Navigating Connected Car Cybersecurity: Location Anomaly Detection with RAN Data

0

Sign in to get full access
Overview
- The paper explores the use of radio access network (RAN) data to detect location anomalies in connected cars, a critical aspect of connected car cybersecurity.
- It proposes a novel approach that leverages RAN data to identify potential security threats by detecting deviations from normal vehicle movement patterns.
- The research aims to enhance the security of connected car systems and mitigate the risks associated with location-based cyberattacks.
Plain English Explanation
The paper focuses on a problem called location anomaly detection in connected cars. Connected cars are vehicles that can communicate with other devices and the internet, which can make them vulnerable to cyberattacks.
One type of attack that connected cars can face is a location-based attack, where an attacker tries to make the car think it is in a different location than it really is. This could be used, for example, to trick the car into taking a different route or performing certain actions that the attacker wants.
To address this issue, the researchers propose using data from the car's radio access network (RAN) to detect when a car's location is not normal or expected. The RAN is the part of the cellular network that the car uses to communicate wirelessly.
By analyzing patterns in the RAN data, the researchers' approach can identify when a car's location is significantly different from what would be expected based on its normal driving behavior. This could help detect and prevent location-based attacks on connected cars, improving the overall cybersecurity of these vehicles.
Technical Explanation
The paper presents a novel approach for detecting location anomalies in connected cars using radio access network (RAN) data. The key idea is to leverage the rich information available in RAN data, such as signal strength, cell handover events, and other cellular network metrics, to identify deviations from a vehicle's expected location and movement patterns.
The researchers develop a systematic framework for assessing anomaly detectors in the context of connected and autonomous vehicles. They evaluate their proposed RAN-based location anomaly detection approach using real-world driving data collected from numerous vehicles. The results demonstrate the effectiveness of their method in accurately identifying location anomalies that could be indicative of GPS spoofing attacks or other location-based cybersecurity threats.
The authors also highlight the potential for integrating their approach with AI-driven intrusion detection systems to provide a more comprehensive cybersecurity solution for connected cars. By leveraging RAN data, the proposed technique can complement existing GPS-based anomaly detection methods, leading to a more robust and reliable system for safeguarding connected vehicles against location-based cyber threats.
Critical Analysis
The paper presents a compelling approach to addressing the critical issue of location anomaly detection in connected cars. The authors' use of RAN data as an additional source of information to supplement GPS-based techniques is a promising direction, as it can help overcome some of the limitations of GPS-based methods, such as vulnerability to spoofing attacks.
However, the authors acknowledge that their approach has certain limitations. For example, the effectiveness of the method may be influenced by factors such as the quality and coverage of the cellular network, as well as potential variations in vehicle-to-network interactions under different driving conditions. Additionally, the authors suggest that further research is needed to investigate the integration of their RAN-based approach with other AI-driven intrusion detection systems for a more comprehensive cybersecurity solution.
It would also be valuable to explore the potential for cross-validation and benchmarking of the proposed anomaly detection techniques across diverse datasets and driving scenarios, as this could help strengthen the generalizability and robustness of the approach.
Conclusion
This paper presents a novel approach for detecting location anomalies in connected cars using radio access network (RAN) data. By leveraging the rich information available in cellular network metrics, the proposed method can effectively identify deviations from a vehicle's expected location and movement patterns, which could be indicative of location-based cyberattacks.
The research contributes to the broader field of connected car cybersecurity by providing a complementary technique to existing GPS-based anomaly detection methods. The authors also highlight the potential for integrating their RAN-based approach with AI-driven intrusion detection systems to create a more comprehensive security solution for safeguarding connected vehicles against location-based cyber threats.
As connected car technology continues to evolve, the insights and methodologies presented in this paper can contribute to the ongoing efforts to enhance the cybersecurity of these vehicles, ensuring their safe and reliable operation in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Navigating Connected Car Cybersecurity: Location Anomaly Detection with RAN Data
Feng Wang, Yaron Koral, Kenichi Futamura
The cybersecurity of connected cars, integral to the broader Internet of Things (IoT) landscape, has become of paramount concern. Cyber-attacks, including hijacking and spoofing, pose significant threats to these technological advancements, potentially leading to unauthorized control over vehicular networks or creating deceptive identities. Given the difficulty of deploying comprehensive defensive logic across all vehicles, this paper presents a novel approach for identifying potential attacks through Radio Access Network (RAN) event monitoring. The major contribution of this paper is a location anomaly detection module that identifies aberrant devices that appear in multiple locations simultaneously - a potential indicator of a hijacking attack. We demonstrate how RAN-event based location anomaly detection is effective in combating malicious activity targeting connected cars. Using RAN data generated by tens of millions of connected cars, we developed a fast and efficient method for identifying potential malicious or rogue devices. The implications of this research are far-reaching. By increasing the security of connected cars, we can enhance the safety of users, provide robust defenses for the automotive industry, and improve overall cybersecurity practices for IoT devices.
Read more7/4/2024
❗
0
Systematic Review: Anomaly Detection in Connected and Autonomous Vehicles
J. R. V. Solaas, N. Tuptuk, E. Mariconti
This systematic review focuses on anomaly detection for connected and autonomous vehicles. The initial database search identified 2160 articles, of which 203 were included in this review after rigorous screening and assessment. This study revealed that the most commonly used Artificial Intelligence (AI) algorithms employed in anomaly detection are neural networks like LSTM, CNN, and autoencoders, alongside one-class SVM. Most anomaly-based models were trained using real-world operational vehicle data, although anomalies, such as attacks and faults, were often injected artificially into the datasets. These models were evaluated mostly using five key evaluation metrics: recall, accuracy, precision, F1-score, and false positive rate. The most frequently used selection of evaluation metrics used for anomaly detection models were accuracy, precision, recall, and F1-score. This systematic review presents several recommendations. First, there is a need to incorporate multiple evaluation metrics to provide a comprehensive assessment of the anomaly detection models. Second, only a small proportion of the studies have made their models open source, indicating a need to share models publicly to facilitate collaboration within the research community, and to validate and compare findings effectively. Third, there is a need for benchmarking datasets with predefined anomalies or cyberattacks to test and improve the effectiveness of the proposed anomaly-based detection models. Furthermore, there is a need for future research to investigate the deployment of anomaly detection to a vehicle to assess its performance on the road. There is a notable lack of research done on intrusion detection systems using different protocols to CAN, such as Ethernet and FlexRay.
Read more5/7/2024
0
A Framework for the Systematic Assessment of Anomaly Detectors in Time-Sensitive Automotive Networks
Philipp Meyer, Timo Hackel, Teresa Lubeck, Franz Korf, Thomas C. Schmidt
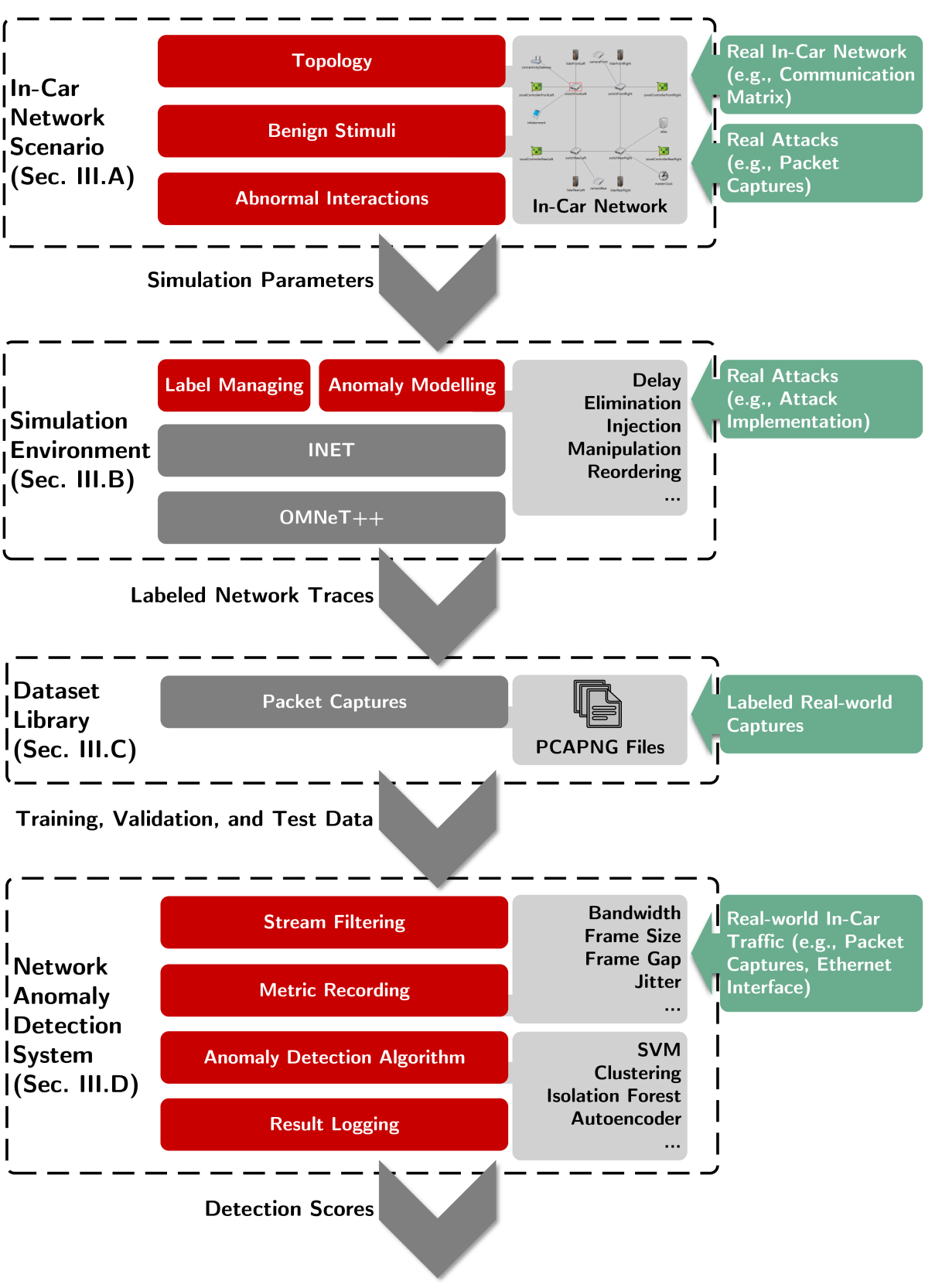
Connected cars are susceptible to cyberattacks. Security and safety of future vehicles highly depend on a holistic protection of automotive components, of which the time-sensitive backbone network takes a significant role. These onboard Time-Sensitive Networks (TSNs) require monitoring for safety and -- as versatile platforms to host Network Anomaly Detection Systems (NADSs) -- for security. Still a thorough evaluation of anomaly detection methods in the context of hard real-time operations, automotive protocol stacks, and domain specific attack vectors is missing along with appropriate input datasets. In this paper, we present an assessment framework that allows for reproducible, comparable, and rapid evaluation of detection algorithms. It is based on a simulation toolchain, which contributes configurable topologies, traffic streams, anomalies, attacks, and detectors. We demonstrate the assessment of NADSs in a comprehensive in-vehicular network with its communication flows, on which we model traffic anomalies. We evaluate exemplary detection mechanisms and reveal how the detection performance is influenced by different combinations of TSN traffic flows and anomaly types. Our approach translates to other real-time Ethernet domains, such as industrial facilities, airplanes, and UAVs.
Read more5/3/2024
🔎
0
GPS-IDS: An Anomaly-based GPS Spoofing Attack Detection Framework for Autonomous Vehicles
Murad Mehrab Abrar, Raian Islam, Shalaka Satam, Sicong Shao, Salim Hariri, Pratik Satam
Autonomous Vehicles (AVs) heavily rely on sensors and communication networks like Global Positioning System (GPS) to navigate autonomously. Prior research has indicated that networks like GPS are vulnerable to cyber-attacks such as spoofing and jamming, thus posing serious risks like navigation errors and system failures. These threats are expected to intensify with the widespread deployment of AVs, making it crucial to detect and mitigate such attacks. This paper proposes GPS Intrusion Detection System, or GPS-IDS, an Anomaly Behavior Analysis (ABA)-based intrusion detection framework to detect GPS spoofing attacks on AVs. The framework uses a novel physics-based vehicle behavior model where a GPS navigation model is integrated into the conventional dynamic bicycle model for accurate AV behavior representation. Temporal features derived from this behavior model are analyzed using machine learning to detect normal and abnormal navigation behavior. The performance of the GPS-IDS framework is evaluated on the AV-GPS-Dataset - a real-world dataset collected by the team using an AV testbed. The dataset has been publicly released for the global research community. To the best of our knowledge, this dataset is the first of its kind and will serve as a useful resource to address such security challenges.
Read more5/15/2024