Multi-Stage Fusion Architecture for Small-Drone Localization and Identification Using Passive RF and EO Imagery: A Case Study
2406.16875
0
0
📊
Abstract
Reliable detection, localization and identification of small drones is essential to promote safe, secure and privacy-respecting operation of Unmanned-Aerial Systems (UAS), or simply, drones. This is an increasingly challenging problem with only single modality sensing, especially, to detect and identify small drones. In this work, a multi-stage fusion architecture using passive radio frequency (RF) and electro-optic (EO) imagery data is developed to leverage the synergies of the modalities to improve the overall tracking and classification capabilities. For detection with EO-imagery, supervised deep learning based techniques as well as unsupervised foreground/background separation techniques are explored to cope with challenging environments. Using real collected data for Group 1 and 2 drones, the capability of each algorithm is quantified. In order to compensate for any performance gaps in detection with only EO imagery as well as to provide a unique device identifier for the drones, passive RF is integrated with EO imagery whenever available. In particular, drone detections in the image plane are combined with passive RF location estimates via detection-to-detection association after 3D to 2D transformation. Final tracking is performed on the composite detections in the 2D image plane. Each track centroid is given a unique identification obtained via RF fingerprinting. The proposed fusion architecture is tested and the tracking and performance is quantified over the range to illustrate the effectiveness of the proposed approaches using simultaneously collected passive RF and EO data at the Air Force Research Laboratory (AFRL) through ESCAPE-21 (Experiments, Scenarios, Concept of Operations, and Prototype Engineering) data collect
Create account to get full access
Overview
- This research paper explores the use of a multi-modal sensor fusion approach to reliably detect, locate, and identify small drones.
- The approach combines passive radio frequency (RF) and electro-optic (EO) imagery data to leverage the strengths of each modality and improve overall tracking and classification capabilities.
- The paper investigates techniques for drone detection using EO imagery, including supervised deep learning and unsupervised foreground/background separation.
- It also describes how passive RF data is integrated with EO detections to provide unique device identification and overcome performance gaps in EO-only detection.
Plain English Explanation
Detecting and identifying small drones is an important challenge for ensuring the safe and secure operation of unmanned aerial systems (UAS), commonly known as drones. Using a single type of sensor, such as cameras or radio signals, can be difficult, especially for small drones. This research explores a solution that combines data from two different types of sensors: passive radio frequency (RF) and electro-optic (EO) cameras.
The C2F Drone and FederFusionNet approaches demonstrate how combining different sensor modalities can improve drone detection and tracking. In this case, the researchers use deep learning techniques on the EO camera data to detect drones, and then integrate that information with the passive RF data to better identify the specific drone being tracked.
The survey on deep learning-based radar-vision fusion and clustering-based learning for UAV tracking and pose estimation provide additional context on how multi-modal sensor fusion can enhance drone detection and tracking capabilities.
By combining the strengths of both EO and RF data, the researchers aim to create a more reliable and accurate system for detecting, locating, and identifying small drones, which is crucial for ensuring the safe and responsible use of this technology.
Technical Explanation
The research paper presents a multi-stage fusion architecture that leverages passive RF and EO imagery data to improve the detection, localization, and identification of small drones. For the EO-based detection, the researchers explore both supervised deep learning techniques and unsupervised foreground/background separation methods to handle challenging environmental conditions.
To compensate for any performance gaps in EO-only detection and to provide unique device identification for the drones, the passive RF data is integrated with the EO imagery whenever available. Specifically, the drone detections in the image plane are combined with the passive RF location estimates through a detection-to-detection association process after 3D to 2D transformation. This composite detection information is then used for the final tracking in the 2D image plane, and each track centroid is assigned a unique identification obtained via RF fingerprinting.
The proposed fusion architecture is tested and evaluated using simultaneously collected passive RF and EO data from the Air Force Research Laboratory (AFRL) ESCAPE-21 data collection. The tracking performance and effectiveness of the proposed approaches are quantified over different ranges to demonstrate the benefits of the multi-modal sensor fusion strategy.
Critical Analysis
The research presented in the paper provides a promising approach to the challenging problem of small drone detection, localization, and identification. The integration of passive RF and EO data leverages the strengths of each modality and helps overcome the limitations of single-modality sensing.
However, the paper does not provide a comprehensive evaluation of the proposed approach in real-world scenarios with various environmental conditions, drone sizes, and operational settings. Additionally, the performance of the deep learning-based EO detection techniques and the accuracy of the RF fingerprinting for unique device identification could be further explored and validated.
The paper also does not address potential privacy concerns or legal implications of the proposed multi-modal drone tracking system, which would be an important consideration for the deployment and adoption of such technology. Fusing active and passive acoustic sensing for simultaneous localization could provide additional insights on addressing these concerns.
Overall, the research represents a valuable contribution to the field of UAS security and safety, but further investigation and validation of the approach in diverse operational contexts would be beneficial to ensure its robust and responsible implementation.
Conclusion
This research paper proposes a multi-modal sensor fusion approach to reliably detect, locate, and identify small drones. By combining passive RF and EO imagery data, the researchers aim to leverage the strengths of each modality and improve the overall tracking and classification capabilities.
The key innovations of the work include the exploration of deep learning and unsupervised techniques for drone detection using EO imagery, as well as the integration of passive RF data to provide unique device identification and overcome performance gaps in EO-only detection.
The proposed fusion architecture has been tested and evaluated using real-world data, demonstrating the potential benefits of this multi-modal approach. However, further research is needed to address the limitations and expand the evaluation to diverse operational scenarios, while also considering the ethical and legal implications of such drone tracking systems.
Overall, this research represents an important step towards enhancing the safe and secure operation of unmanned aerial systems, which is crucial as the use of drones continues to grow in various applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Robust Low-Cost Drone Detection and Classification in Low SNR Environments
Stefan Gluge, Matthias Nyfeler, Ahmad Aghaebrahimian, Nicola Ramagnano, Christof Schupbach
0
0
The proliferation of drones, or unmanned aerial vehicles (UAVs), has raised significant safety concerns due to their potential misuse in activities such as espionage, smuggling, and infrastructure disruption. This paper addresses the critical need for effective drone detection and classification systems that operate independently of UAV cooperation. We evaluate various convolutional neural networks (CNNs) for their ability to detect and classify drones using spectrogram data derived from consecutive Fourier transforms of signal components. The focus is on model robustness in low signal-to-noise ratio (SNR) environments, which is critical for real-world applications. A comprehensive dataset is provided to support future model development. In addition, we demonstrate a low-cost drone detection system using a standard computer, software-defined radio (SDR) and antenna, validated through real-world field testing. On our development dataset, all models consistently achieved an average balanced classification accuracy of >= 85% at SNR > -12dB. In the field test, these models achieved an average balance accuracy of > 80%, depending on transmitter distance and antenna direction. Our contributions include: a publicly available dataset for model development, a comparative analysis of CNN for drone detection under low SNR conditions, and the deployment and field evaluation of a practical, low-cost detection system.
6/28/2024
🔎
C2FDrone: Coarse-to-Fine Drone-to-Drone Detection using Vision Transformer Networks
Sairam VC Rebbapragada, Pranoy Panda, Vineeth N Balasubramanian
0
0
A vision-based drone-to-drone detection system is crucial for various applications like collision avoidance, countering hostile drones, and search-and-rescue operations. However, detecting drones presents unique challenges, including small object sizes, distortion, occlusion, and real-time processing requirements. Current methods integrating multi-scale feature fusion and temporal information have limitations in handling extreme blur and minuscule objects. To address this, we propose a novel coarse-to-fine detection strategy based on vision transformers. We evaluate our approach on three challenging drone-to-drone detection datasets, achieving F1 score enhancements of 7%, 3%, and 1% on the FL-Drones, AOT, and NPS-Drones datasets, respectively. Additionally, we demonstrate real-time processing capabilities by deploying our model on an edge-computing device. Our code will be made publicly available.
5/1/2024
A Survey of Deep Learning Based Radar and Vision Fusion for 3D Object Detection in Autonomous Driving
Di Wu, Feng Yang, Benlian Xu, Pan Liao, Bo Liu
0
0
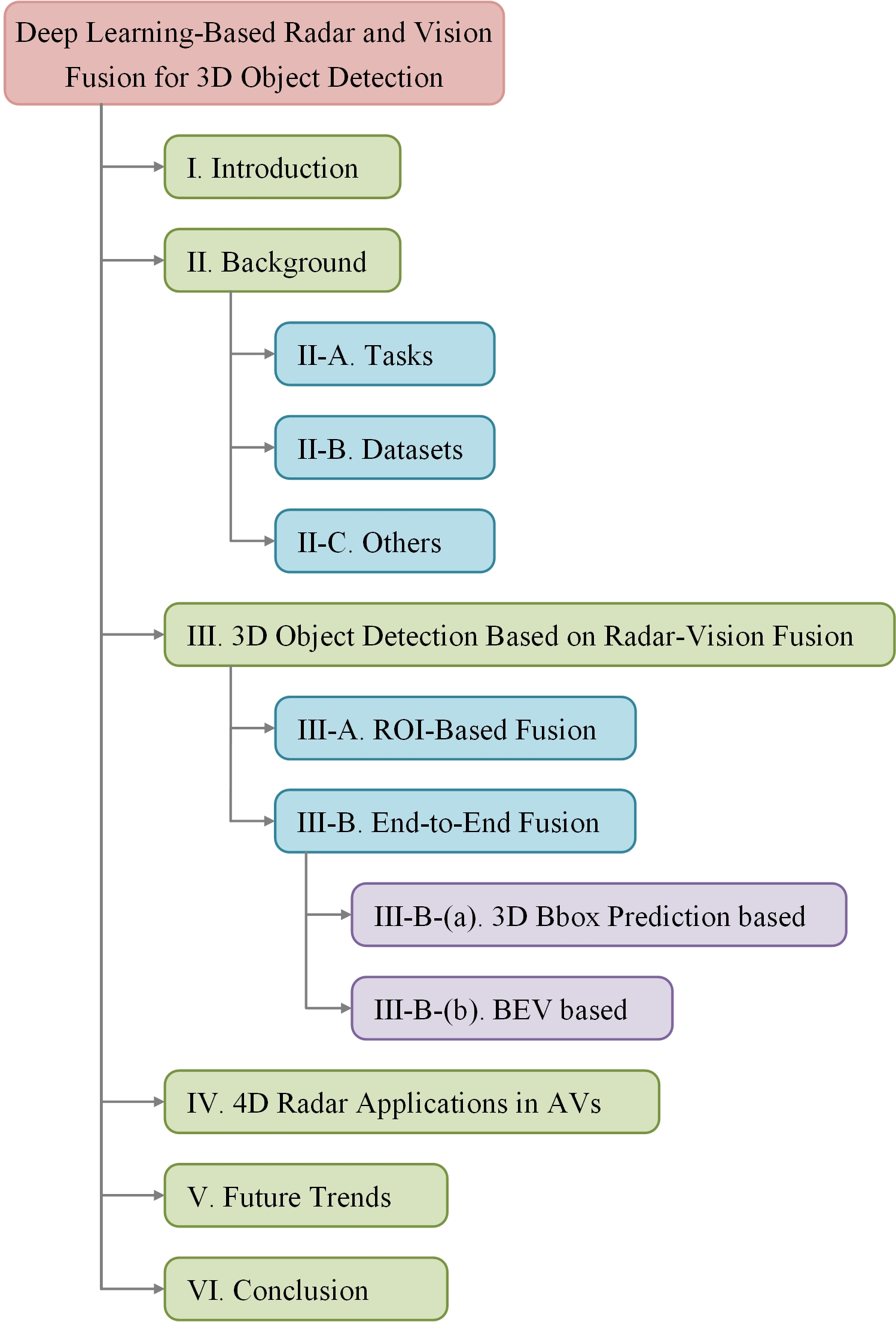
With the rapid advancement of autonomous driving technology, there is a growing need for enhanced safety and efficiency in the automatic environmental perception of vehicles during their operation. In modern vehicle setups, cameras and mmWave radar (radar), being the most extensively employed sensors, demonstrate complementary characteristics, inherently rendering them conducive to fusion and facilitating the achievement of both robust performance and cost-effectiveness. This paper focuses on a comprehensive survey of radar-vision (RV) fusion based on deep learning methods for 3D object detection in autonomous driving. We offer a comprehensive overview of each RV fusion category, specifically those employing region of interest (ROI) fusion and end-to-end fusion strategies. As the most promising fusion strategy at present, we provide a deeper classification of end-to-end fusion methods, including those 3D bounding box prediction based and BEV based approaches. Moreover, aligning with recent advancements, we delineate the latest information on 4D radar and its cutting-edge applications in autonomous vehicles (AVs). Finally, we present the possible future trends of RV fusion and summarize this paper.
6/4/2024

YOLO-FEDER FusionNet: A Novel Deep Learning Architecture for Drone Detection
Tamara R. Lenhard, Andreas Weinmann, Stefan Jager, Tobias Koch
0
0
Predominant methods for image-based drone detection frequently rely on employing generic object detection algorithms like YOLOv5. While proficient in identifying drones against homogeneous backgrounds, these algorithms often struggle in complex, highly textured environments. In such scenarios, drones seamlessly integrate into the background, creating camouflage effects that adversely affect the detection quality. To address this issue, we introduce a novel deep learning architecture called YOLO-FEDER FusionNet. Unlike conventional approaches, YOLO-FEDER FusionNet combines generic object detection methods with the specialized strength of camouflage object detection techniques to enhance drone detection capabilities. Comprehensive evaluations of YOLO-FEDER FusionNet show the efficiency of the proposed model and demonstrate substantial improvements in both reducing missed detections and false alarms.
6/18/2024