Multi-finger Manipulation via Trajectory Optimization with Differentiable Rolling and Geometric Constraints

0

Sign in to get full access
Overview
- This paper presents a method for optimizing multi-finger manipulation trajectories using differentiable rolling and geometric constraints.
- The approach allows for dexterous object manipulation by a robotic hand while accounting for the complex interactions between the fingers and the object.
- The method is evaluated through simulation and real-world experiments, demonstrating its ability to plan and execute precise, multi-finger manipulation tasks.
Plain English Explanation
The paper describes a new technique for controlling the movements of robotic fingers to manipulate objects in a skilled and precise way. When a robot hand interacts with an object, there are complex physical interactions between the fingers and the object, such as the fingers rolling or sliding across the surface. This paper presents a method that can model and optimize these interactions to plan trajectories that allow the robot to perform intricate, multi-finger manipulation tasks.
The key idea is to incorporate the physics of rolling and geometric constraints into the optimization process used to generate the finger movements. This allows the robot to plan motions that take advantage of these physical interactions, rather than treating them as limitations. The approach is related to prior work on dexterous manipulation in confined spaces and using specialized wearable devices to enable more complex robot grasping and manipulation.
The researchers evaluate their method through computer simulations and real-world experiments, showing that it can enable robots to perform precise, multi-finger manipulation tasks that would be challenging using traditional control techniques. This work advances the state of the art in robotic dexterity and could have applications in areas like assistive robotics, manufacturing, and even space exploration.
Technical Explanation
The paper presents a trajectory optimization framework for multi-finger manipulation that incorporates differentiable models of rolling and geometric constraints. The key innovations are:
- Rolling Constraint: The researchers develop a differentiable model of rolling contact between the fingers and object, allowing the optimization to reason about and exploit rolling motions.
- Geometric Constraint: The method also includes a differentiable representation of the geometric constraints between the fingers and object, capturing interactions like surface contacts and collisions.
- Trajectory Optimization: These models are integrated into a trajectory optimization problem, where the objective is to find finger motions that manipulate the object in a desired way while satisfying the physical constraints.
The optimization problem is solved using a gradient-based method, allowing the system to efficiently explore the space of possible manipulation trajectories. The approach is evaluated in simulation and on a real robotic hand platform, demonstrating its ability to plan and execute precise, multi-finger manipulation tasks.
Critical Analysis
The paper makes a strong technical contribution by incorporating rolling and geometric constraints into a trajectory optimization framework for dexterous manipulation. The differentiable modeling of these physical interactions is a key enabler, allowing the optimization to reason about and exploit them.
However, the paper does note some limitations of the current approach. For example, the rolling model assumes pure rolling without any sliding, which may not always be the case in practice. There is also prior work on relaxing some of these constraints for more general multi-contact modeling and optimization. Additionally, the experiments are primarily focused on simulation and a single robotic hand platform, so further validation on a wider range of hardware and real-world scenarios would be valuable.
Overall, this work represents an important step forward in enabling robots to perform sophisticated, multi-finger manipulation tasks. Future research could explore ways to relax the assumptions, integrate the method with perception and planning systems, and demonstrate the approach on a broader range of applications.
Conclusion
This paper presents a novel trajectory optimization framework for multi-finger manipulation that explicitly models the rolling and geometric constraints between the fingers and object. By incorporating these physical interactions into the optimization process, the method can plan precise, dexterous manipulation trajectories that leverage the full capabilities of a robotic hand.
The evaluation in simulation and on a real robotic platform demonstrates the effectiveness of the approach, and the technical innovations around differentiable modeling of the physical constraints represent an important contribution to the field of robotic manipulation. While there are some limitations to the current work, this research advances the state of the art in robotic dexterity and could have significant implications for applications ranging from assistive robotics to space exploration.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Multi-finger Manipulation via Trajectory Optimization with Differentiable Rolling and Geometric Constraints
Fan Yang, Thomas Power, Sergio Aguilera Marinovic, Soshi Iba, Rana Soltani Zarrin, Dmitry Berenson
Parameterizing finger rolling and finger-object contacts in a differentiable manner is important for formulating dexterous manipulation as a trajectory optimization problem. In contrast to previous methods which often assume simplified geometries of the robot and object or do not explicitly model finger rolling, we propose a method to further extend the capabilities of dexterous manipulation by accounting for non-trivial geometries of both the robot and the object. By integrating the object's Signed Distance Field (SDF) with a sampling method, our method estimates contact and rolling-related variables and includes those in a trajectory optimization framework. This formulation naturally allows for the emergence of finger-rolling behaviors, enabling the robot to locally adjust the contact points. Our method is tested in a peg alignment task and a screwdriver turning task, where it outperforms the baselines in terms of achieving desired object configurations and avoiding dropping the object. We also successfully apply our method to a real-world screwdriver turning task, demonstrating its robustness to the sim2real gap.
Read more8/26/2024
0
Complementarity-Free Multi-Contact Modeling and Optimization for Dexterous Manipulation
Wanxin Jin
A significant barrier preventing model-based methods from matching the high performance of reinforcement learning in dexterous manipulation is the inherent complexity of multi-contact dynamics. Traditionally formulated using complementarity models, multi-contact dynamics introduces combinatorial complexity and non-smoothness, complicating contact-rich planning and control. In this paper, we circumvent these challenges by introducing a novel, simplified multi-contact model. Our new model, derived from the duality of optimization-based contact models, dispenses with the complementarity constructs entirely, providing computational advantages such as explicit time stepping, differentiability, automatic satisfaction of Coulomb friction law, and minimal hyperparameter tuning. We demonstrate the effectiveness and efficiency of the model for planning and control in a range of challenging dexterous manipulation tasks, including fingertip 3D in-air manipulation, TriFinger in-hand manipulation, and Allegro hand on-palm reorientation, all with diverse objects. Our method consistently achieves state-of-the-art results: (I) a 96.5% average success rate across tasks, (II) high manipulation accuracy with an average reorientation error of 11{deg} and position error of 7.8 mm, and (III) model predictive control running at 50-100 Hz for all tested dexterous manipulation tasks. These results are achieved with minimal hyperparameter tuning.
Read more8/20/2024

0
ContactSDF: Signed Distance Functions as Multi-Contact Models for Dexterous Manipulation
Wen Yang, Wanxin Jin
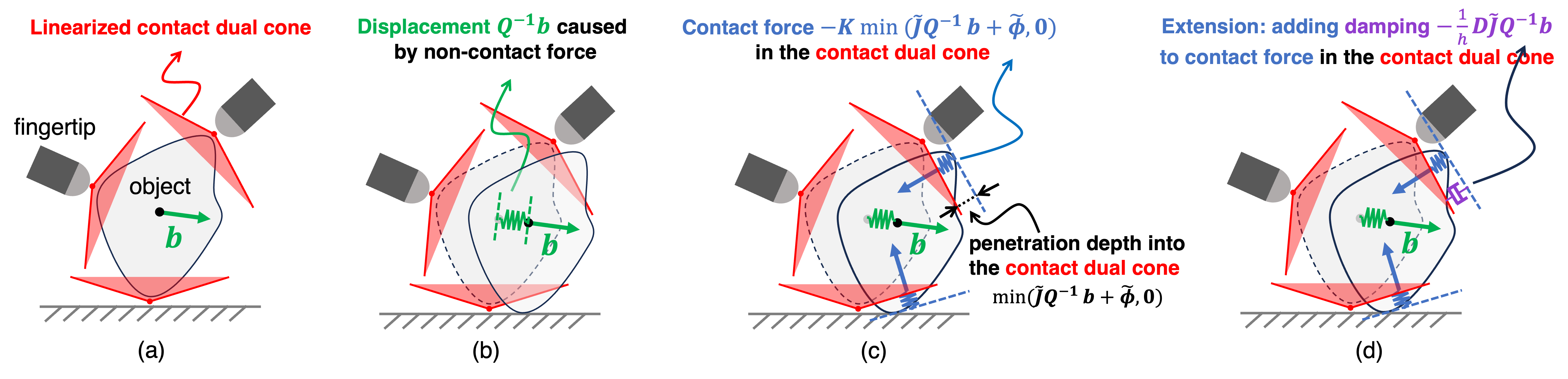
In this paper, we propose ContactSDF, a method that uses signed distance functions (SDFs) to approximate multi-contact models, including both collision detection and time-stepping routines. ContactSDF first establishes an SDF using the supporting plane representation of an object for collision detection, and then use the generated contact dual cones to build a second SDF for time stepping prediction of the next state. Those two SDFs create a differentiable and closed-form multi-contact dynamic model for state prediction, enabling efficient model learning and optimization for contact-rich manipulation. We perform extensive simulation experiments to show the effectiveness of ContactSDF for model learning and real-time control of dexterous manipulation. We further evaluate the ContactSDF on a hardware Allegro hand for on-palm reorientation tasks. Results show with around 2 minutes of learning on hardware, the ContactSDF achieves high-quality dexterous manipulation at a frequency of 30-60Hz.
Read more8/20/2024
0
Robotic in-hand manipulation with relaxed optimization
Ali Hammoud, Valerio Belcamino, Quentin Huet, Alessandro Carf`i, Mahdi Khoramshahi, Veronique Perdereau, Fulvio Mastrogiovanni
Dexterous in-hand manipulation is a unique and valuable human skill requiring sophisticated sensorimotor interaction with the environment while respecting stability constraints. Satisfying these constraints with generated motions is essential for a robotic platform to achieve reliable in-hand manipulation skills. Explicitly modelling these constraints can be challenging, but they can be implicitly modelled and learned through experience or human demonstrations. We propose a learning and control approach based on dictionaries of motion primitives generated from human demonstrations. To achieve this, we defined an optimization process that combines motion primitives to generate robot fingertip trajectories for moving an object from an initial to a desired final pose. Based on our experiments, our approach allows a robotic hand to handle objects like humans, adhering to stability constraints without requiring explicit formalization. In other words, the proposed motion primitive dictionaries learn and implicitly embed the constraints crucial to the in-hand manipulation task.
Read more6/10/2024