NeRF-Feat: 6D Object Pose Estimation using Feature Rendering
2406.13796
0
0

Abstract
Object Pose Estimation is a crucial component in robotic grasping and augmented reality. Learning based approaches typically require training data from a highly accurate CAD model or labeled training data acquired using a complex setup. We address this by learning to estimate pose from weakly labeled data without a known CAD model. We propose to use a NeRF to learn object shape implicitly which is later used to learn view-invariant features in conjunction with CNN using a contrastive loss. While NeRF helps in learning features that are view-consistent, CNN ensures that the learned features respect symmetry. During inference, CNN is used to predict view-invariant features which can be used to establish correspondences with the implicit 3d model in NeRF. The correspondences are then used to estimate the pose in the reference frame of NeRF. Our approach can also handle symmetric objects unlike other approaches using a similar training setup. Specifically, we learn viewpoint invariant, discriminative features using NeRF which are later used for pose estimation. We evaluated our approach on LM, LM-Occlusion, and T-Less dataset and achieved benchmark accuracy despite using weakly labeled data.
Create account to get full access
Overview
- This paper introduces NeRF-Feat, a system for 6D object pose estimation using feature rendering.
- NeRF-Feat leverages a neural radiance field (NeRF) to learn a 3D representation of an object, which is then used to estimate the object's 6D pose (3D position and 3D orientation) in a scene.
- The system utilizes feature rendering, where the NeRF is used to generate feature maps that can be matched to observed features in camera images to estimate the object's pose.
Plain English Explanation
NeRF-Feat is a new way to figure out the exact position and orientation of objects in a scene using just a camera. It works by creating a detailed 3D model of the object using a technique called a neural radiance field (NeRF). This 3D model can then be used to generate feature maps, which are like sets of unique visual characteristics that can be matched to what the camera sees. By matching these feature maps to the actual camera images, NeRF-Feat can determine the precise 6D pose (3D position and 3D orientation) of the object.
This is a powerful approach because it allows for accurate 6D pose estimation without the need for special sensors or markers on the object. The NeRF-based 3D model can capture the object's appearance from any angle, enabling robust pose estimation. This could be useful in applications like robotic manipulation, augmented reality, and autonomous navigation, where knowing the exact position and orientation of objects is crucial.
Technical Explanation
NeRF-Feat builds on recent advancements in neural radiance fields (NeRFs) [<a href="https://aimodels.fyi/papers/arxiv/novel-view-synthesis-neural-radiance-fields-industrial">1</a>, <a href="https://aimodels.fyi/papers/arxiv/leveraging-neural-radiance-fields-pose-estimation-unknown">2</a>, <a href="https://aimodels.fyi/papers/arxiv/nvins-robust-visual-inertial-navigation-fused-nerf">3</a>], which can represent the 3D appearance of an object or scene using a neural network. The authors extend this concept to enable 6D object pose estimation.
The key idea is to use the NeRF to generate feature maps, which are 2D representations of the object's visual features from different viewpoints. These feature maps can then be matched to the features observed in camera images to estimate the object's 6D pose. The authors propose a novel architecture that combines the NeRF with a feature extraction module and a pose estimation module to enable this feature-based pose estimation approach.
The authors evaluate NeRF-Feat on several benchmark datasets and show that it outperforms state-of-the-art methods for 6D object pose estimation, particularly in challenging scenarios with occlusions or clutter. The system is also shown to be robust to changes in the object's appearance, such as those caused by lighting or viewpoint variations.
Critical Analysis
The NeRF-Feat paper presents a promising approach for 6D object pose estimation, leveraging the powerful 3D representation capabilities of neural radiance fields. The feature-based approach is an interesting innovation that could enable more robust and accurate pose estimation compared to traditional methods.
However, the paper does not fully address the computational and memory requirements of the NeRF-based system, which can be significant. Additionally, the training process for the NeRF model may be time-consuming and require careful tuning, which could limit the practical applicability of the method.
The authors also acknowledge that NeRF-Feat may struggle in scenarios with significant occlusions or complex object shapes, where the NeRF-based 3D representation may not be able to fully capture the object's appearance. Further research could explore ways to address these limitations, such as incorporating additional cues or leveraging multiview information.
Overall, the NeRF-Feat paper represents an exciting step forward in the field of 6D object pose estimation, and the authors' feature-based approach is a valuable contribution. As the research in neural radiance fields continues to evolve, it will be interesting to see how NeRF-Feat and similar methods can be further refined and applied to real-world applications.
Conclusion
The NeRF-Feat system presents a novel approach to 6D object pose estimation that leverages the powerful 3D representation capabilities of neural radiance fields. By generating feature maps from the NeRF and matching them to observed camera images, NeRF-Feat can accurately estimate an object's position and orientation without the need for special sensors or markers.
This technique could have significant implications for applications like robotic manipulation, augmented reality, and autonomous navigation, where precise knowledge of an object's 6D pose is crucial. While the method has some limitations, such as computational requirements and sensitivity to occlusions, the authors' feature-based approach represents an important step forward in the field of 6D pose estimation.
As the research in neural radiance fields continues to evolve, NeRF-Feat and similar techniques may become increasingly practical and widely adopted, enabling more sophisticated and adaptive robotic systems, more immersive augmented reality experiences, and safer autonomous vehicles.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Generative Lifting of Multiview to 3D from Unknown Pose: Wrapping NeRF inside Diffusion
Xin Yuan, Rana Hanocka, Michael Maire
0
0
We cast multiview reconstruction from unknown pose as a generative modeling problem. From a collection of unannotated 2D images of a scene, our approach simultaneously learns both a network to predict camera pose from 2D image input, as well as the parameters of a Neural Radiance Field (NeRF) for the 3D scene. To drive learning, we wrap both the pose prediction network and NeRF inside a Denoising Diffusion Probabilistic Model (DDPM) and train the system via the standard denoising objective. Our framework requires the system accomplish the task of denoising an input 2D image by predicting its pose and rendering the NeRF from that pose. Learning to denoise thus forces the system to concurrently learn the underlying 3D NeRF representation and a mapping from images to camera extrinsic parameters. To facilitate the latter, we design a custom network architecture to represent pose as a distribution, granting implicit capacity for discovering view correspondences when trained end-to-end for denoising alone. This technique allows our system to successfully build NeRFs, without pose knowledge, for challenging scenes where competing methods fail. At the conclusion of training, our learned NeRF can be extracted and used as a 3D scene model; our full system can be used to sample novel camera poses and generate novel-view images.
6/12/2024
🧠
Leveraging Neural Radiance Fields for Pose Estimation of an Unknown Space Object during Proximity Operations
Antoine Legrand, Renaud Detry, Christophe De Vleeschouwer
0
0
We address the estimation of the 6D pose of an unknown target spacecraft relative to a monocular camera, a key step towards the autonomous rendezvous and proximity operations required by future Active Debris Removal missions. We present a novel method that enables an off-the-shelf spacecraft pose estimator, which is supposed to known the target CAD model, to be applied on an unknown target. Our method relies on an in-the wild NeRF, i.e., a Neural Radiance Field that employs learnable appearance embeddings to represent varying illumination conditions found in natural scenes. We train the NeRF model using a sparse collection of images that depict the target, and in turn generate a large dataset that is diverse both in terms of viewpoint and illumination. This dataset is then used to train the pose estimation network. We validate our method on the Hardware-In-the-Loop images of SPEED+ that emulate lighting conditions close to those encountered on orbit. We demonstrate that our method successfully enables the training of an off-the-shelf spacecraft pose estimation network from a sparse set of images. Furthermore, we show that a network trained using our method performs similarly to a model trained on synthetic images generated using the CAD model of the target.
6/12/2024
NVINS: Robust Visual Inertial Navigation Fused with NeRF-augmented Camera Pose Regressor and Uncertainty Quantification
Juyeop Han, Lukas Lao Beyer, Guilherme V. Cavalheiro, Sertac Karaman
0
0
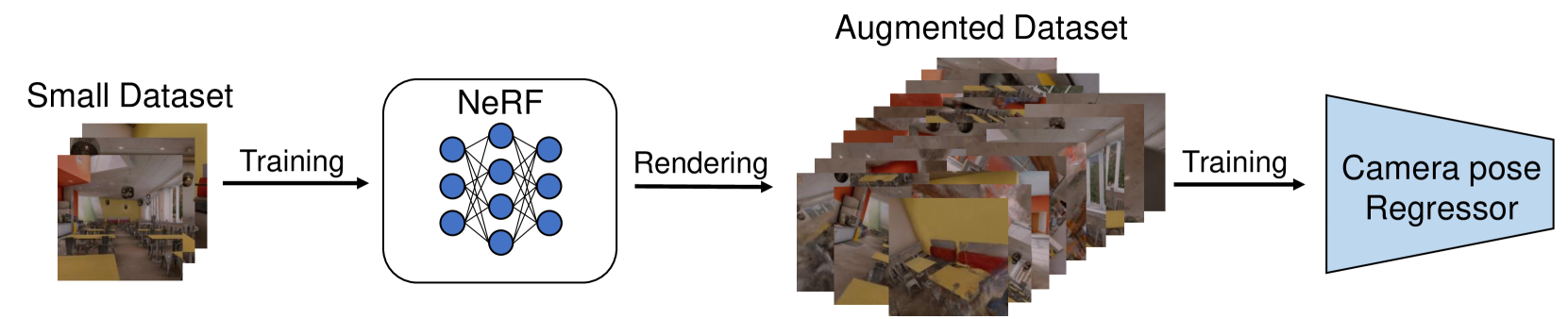
In recent years, Neural Radiance Fields (NeRF) have emerged as a powerful tool for 3D reconstruction and novel view synthesis. However, the computational cost of NeRF rendering and degradation in quality due to the presence of artifacts pose significant challenges for its application in real-time and robust robotic tasks, especially on embedded systems. This paper introduces a novel framework that integrates NeRF-derived localization information with Visual-Inertial Odometry(VIO) to provide a robust solution for robotic navigation in a real-time. By training an absolute pose regression network with augmented image data rendered from a NeRF and quantifying its uncertainty, our approach effectively counters positional drift and enhances system reliability. We also establish a mathematically sound foundation for combining visual inertial navigation with camera localization neural networks, considering uncertainty under a Bayesian framework. Experimental validation in the photorealistic simulation environment demonstrates significant improvements in accuracy compared to a conventional VIO approach.
4/3/2024
🧠
Novel View Synthesis with Neural Radiance Fields for Industrial Robot Applications
Markus Hillemann, Robert Langendorfer, Max Heiken, Max Mehltretter, Andreas Schenk, Martin Weinmann, Stefan Hinz, Christian Heipke, Markus Ulrich
0
0
Neural Radiance Fields (NeRFs) have become a rapidly growing research field with the potential to revolutionize typical photogrammetric workflows, such as those used for 3D scene reconstruction. As input, NeRFs require multi-view images with corresponding camera poses as well as the interior orientation. In the typical NeRF workflow, the camera poses and the interior orientation are estimated in advance with Structure from Motion (SfM). But the quality of the resulting novel views, which depends on different parameters such as the number and distribution of available images, as well as the accuracy of the related camera poses and interior orientation, is difficult to predict. In addition, SfM is a time-consuming pre-processing step, and its quality strongly depends on the image content. Furthermore, the undefined scaling factor of SfM hinders subsequent steps in which metric information is required. In this paper, we evaluate the potential of NeRFs for industrial robot applications. We propose an alternative to SfM pre-processing: we capture the input images with a calibrated camera that is attached to the end effector of an industrial robot and determine accurate camera poses with metric scale based on the robot kinematics. We then investigate the quality of the novel views by comparing them to ground truth, and by computing an internal quality measure based on ensemble methods. For evaluation purposes, we acquire multiple datasets that pose challenges for reconstruction typical of industrial applications, like reflective objects, poor texture, and fine structures. We show that the robot-based pose determination reaches similar accuracy as SfM in non-demanding cases, while having clear advantages in more challenging scenarios. Finally, we present first results of applying the ensemble method to estimate the quality of the synthetic novel view in the absence of a ground truth.
5/8/2024