Multi-Robot Collaborative Navigation with Formation Adaptation
2404.01618
0
0
Abstract
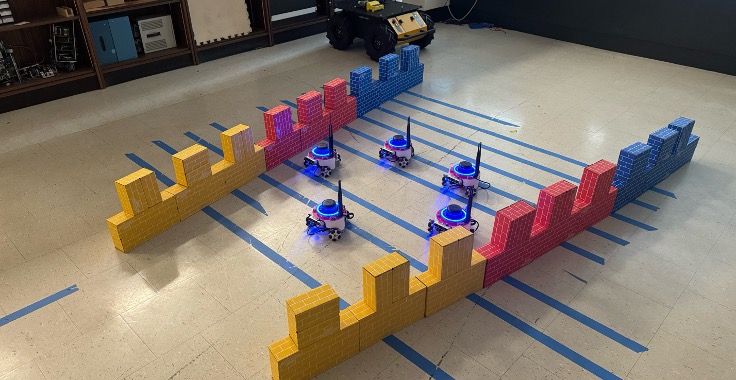
Multi-robot collaborative navigation is an essential ability where teamwork and synchronization are keys. In complex and uncertain environments, adaptive formation is vital, as rigid formations prove to be inadequate. The ability of robots to dynamically adjust their formation enables navigation through unpredictable spaces, maintaining cohesion, and effectively responding to environmental challenges. In this paper, we introduce a novel approach that uses bi-level learning framework. Specifically, we use graph learning at a high level for group coordination and reinforcement learning for individual navigation. We innovate by integrating a spring-damper model within the reinforcement learning reward mechanism, addressing the rigidity of traditional formation control methods. During execution, our approach enables a team of robots to successfully navigate challenging environments, maintain a desired formation shape, and dynamically adjust their formation scale based on environmental information. We conduct extensive experiments to evaluate our approach across three distinct formation scenarios in multi-robot navigation: circle, line, and wedge. Experimental results show that our approach achieves promising results and scalability on multi-robot navigation with formation adaptation.
Create account to get full access
Overview
- This paper presents a new approach for multi-robot collaborative navigation that allows the robots to adapt their formation as they navigate through different environments.
- The system uses a decentralized control architecture to coordinate the robots' movements and dynamically adjust their positions within the formation.
- Key innovations include techniques for detecting environmental changes and computing optimized formations in real-time.
Plain English Explanation
This research focuses on enabling groups of robots to work together effectively as they navigate through different surroundings. The challenge is that as the robots move, the best arrangement or "formation" of the group may need to change based on the environment.
Imagine you and some friends are exploring a cave. You might start out walking in a line, but then need to switch to a more spread out formation to safely navigate narrow passages. The robots in this system can similarly adapt their positions to handle things like obstacles, narrow spaces, or uneven terrain.
The researchers developed a decentralized control system that allows each robot to independently monitor the environment and make adjustments to the group's formation. This avoids the need for a central commander robot telling everyone what to do. Instead, the robots communicate and coordinate with each other in real-time.
By continually optimizing the formation, the robots can travel more efficiently and safely through complex environments. This type of adaptive, collaborative navigation could be very useful for search and rescue missions, infrastructure inspection, or exploration of hazardous areas.
Technical Explanation
The core of the approach is a decentralized, multi-agent control system. Each robot monitors its local environment and shares sensor data with its neighbors. This allows the robots to collectively build an understanding of the overall situation and optimize their formation accordingly.
The key technical components include:
- Formation Representation: The robots use a flexible, parametric representation of their formation that can be optimized in real-time.
- Formation Adaptation: Algorithms detect changes in the environment and compute new optimal formations, coordinating the robots' movements to transition between them.
- Communication and Coordination: Robots share sensor data and formation plans, using consensus-based protocols to ensure consistent decision making.
Experiments demonstrated the system's ability to navigate through diverse environments, including narrow passages, obstacles, and uneven terrain. The results showed improved efficiency, robustness, and cohesion compared to fixed formations.
Critical Analysis
The paper provides a thorough evaluation of the proposed approach, including comparisons to baseline methods. However, the experiments were conducted in simulation rather than with physical robots. Validating the system's performance in real-world conditions would be an important next step.
Additionally, the communication and coordination protocols assumed a reliable, low-latency network. Dealing with more realistic communication challenges, such as intermittent connectivity or message delays, could introduce new complexities. Further research would be needed to ensure robust operation in less ideal conditions.
While the formation adaptation techniques are quite general, the specific optimization objectives and constraints were tailored to the navigation task. Extending the approach to support a wider range of multi-robot coordination problems, such as search and rescue or warehouse logistics, may require further advancements.
Conclusion
This research presents an innovative solution for enabling teams of robots to collaboratively navigate through changing environments. By dynamically adapting their formation, the robots can move more efficiently and safely compared to using fixed arrangements.
The decentralized, sensor-driven control architecture is a promising step towards more flexible and resilient multi-robot systems. With further development and real-world validation, this type of adaptive navigation could enable new applications in areas like infrastructure inspection, disaster response, and planetary exploration.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔎
Collaborative Safe Formation Control for Coupled Multi-Agent Systems
Brooks A. Butler, Chi Ho Leung, Philip E. Par'e
0
0
The safe control of multi-robot swarms is a challenging and active field of research, where common goals include maintaining group cohesion while simultaneously avoiding obstacles and inter-agent collision. Building off our previously developed theory for distributed collaborative safety-critical control for networked dynamic systems, we propose a distributed algorithm for the formation control of robot swarms given individual agent dynamics, induced formation dynamics, and local neighborhood position and velocity information within a defined sensing radius for each agent. Individual safety guarantees for each agent are obtained using rounds of communication between neighbors to restrict unsafe control actions among cooperating agents through safety conditions derived from high-order control barrier functions. We provide conditions under which a swarm is guaranteed to achieve collective safety with respect to multiple obstacles using a modified collaborative safety algorithm. We demonstrate the performance of our distributed algorithm via simulation in a simplified physics-based environment.
4/3/2024

Learning Robust Autonomous Navigation and Locomotion for Wheeled-Legged Robots
Joonho Lee, Marko Bjelonic, Alexander Reske, Lorenz Wellhausen, Takahiro Miki, Marco Hutter
0
0
Autonomous wheeled-legged robots have the potential to transform logistics systems, improving operational efficiency and adaptability in urban environments. Navigating urban environments, however, poses unique challenges for robots, necessitating innovative solutions for locomotion and navigation. These challenges include the need for adaptive locomotion across varied terrains and the ability to navigate efficiently around complex dynamic obstacles. This work introduces a fully integrated system comprising adaptive locomotion control, mobility-aware local navigation planning, and large-scale path planning within the city. Using model-free reinforcement learning (RL) techniques and privileged learning, we develop a versatile locomotion controller. This controller achieves efficient and robust locomotion over various rough terrains, facilitated by smooth transitions between walking and driving modes. It is tightly integrated with a learned navigation controller through a hierarchical RL framework, enabling effective navigation through challenging terrain and various obstacles at high speed. Our controllers are integrated into a large-scale urban navigation system and validated by autonomous, kilometer-scale navigation missions conducted in Zurich, Switzerland, and Seville, Spain. These missions demonstrate the system's robustness and adaptability, underscoring the importance of integrated control systems in achieving seamless navigation in complex environments. Our findings support the feasibility of wheeled-legged robots and hierarchical RL for autonomous navigation, with implications for last-mile delivery and beyond.
5/6/2024

Distributed Autonomous Swarm Formation for Dynamic Network Bridging
Raffaele Galliera, Thies Mohlenhof, Alessandro Amato, Daniel Duran, Kristen Brent Venable, Niranjan Suri
0
0
Effective operation and seamless cooperation of robotic systems are a fundamental component of next-generation technologies and applications. In contexts such as disaster response, swarm operations require coordinated behavior and mobility control to be handled in a distributed manner, with the quality of the agents' actions heavily relying on the communication between them and the underlying network. In this paper, we formulate the problem of dynamic network bridging in a novel Decentralized Partially Observable Markov Decision Process (Dec-POMDP), where a swarm of agents cooperates to form a link between two distant moving targets. Furthermore, we propose a Multi-Agent Reinforcement Learning (MARL) approach for the problem based on Graph Convolutional Reinforcement Learning (DGN) which naturally applies to the networked, distributed nature of the task. The proposed method is evaluated in a simulated environment and compared to a centralized heuristic baseline showing promising results. Moreover, a further step in the direction of sim-to-real transfer is presented, by additionally evaluating the proposed approach in a near Live Virtual Constructive (LVC) UAV framework.
4/3/2024

Multi-Robot Cooperative Socially-Aware Navigation Using Multi-Agent Reinforcement Learning
Weizheng Wang, Le Mao, Ruiqi Wang, Byung-Cheol Min
0
0
In public spaces shared with humans, ensuring multi-robot systems navigate without collisions while respecting social norms is challenging, particularly with limited communication. Although current robot social navigation techniques leverage advances in reinforcement learning and deep learning, they frequently overlook robot dynamics in simulations, leading to a simulation-to-reality gap. In this paper, we bridge this gap by presenting a new multi-robot social navigation environment crafted using Dec-POSMDP and multi-agent reinforcement learning. Furthermore, we introduce SAMARL: a novel benchmark for cooperative multi-robot social navigation. SAMARL employs a unique spatial-temporal transformer combined with multi-agent reinforcement learning. This approach effectively captures the complex interactions between robots and humans, thus promoting cooperative tendencies in multi-robot systems. Our extensive experiments reveal that SAMARL outperforms existing baseline and ablation models in our designed environment. Demo videos for this work can be found at: https://sites.google.com/view/samarl
5/17/2024