Evolution and learning in differentiable robots
2405.14712
0
0
🤖
Abstract
The automatic design of robots has existed for 30 years but has been constricted by serial non-differentiable design evaluations, premature convergence to simple bodies or clumsy behaviors, and a lack of sim2real transfer to physical machines. Thus, here we employ massively-parallel differentiable simulations to rapidly and simultaneously optimize individual neural control of behavior across a large population of candidate body plans and return a fitness score for each design based on the performance of its fully optimized behavior. Non-differentiable changes to the mechanical structure of each robot in the population -- mutations that rearrange, combine, add, or remove body parts -- were applied by a genetic algorithm in an outer loop of search, generating a continuous flow of novel morphologies with highly-coordinated and graceful behaviors honed by gradient descent. This enabled the exploration of several orders-of-magnitude more designs than all previous methods, despite the fact that robots here have the potential to be much more complex, in terms of number of independent motors, than those in prior studies. We found that evolution reliably produces ``increasingly differentiable'' robots: body plans that smooth the loss landscape in which learning operates and thereby provide better training paths toward performant behaviors. Finally, one of the highly differentiable morphologies discovered in simulation was realized as a physical robot and shown to retain its optimized behavior. This provides a cyberphysical platform to investigate the relationship between evolution and learning in biological systems and broadens our understanding of how a robot's physical structure can influence the ability to train policies for it. Videos and code at https://sites.google.com/view/eldir.
Create account to get full access
Overview
- Automated robot design has existed for 30 years, but has been limited by issues like non-differentiable design evaluations, premature convergence to simple bodies or behaviors, and lack of real-world transfer
- This paper introduces a new approach using massively-parallel differentiable simulations to rapidly optimize neural control and body plans simultaneously
- The method explores orders-of-magnitude more designs than previous approaches, and evolves body plans that are "increasingly differentiable" to enable better learning
Plain English Explanation
The researchers developed a new way to automatically design and train robots that addresses some of the key challenges in this area. For a long time, robot design has been done through trial-and-error, with the process of evaluating each new robot design being non-differentiable - meaning it's hard to use machine learning techniques to gradually improve the designs. This often led to robots converging on simple, clumsy body plans or behaviors.
To solve this, the researchers used differentiable simulations to quickly test and optimize both the robot's control policies and its physical structure at the same time. This allowed them to explore a much wider range of possible robot designs than previous methods. Interestingly, they found that the evolutionary process naturally produced robot bodies that were increasingly "differentiable" - meaning the robots had body plans that made it easier to use gradient-based learning to train their control policies.
Finally, the researchers built a physical robot based on one of the high-performing digital designs, and showed that it could retain the optimized behavior in the real world. This provides a new platform to study the relationship between physical robot structure and the ability to train effective control policies - insights that could be valuable for both robotics and our understanding of biological systems.
Technical Explanation
The core innovation in this paper is the use of massively-parallel differentiable simulations to jointly optimize a population of robot body plans and their corresponding neural control policies. Previous approaches to automated robot design have been limited by the fact that evaluating the performance of a given design was a non-differentiable process, making it difficult to use gradient-based optimization techniques.
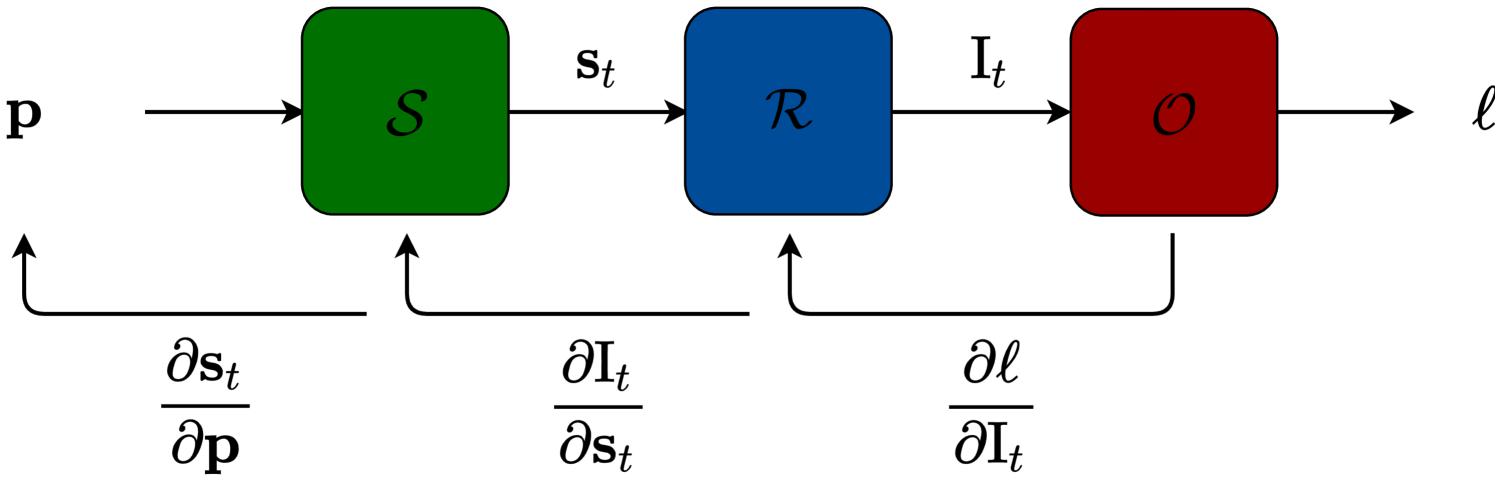
To address this, the researchers employed a genetic algorithm in an outer loop to mutate and combine the mechanical structure of robots, while using gradient descent in an inner loop to train the control policies for each candidate design. This allowed them to efficiently explore a much larger space of robot morphologies than previous methods, despite the potentially high complexity of the robots in terms of independent motors.
Interestingly, the researchers found that the evolutionary process tended to produce robot body plans that were increasingly "differentiable" - meaning the loss landscape that the control policy training operates in became smoother and easier to optimize. This is a significant insight, as it suggests that the physical structure of a robot can profoundly impact the trainability of its control policies.
To validate their approach, the researchers built a physical robot based on one of the high-performing digital designs discovered through their method. They showed that this real-world robot was able to retain the optimized behavior learned in simulation, providing a new cyberphysical platform to investigate the relationship between evolution and learning.
Critical Analysis
The researchers acknowledge several limitations and areas for future work in their paper. For example, while they were able to explore a much broader design space than previous methods, their robots were still relatively simple compared to the complexity of biological organisms. Additionally, the sim-to-real transfer demonstrated with the physical robot prototype was relatively limited in scope.
One potential concern is the computational cost of the massively-parallel differentiable simulations, which may restrict the scalability of this approach. The researchers note that advances in CUDA-accelerated soft robot evolution and differentiable physics simulators could help address this, but it remains an important consideration.
Additionally, while the researchers highlight the potential for their approach to enable the creation of novel soft robot designs, the paper itself does not focus on soft robotics. Expanding the method to handle the challenges of soft and deformable materials could be a valuable direction for future research.
Overall, this paper represents an important step forward in the automatic design of robots, with promising implications for both robotics and our understanding of biological systems. However, as with any cutting-edge research, there are still significant challenges and open questions to be addressed in future work.
Conclusion
This paper introduces a novel approach to the automatic design of robots that uses massively-parallel differentiable simulations to jointly optimize the morphology and control policies of a population of candidate designs. By enabling the exploration of a much broader design space and the discovery of "increasingly differentiable" robot body plans, this method addresses several longstanding challenges in this area.
The ability to rapidly generate and test a wide variety of robot configurations, combined with the insights into the relationship between physical structure and trainability, could have far-reaching implications. This work not only advances the state-of-the-art in robot design, but also provides a new cyberphysical platform to investigate the principles underlying biological systems and the evolution of complex forms.
As the researchers continue to refine and expand this approach, it will be exciting to see how it enables the creation of increasingly capable and adaptable robots, and how these insights shape our understanding of the interplay between form and function in both artificial and natural systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🛸
DiffGen: Robot Demonstration Generation via Differentiable Physics Simulation, Differentiable Rendering, and Vision-Language Model
Yang Jin, Jun Lv, Shuqiang Jiang, Cewu Lu
0
0
Generating robot demonstrations through simulation is widely recognized as an effective way to scale up robot data. Previous work often trained reinforcement learning agents to generate expert policies, but this approach lacks sample efficiency. Recently, a line of work has attempted to generate robot demonstrations via differentiable simulation, which is promising but heavily relies on reward design, a labor-intensive process. In this paper, we propose DiffGen, a novel framework that integrates differentiable physics simulation, differentiable rendering, and a vision-language model to enable automatic and efficient generation of robot demonstrations. Given a simulated robot manipulation scenario and a natural language instruction, DiffGen can generate realistic robot demonstrations by minimizing the distance between the embedding of the language instruction and the embedding of the simulated observation after manipulation. The embeddings are obtained from the vision-language model, and the optimization is achieved by calculating and descending gradients through the differentiable simulation, differentiable rendering, and vision-language model components, thereby accomplishing the specified task. Experiments demonstrate that with DiffGen, we could efficiently and effectively generate robot data with minimal human effort or training time.
5/14/2024
Differentiable Rendering as a Way to Program Cable-Driven Soft Robots
Kasra Arnavaz, Kenny Erleben
0
0
Soft robots have gained increased popularity in recent years due to their adaptability and compliance. In this paper, we use a digital twin model of cable-driven soft robots to learn control parameters in simulation. In doing so, we take advantage of differentiable rendering as a way to instruct robots to complete tasks such as point reach, gripping an object, and obstacle avoidance. This approach simplifies the mathematical description of such complicated tasks and removes the need for landmark points and their tracking. Our experiments demonstrate the applicability of our method.
4/12/2024
🧠
CUDA-Accelerated Soft Robot Neural Evolution with Large Language Model Supervision
Lechen Zhang
0
0
This paper addresses the challenge of co-designing morphology and control in soft robots via a novel neural network evolution approach. We propose an innovative method to implicitly dual-encode soft robots, thus facilitating the simultaneous design of morphology and control. Additionally, we introduce the large language model to serve as the control center during the evolutionary process. This advancement considerably optimizes the evolution speed compared to traditional soft-bodied robot co-design methods. Further complementing our work is the implementation of Gaussian positional encoding - an approach that augments the neural network's comprehension of robot morphology. Our paper offers a new perspective on soft robot design, illustrating substantial improvements in efficiency and comprehension during the design and evolutionary process.
5/3/2024
🤖
Creation of Novel Soft Robot Designs using Generative AI
Wee Kiat Chan, PengWei Wang, Raye Chen-Hua Yeow
0
0
Soft robotics has emerged as a promising field with the potential to revolutionize industries such as healthcare and manufacturing. However, designing effective soft robots presents challenges, particularly in managing the complex interplay of material properties, structural design, and control strategies. Traditional design methods are often time-consuming and may not yield optimal designs. In this paper, we explore the use of generative AI to create 3D models of soft actuators. We create a dataset of over 70 text-shape pairings of soft pneumatic robot actuator designs, and adapt a latent diffusion model (SDFusion) to learn the data distribution and generate novel designs from it. By employing transfer learning and data augmentation techniques, we significantly improve the performance of the diffusion model. These findings highlight the potential of generative AI in designing complex soft robotic systems, paving the way for future advancements in the field.
5/6/2024