Multi-UAV Enabled MEC Networks: Optimizing Delay through Intelligent 3D Trajectory Planning and Resource Allocation

0

Sign in to get full access
Overview
- Mobile Edge Computing (MEC) and Unmanned Aerial Vehicles (UAVs) are combined to create an efficient multi-UAV enabled MEC network
- This paper proposes a solution to optimize delay in this network through 3D trajectory planning and resource allocation
- The solution uses multi-agent deep reinforcement learning to intelligently manage the UAVs and computing resources
Plain English Explanation
In this research, the authors have combined Mobile Edge Computing (MEC) and Unmanned Aerial Vehicles (UAVs) to create a more efficient network. MEC brings cloud computing capabilities closer to end-users, reducing latency. UAVs can act as mobile base stations, further improving connectivity.
The key innovation is using 3D trajectory planning and resource allocation to optimize the delay experienced by users in this multi-UAV enabled MEC network. The authors use multi-agent deep reinforcement learning to intelligently manage the movement of the UAVs and allocation of computing resources.
Technical Explanation
The proposed solution consists of three main components:
-
3D Trajectory Planning: The UAVs dynamically plan their 3D trajectories to ensure optimal coverage and minimize the distance between users and their serving UAVs. This is formulated as a multi-agent optimization problem.
-
Task Offloading: Users can offload computationally intensive tasks to the MEC servers hosted on the UAVs. The system intelligently decides which tasks to offload and to which UAV, considering factors like task requirements, UAV capabilities, and network conditions.
-
Multi-Agent Deep Reinforcement Learning: A multi-agent deep reinforcement learning algorithm is used to jointly optimize the 3D trajectory planning and task offloading. The agents learn the optimal policies through interaction with the environment, without requiring prior knowledge.
The authors developed a comprehensive simulation environment to evaluate the proposed solution. They compared its performance to various baselines in terms of key metrics like service delay, energy consumption, and task completion rate. The results demonstrate significant improvements over the benchmark approaches.
Critical Analysis
The paper provides a well-designed and comprehensive solution for optimizing delay in multi-UAV enabled MEC networks. The authors have thoughtfully addressed the key challenges, including the complex 3D trajectory planning and the need for intelligent resource allocation.
One potential limitation is the reliance on simulation-based evaluation. While the simulation environment appears to be robust, real-world deployments may face additional challenges not captured in the model. It would be valuable to see the performance of the proposed solution in actual field trials.
Additionally, the authors do not delve into the computational complexity of the multi-agent deep reinforcement learning algorithm. As the number of UAVs and users grows, the training and decision-making processes may become computationally intensive, potentially limiting the scalability of the approach.
Overall, this paper presents a promising and innovative solution that could significantly improve the performance of MEC networks by leveraging the capabilities of UAVs. Further research and real-world validation would help solidify the practical applicability of this work.
Conclusion
This research combines Mobile Edge Computing (MEC) and Unmanned Aerial Vehicles (UAVs) to create a multi-UAV enabled MEC network that can optimize service delay. The key innovation is the use of 3D trajectory planning and multi-agent deep reinforcement learning to intelligently manage the UAVs and computing resources.
This approach has the potential to significantly improve the performance of MEC networks, particularly in terms of reducing latency for end-users. While the simulation-based evaluation is promising, further research and real-world validation would help solidify the practical applicability of this work.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Multi-UAV Enabled MEC Networks: Optimizing Delay through Intelligent 3D Trajectory Planning and Resource Allocation
Zhiying Wang, Tianxi Wei, Gang Sun, Xinyue Liu, Hongfang Yu, Dusit Niyato
Mobile Edge Computing (MEC) reduces the computational burden on terminal devices by shortening the distance between these devices and computing nodes. Integrating Unmanned Aerial Vehicles (UAVs) with enhanced MEC networks can leverage the high mobility of UAVs to flexibly adjust network topology, further expanding the applicability of MEC. However, in highly dynamic and complex real-world environments, it is crucial to balance task offloading effectiveness with algorithm performance. This paper investigates a multi-UAV communication network equipped with edge computing nodes to assist terminal users in task computation. Our goal is to reduce the task processing delay for users through the joint optimization of discrete computation modes, continuous 3D trajectories, and resource assignment. To address the challenges posed by the mixed action space, we propose a Multi-UAV Edge Computing Resource Scheduling (MUECRS) algorithm, which comprises two key components: 1) trajectory optimization, and 2) computation mode and resource management. Experimental results demonstrate our method effectively designs the 3D flight trajectories of UAVs, enabling rapid terminal coverage. Furthermore, the proposed algorithm achieves efficient resource deployment and scheduling, outperforming comparative algorithms by at least 16.7%, demonstrating superior adaptability and robustness.
Read more9/27/2024

0
Koopman based trajectory model and computation offloading for high mobility paradigm in ISAC enabled IoT system
Minh-Tuan Tran
User experience on mobile devices is constrained by limited battery capacity and processing power, but 6G technology advancements are diving rapidly into mobile technical evolution. Mobile edge computing (MEC) offers a solution, offloading computationally intensive tasks to edge cloud servers, reducing battery drain compared to local processing. The upcoming integrated sensing and communication in mobile communication may improve the trajectory prediction and processing delays. This study proposes a greedy resource allocation optimization strategy for multi-user networks to minimize aggregate energy usage. Numerical results show potential improvement at 33% for every 1000 iteration. Addressing prediction model division and velocity accuracy issues is crucial for better results. A plan for further improvement and achieving objectives is outlined for the upcoming work phase.
Read more7/1/2024
0
Multi-Objective Offloading Optimization in MEC and Vehicular-Fog Systems: A Distributed-TD3 Approach
Frezer Guteta Wakgra, Binayak Kar, Seifu Birhanu Tadele, Shan-Hsiang Shen, Asif Uddin Khan
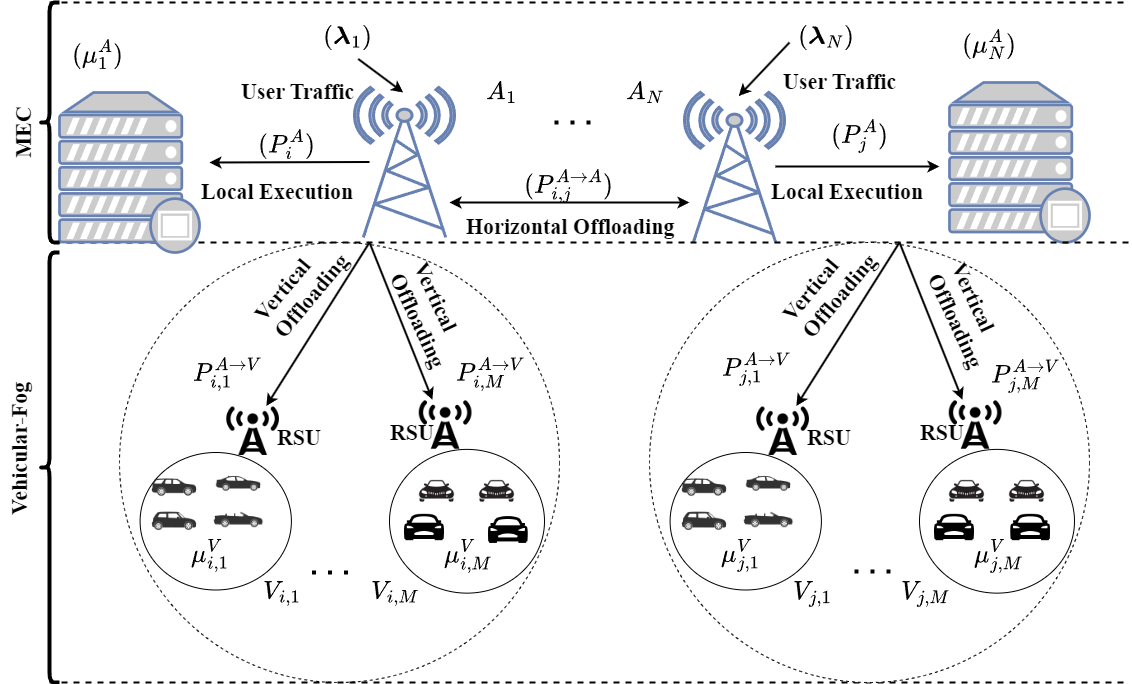
The emergence of 5G networks has enabled the deployment of a two-tier edge and vehicular-fog network. It comprises Multi-access Edge Computing (MEC) and Vehicular-Fogs (VFs), strategically positioned closer to Internet of Things (IoT) devices, reducing propagation latency compared to cloud-based solutions and ensuring satisfactory quality of service (QoS). However, during high-traffic events like concerts or athletic contests, MEC sites may face congestion and become overloaded. Utilizing offloading techniques, we can transfer computationally intensive tasks from resource-constrained devices to those with sufficient capacity, for accelerating tasks and extending device battery life. In this research, we consider offloading within a two-tier MEC and VF architecture, involving offloading from MEC to MEC and from MEC to VF. The primary objective is to minimize the average system cost, considering both latency and energy consumption. To achieve this goal, we formulate a multi-objective optimization problem aimed at minimizing latency and energy while considering given resource constraints. To facilitate decision-making for nearly optimal computational offloading, we design an equivalent reinforcement learning environment that accurately represents the network architecture and the formulated problem. To accomplish this, we propose a Distributed-TD3 (DTD3) approach, which builds on the TD3 algorithm. Extensive simulations, demonstrate that our strategy achieves faster convergence and higher efficiency compared to other benchmark solutions.
Read more4/22/2024
📈
0
Digital Twin-Empowered Task Assignment in Aerial MEC Network: A Resource Coalition Cooperation Approach with Generative Model
Xin Tang, Qian Chen, Rong Yu, Xiaohuan Li
To meet the demands for ubiquitous communication and temporary edge computing in 6G networks, aerial mobile edge computing (MEC) networks have been envisioned as a new paradigm. However, dynamic user requests pose challenges for task assignment strategies. Most of the existing research assumes that the strategy is deployed on ground-based stations or UAVs, which will be ineffective in an environment lacking infrastructure and continuous energy supply. Moreover, the resource mutual exclusion problem of dynamic task assignment has not been effectively solved. Toward this end, we introduce the digital twin (DT) into the aerial MEC network to study the resource coalition cooperation approach with the generative model (GM), which provides a preliminary coalition structure for the coalition game. Specifically, we propose a novel network framework that is composed of an application plane, a physical plane, and a virtual plane. After that, the task assignment problem is simplified to convex optimization programming with linear constraints. And then, we also propose a resource coalition cooperation approach that is based on a transferable utility (TU) coalition game to obtain an approximate optimal solution. Numerical results confirm the effectiveness of our proposed approach in terms of energy consumption and utilization of resources.
Read more8/2/2024