Neural Surface Reconstruction and Rendering for LiDAR-Visual Systems

0
Sign in to get full access
Overview
- This paper presents a neural surface reconstruction and rendering approach for LiDAR-visual systems.
- The method combines LiDAR point clouds and camera images to generate high-quality 3D reconstructions of indoor and outdoor scenes.
- The approach leverages deep learning to learn an implicit surface representation from the input data, enabling efficient rendering and downstream applications.
Plain English Explanation
The researchers developed a new way to create 3D models of real-world environments using data from two common sensor types - LiDAR (which measures distance using lasers) and cameras. By combining the information from these sensors, they were able to produce detailed, realistic 3D reconstructions that can be efficiently rendered and used for various applications.
The key innovation is that their method learns an implicit representation of the 3D surface rather than explicitly storing geometric details. This implicit representation allows the 3D model to be stored compactly and rendered quickly, without sacrificing visual quality.
The researchers demonstrated their approach on both indoor and outdoor scenes, showing that it can handle a variety of environments and produce high-fidelity results. This type of efficient 3D reconstruction could be useful for applications like virtual reality, autonomous navigation, and 3D mapping.
Technical Explanation
The core of the method is a neural network that learns to map the LiDAR point cloud and camera images to an implicit representation of the 3D surface. This implicit representation is encoded as a continuous function that can be efficiently evaluated to generate the surface geometry and appearance.
The network architecture consists of several components:
- A LiDAR encoder that processes the point cloud data
- An image encoder that processes the camera images
- A fusion module that combines the encoded features from the LiDAR and image data
- A decoder that generates the implicit surface representation
The training process optimizes this network to minimize the distance between the reconstructed surface and the ground truth, using a combination of LiDAR and image supervision. The resulting implicit surface can then be rendered efficiently using techniques like ray marching.
Critical Analysis
The paper demonstrates promising results, but also acknowledges several limitations and areas for future work. One key limitation is that the method requires registered LiDAR and camera data, which may not always be available. Additionally, the implicit surface representation, while efficient, may struggle to capture fine geometric details compared to explicit mesh-based reconstructions.
Further research could explore ways to relax the registration requirement, potentially by learning the alignment from the data itself. Improving the fidelity of the implicit surface representation, perhaps by incorporating additional supervision signals or architectural innovations, is another promising direction.
Overall, this work represents an interesting step forward in the field of 3D reconstruction, leveraging the complementary strengths of LiDAR and vision sensors to produce high-quality, efficient 3D models of real-world environments.
Conclusion
This paper presents a neural surface reconstruction approach that combines LiDAR point clouds and camera images to generate detailed 3D models of indoor and outdoor scenes. By learning an implicit surface representation, the method enables efficient rendering and downstream applications.
The technical innovations, promising results, and identified areas for future work make this a valuable contribution to the field of 3D reconstruction. As sensor technologies and machine learning continue to advance, techniques like this could play an increasingly important role in a wide range of applications, from virtual reality to autonomous navigation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Neural Surface Reconstruction and Rendering for LiDAR-Visual Systems
Jianheng Liu, Chunran Zheng, Yunfei Wan, Bowen Wang, Yixi Cai, Fu Zhang
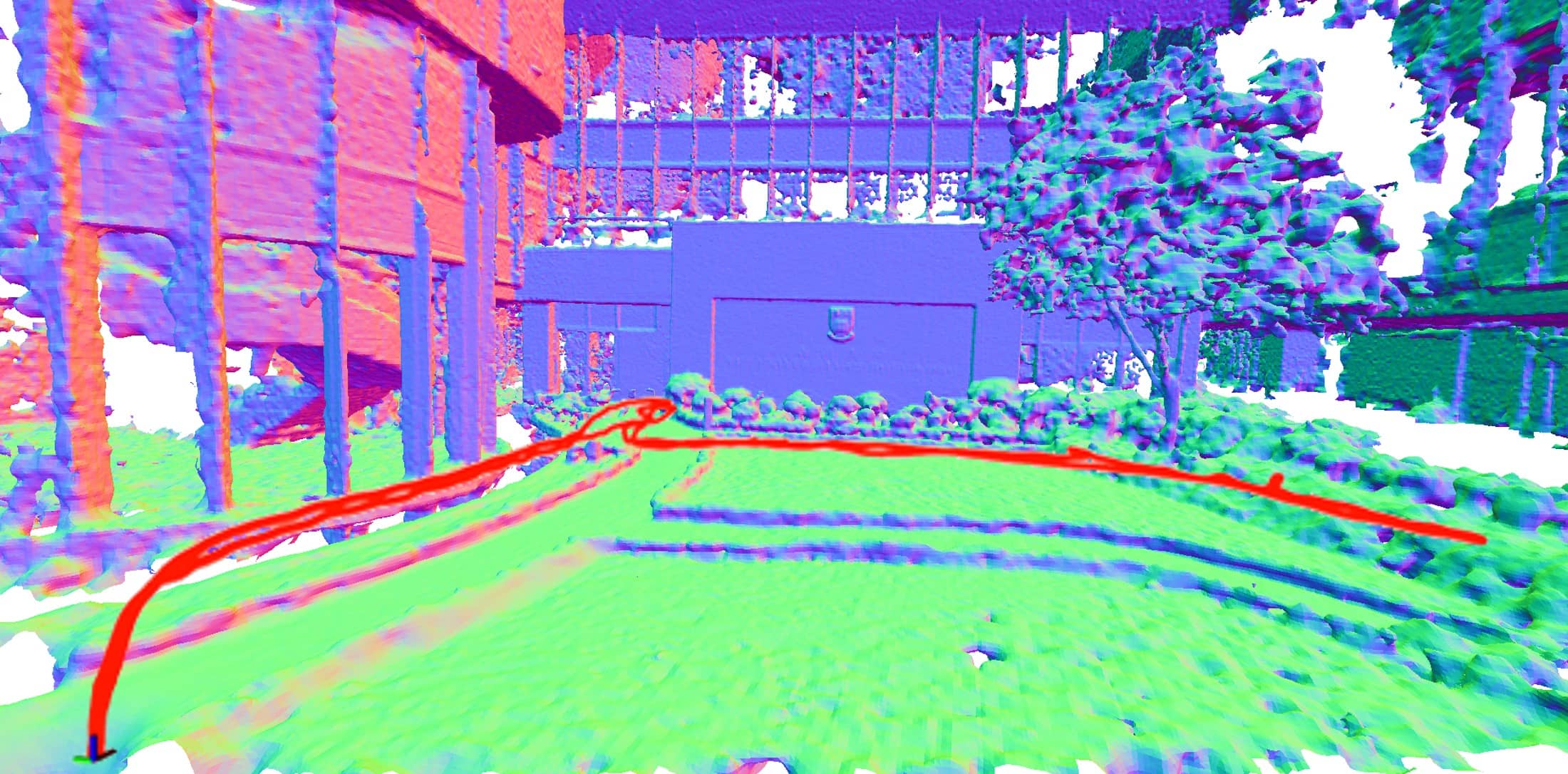
This paper presents a unified surface reconstruction and rendering framework for LiDAR-visual systems, integrating Neural Radiance Fields (NeRF) and Neural Distance Fields (NDF) to recover both appearance and structural information from posed images and point clouds. We address the structural visible gap between NeRF and NDF by utilizing a visible-aware occupancy map to classify space into the free, occupied, visible unknown, and background regions. This classification facilitates the recovery of a complete appearance and structure of the scene. We unify the training of the NDF and NeRF using a spatial-varying scale SDF-to-density transformation for levels of detail for both structure and appearance. The proposed method leverages the learned NDF for structure-aware NeRF training by an adaptive sphere tracing sampling strategy for accurate structure rendering. In return, NeRF further refines structural in recovering missing or fuzzy structures in the NDF. Extensive experiments demonstrate the superior quality and versatility of the proposed method across various scenarios. To benefit the community, the codes will be released at url{https://github.com/hku-mars/M2Mapping}.
Read more9/10/2024
👨🏫
0
Depth Supervised Neural Surface Reconstruction from Airborne Imagery
Vincent Hackstein, Paul Fauth-Mayer, Matthias Rothermel, Norbert Haala
While originally developed for novel view synthesis, Neural Radiance Fields (NeRFs) have recently emerged as an alternative to multi-view stereo (MVS). Triggered by a manifold of research activities, promising results have been gained especially for texture-less, transparent, and reflecting surfaces, while such scenarios remain challenging for traditional MVS-based approaches. However, most of these investigations focus on close-range scenarios, with studies for airborne scenarios still missing. For this task, NeRFs face potential difficulties at areas of low image redundancy and weak data evidence, as often found in street canyons, facades or building shadows. Furthermore, training such networks is computationally expensive. Thus, the aim of our work is twofold: First, we investigate the applicability of NeRFs for aerial image blocks representing different characteristics like nadir-only, oblique and high-resolution imagery. Second, during these investigations we demonstrate the benefit of integrating depth priors from tie-point measures, which are provided during presupposed Bundle Block Adjustment. Our work is based on the state-of-the-art framework VolSDF, which models 3D scenes by signed distance functions (SDFs), since this is more applicable for surface reconstruction compared to the standard volumetric representation in vanilla NeRFs. For evaluation, the NeRF-based reconstructions are compared to results of a publicly available benchmark dataset for airborne images.
Read more4/26/2024

0
A Comparative Study of Neural Surface Reconstruction for Scientific Visualization
Siyuan Yao, Weixi Song, Chaoli Wang
This comparative study evaluates various neural surface reconstruction methods, particularly focusing on their implications for scientific visualization through reconstructing 3D surfaces via multi-view rendering images. We categorize ten methods into neural radiance fields and neural implicit surfaces, uncovering the benefits of leveraging distance functions (i.e., SDFs and UDFs) to enhance the accuracy and smoothness of the reconstructed surfaces. Our findings highlight the efficiency and quality of NeuS2 for reconstructing closed surfaces and identify NeUDF as a promising candidate for reconstructing open surfaces despite some limitations. By sharing our benchmark dataset, we invite researchers to test the performance of their methods, contributing to the advancement of surface reconstruction solutions for scientific visualization.
Read more7/31/2024

0
DiL-NeRF: Delving into Lidar for Neural Radiance Field on Street Scenes
Shanlin Sun, Bingbing Zhuang, Ziyu Jiang, Buyu Liu, Xiaohui Xie, Manmohan Chandraker
Photorealistic simulation plays a crucial role in applications such as autonomous driving, where advances in neural radiance fields (NeRFs) may allow better scalability through the automatic creation of digital 3D assets. However, reconstruction quality suffers on street scenes due to largely collinear camera motions and sparser samplings at higher speeds. On the other hand, the application often demands rendering from camera views that deviate from the inputs to accurately simulate behaviors like lane changes. In this paper, we propose several insights that allow a better utilization of Lidar data to improve NeRF quality on street scenes. First, our framework learns a geometric scene representation from Lidar, which is fused with the implicit grid-based representation for radiance decoding, thereby supplying stronger geometric information offered by explicit point cloud. Second, we put forth a robust occlusion-aware depth supervision scheme, which allows utilizing densified Lidar points by accumulation. Third, we generate augmented training views from Lidar points for further improvement. Our insights translate to largely improved novel view synthesis under real driving scenes.
Read more5/7/2024