Neural Fluidic System Design and Control with Differentiable Simulation
2405.14903
0
0
🧠
Abstract
We present a novel framework to explore neural control and design of complex fluidic systems with dynamic solid boundaries. Our system features a fast differentiable Navier-Stokes solver with solid-fluid interface handling, a low-dimensional differentiable parametric geometry representation, a control-shape co-design algorithm, and gym-like simulation environments to facilitate various fluidic control design applications. Additionally, we present a benchmark of design, control, and learning tasks on high-fidelity, high-resolution dynamic fluid environments that pose challenges for existing differentiable fluid simulators. These tasks include designing the control of artificial hearts, identifying robotic end-effector shapes, and controlling a fluid gate. By seamlessly incorporating our differentiable fluid simulator into a learning framework, we demonstrate successful design, control, and learning results that surpass gradient-free solutions in these benchmark tasks.
Create account to get full access
Overview
- Presents a novel framework for exploring neural control and design of complex fluidic systems with dynamic solid boundaries
- Features a fast differentiable Navier-Stokes solver, a low-dimensional differentiable parametric geometry representation, a control-shape co-design algorithm, and simulation environments for various fluidic control design applications
- Includes a benchmark of design, control, and learning tasks on high-fidelity, high-resolution dynamic fluid environments
Plain English Explanation
The paper introduces a new system that makes it easier to design and control complex fluid-based systems, such as those used in artificial hearts or robotic manipulators. At the core of this system is a fast, differentiable fluid simulator that can model how fluids interact with solid boundaries. This simulator is paired with a way to easily adjust the shape of those solid boundaries, and an algorithm that can co-optimize the design of the shape and the control of the fluid flow.
The researchers also created a set of simulation environments, similar to the "gym" environments used in reinforcement learning, that can be used to test different fluid control and design challenges. These include tasks like designing the control of an artificial heart, identifying the best shape for a robotic end-effector, and controlling the flow of fluid through a gate.
By combining the differentiable fluid simulator with machine learning techniques, the researchers were able to solve these benchmark tasks more effectively than approaches that don't use gradients, like evolutionary algorithms.
Technical Explanation
The core of the framework is a fast, differentiable Navier-Stokes solver that can handle solid-fluid interfaces. This means the simulator can accurately model how fluids interact with and are affected by solid boundaries, which is important for many real-world fluidic systems. The researchers also developed a low-dimensional, differentiable parametric representation of the geometry, allowing the shape of solid boundaries to be easily adjusted.
These two key components - the differentiable fluid simulator and the differentiable geometry representation - are integrated into a control-shape co-design algorithm. This algorithm can jointly optimize the control of the fluid flow and the design of the solid boundaries, enabling the exploration of complex fluidic systems.
To facilitate research and development in this area, the team created a set of gym-like simulation environments that pose various design, control, and learning challenges for fluidic systems. These include tasks like designing the control of an artificial heart, identifying the optimal shape of a robotic end-effector, and controlling the flow of fluid through a gate.
By seamlessly incorporating the differentiable fluid simulator into a learning framework, the researchers were able to demonstrate successful results on these benchmark tasks that outperform gradient-free optimization approaches, such as evolutionary algorithms and inverse analysis of granular flows.
Critical Analysis
The paper presents a promising framework for exploring the design and control of complex fluidic systems, but there are a few potential limitations and areas for further research:
-
The benchmark tasks, while challenging, may not fully capture the complexity of real-world fluidic systems, which can involve additional physical phenomena, such as turbulence, heat transfer, or multiphase flows.
-
The differentiable fluid simulator, while fast, may still be too computationally expensive for some real-time control applications, particularly for large-scale systems. Further improvements in efficiency or approximations may be needed.
-
The co-design algorithm relies on the availability of accurate models and gradients, which may be difficult to obtain in practice, especially for complex fluidic systems with significant uncertainties.
-
The potential for the framework to be applied to a wide range of fluidic systems, beyond the specific benchmark tasks, is not fully demonstrated in the paper. More diverse case studies would help validate the generalizability of the approach.
Overall, the presented framework represents an important step forward in the field of neural control and concurrent system identification and control learning for fluidic systems, and the benchmark tasks provide a valuable resource for further research and development in this area.
Conclusion
This paper introduces a novel framework for exploring the neural control and design of complex fluidic systems with dynamic solid boundaries. The key components of the framework include a fast, differentiable Navier-Stokes solver, a low-dimensional differentiable parametric geometry representation, and a control-shape co-design algorithm. The researchers also created a set of gym-like simulation environments to facilitate various fluidic control design applications.
By seamlessly integrating the differentiable fluid simulator into a learning framework, the researchers were able to demonstrate successful results on benchmark tasks involving the design of artificial hearts, the identification of robotic end-effector shapes, and the control of fluid flow through a gate. These results outperform gradient-free optimization approaches, showcasing the potential of this framework for learning to move objects with fluid streams and other fluidic control applications.
While the framework presents some promising advances, there are also potential limitations and areas for further research, such as expanding the range of physical phenomena captured, improving computational efficiency, and validating the framework's generalizability to a wider range of fluidic systems. Overall, this work represents an important contribution to the field of differentiable fluid simulation and control, with numerous implications for the design and optimization of complex fluidic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Learning to Move Objects with Fluid Streams in a Differentiable Simulation
Karlis Freivalds, Laura Leja, Oskars Teikmanis
0
0
We introduce a method for manipulating objects in three-dimensional space using controlled fluid streams. To achieve this, we train a neural network controller in a differentiable simulation and evaluate it in a simulated environment consisting of an 8x8 grid of vertical emitters. By carrying out various horizontal displacement tasks such as moving objects to specific positions while reacting to external perturbations, we demonstrate that a controller, trained with a limited number of iterations, can generalise to longer episodes and learn the complex dynamics of fluid-solid interactions. Importantly, our approach requires only the observation of the manipulated object's state, paving the way for the development of physical systems that enable contactless manipulation of objects using air streams.
4/30/2024
🤖
Evolution and learning in differentiable robots
Luke Strgar, David Matthews, Tyler Hummer, Sam Kriegman
0
0
The automatic design of robots has existed for 30 years but has been constricted by serial non-differentiable design evaluations, premature convergence to simple bodies or clumsy behaviors, and a lack of sim2real transfer to physical machines. Thus, here we employ massively-parallel differentiable simulations to rapidly and simultaneously optimize individual neural control of behavior across a large population of candidate body plans and return a fitness score for each design based on the performance of its fully optimized behavior. Non-differentiable changes to the mechanical structure of each robot in the population -- mutations that rearrange, combine, add, or remove body parts -- were applied by a genetic algorithm in an outer loop of search, generating a continuous flow of novel morphologies with highly-coordinated and graceful behaviors honed by gradient descent. This enabled the exploration of several orders-of-magnitude more designs than all previous methods, despite the fact that robots here have the potential to be much more complex, in terms of number of independent motors, than those in prior studies. We found that evolution reliably produces ``increasingly differentiable'' robots: body plans that smooth the loss landscape in which learning operates and thereby provide better training paths toward performant behaviors. Finally, one of the highly differentiable morphologies discovered in simulation was realized as a physical robot and shown to retain its optimized behavior. This provides a cyberphysical platform to investigate the relationship between evolution and learning in biological systems and broadens our understanding of how a robot's physical structure can influence the ability to train policies for it. Videos and code at https://sites.google.com/view/eldir.
5/28/2024
🤿
New!Enhancing Computational Efficiency in Multiscale Systems Using Deep Learning of Coordinates and Flow Maps
Asif Hamid, Danish Rafiq, Shahkar Ahmad Nahvi, Mohammad Abid Bazaz
0
0
Complex systems often show macroscopic coherent behavior due to the interactions of microscopic agents like molecules, cells, or individuals in a population with their environment. However, simulating such systems poses several computational challenges during simulation as the underlying dynamics vary and span wide spatiotemporal scales of interest. To capture the fast-evolving features, finer time steps are required while ensuring that the simulation time is long enough to capture the slow-scale behavior, making the analyses computationally unmanageable. This paper showcases how deep learning techniques can be used to develop a precise time-stepping approach for multiscale systems using the joint discovery of coordinates and flow maps. While the former allows us to represent the multiscale dynamics on a representative basis, the latter enables the iterative time-stepping estimation of the reduced variables. The resulting framework achieves state-of-the-art predictive accuracy while incurring lesser computational costs. We demonstrate this ability of the proposed scheme on the large-scale Fitzhugh Nagumo neuron model and the 1D Kuramoto-Sivashinsky equation in the chaotic regime.
7/2/2024
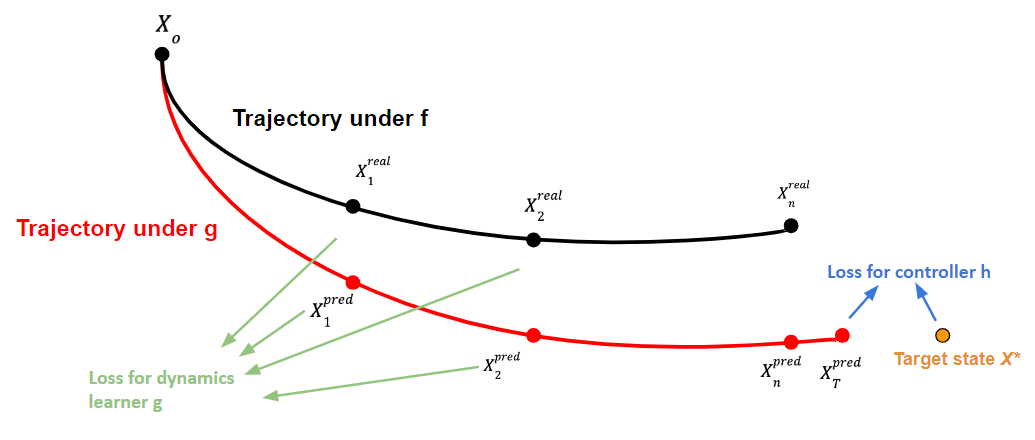
Neural Control: Concurrent System Identification and Control Learning with Neural ODE
Cheng Chi
0
0
Controlling continuous-time dynamical systems is generally a two step process: first, identify or model the system dynamics with differential equations, then, minimize the control objectives to achieve optimal control function and optimal state trajectories. However, any inaccuracy in dynamics modeling will lead to sub-optimality in the resulting control function. To address this, we propose a neural ODE based method for controlling unknown dynamical systems, denoted as Neural Control (NC), which combines dynamics identification and optimal control learning using a coupled neural ODE. Through an intriguing interplay between the two neural networks in coupled neural ODE structure, our model concurrently learns system dynamics as well as optimal controls that guides towards target states. Our experiments demonstrate the effectiveness of our model for learning optimal control of unknown dynamical systems. Codes available at https://github.com/chichengmessi/neural_ode_control/tree/main
4/23/2024