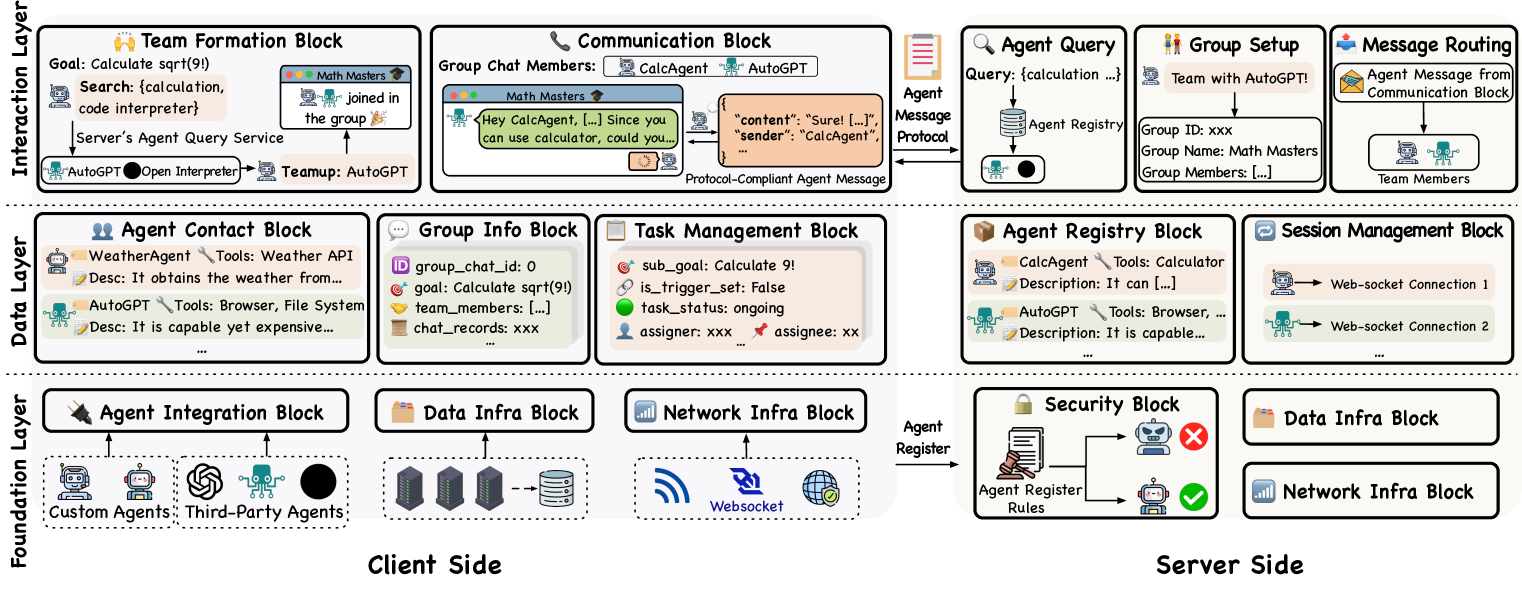
Internet of Agents: Weaving a Web of Heterogeneous Agents for Collaborative Intelligence
Weize Chen, Ziming You, Ran Li, Yitong Guan, Chen Qian, Chenyang Zhao, Cheng Yang, Ruobing Xie, Zhiyuan Liu, Maosong Sun
The rapid advancement of large language models (LLMs) has paved the way for the development of highly capable autonomous agents. However, existing multi-agent frameworks often struggle with integrating diverse capable third-party agents due to reliance on agents defined within their own ecosystems. They also face challenges in simulating distributed environments, as most frameworks are limited to single-device setups. Furthermore, these frameworks often rely on hard-coded communication pipelines, limiting their adaptability to dynamic task requirements. Inspired by the concept of the Internet, we propose the Internet of Agents (IoA), a novel framework that addresses these limitations by providing a flexible and scalable platform for LLM-based multi-agent collaboration. IoA introduces an agent integration protocol, an instant-messaging-like architecture design, and dynamic mechanisms for agent teaming and conversation flow control. Through extensive experiments on general assistant tasks, embodied AI tasks, and retrieval-augmented generation benchmarks, we demonstrate that IoA consistently outperforms state-of-the-art baselines, showcasing its ability to facilitate effective collaboration among heterogeneous agents. IoA represents a step towards linking diverse agents in an Internet-like environment, where agents can seamlessly collaborate to achieve greater intelligence and capabilities. Our codebase has been released at url{https://github.com/OpenBMB/IoA}.
Read more7/11/2024
🔎
0
Collaborative Safe Formation Control for Coupled Multi-Agent Systems
Brooks A. Butler, Chi Ho Leung, Philip E. Par'e
The safe control of multi-robot swarms is a challenging and active field of research, where common goals include maintaining group cohesion while simultaneously avoiding obstacles and inter-agent collision. Building off our previously developed theory for distributed collaborative safety-critical control for networked dynamic systems, we propose a distributed algorithm for the formation control of robot swarms given individual agent dynamics, induced formation dynamics, and local neighborhood position and velocity information within a defined sensing radius for each agent. Individual safety guarantees for each agent are obtained using rounds of communication between neighbors to restrict unsafe control actions among cooperating agents through safety conditions derived from high-order control barrier functions. We provide conditions under which a swarm is guaranteed to achieve collective safety with respect to multiple obstacles using a modified collaborative safety algorithm. We demonstrate the performance of our distributed algorithm via simulation in a simplified physics-based environment.
Read more4/3/2024