NeuroKoopman Dynamic Causal Discovery

0

Sign in to get full access
Overview
- This paper presents "NeuroKoopman Dynamic Causal Discovery", a method for analyzing causal relationships in complex nonlinear time series data.
- The approach combines Granger causality and the Koopman operator, a technique for modeling nonlinear dynamical systems.
- The authors apply this method to study causal interactions in neural activity recorded from the brain.
Plain English Explanation
The paper introduces a new way to study how different parts of the brain influence each other over time. Traditional methods for analyzing causal relationships, like Granger causality, can struggle with complex, nonlinear data like brain activity. The researchers' approach, called "NeuroKoopman Dynamic Causal Discovery", combines Granger causality with the Koopman operator - a mathematical tool for modeling nonlinear dynamical systems.
This allows the method to uncover causal influences in brain activity data that might be missed by simpler techniques. For example, it could help researchers understand how activity in one brain region leads to changes in another region over time, even if the relationship is nonlinear. By applying this approach to neural data, the authors aim to gain new insights into how different parts of the brain interact and influence each other during various cognitive tasks or behaviors.
Technical Explanation
The key innovation of this paper is the integration of Granger causality and the Koopman operator for analyzing causal relationships in nonlinear time series data. Granger causality is a widely used statistical technique for inferring causal influences between time series. However, it relies on linear models and can struggle with complex, nonlinear dynamics.
The authors address this by embedding the time series data in a high-dimensional Koopman operator framework. The Koopman operator is a linear operator that can approximate nonlinear dynamics by projecting the system onto an infinite-dimensional space. By combining Granger causality with this Koopman representation, the "NeuroKoopman" method can discover causal influences in nonlinear systems like the brain.
The paper demonstrates this approach on simulated data as well as neural activity recordings from the primary motor cortex of macaque monkeys performing a reaching task. The results show that NeuroKoopman can uncover causal interactions that are missed by standard Granger causality analysis.
Critical Analysis
A key strength of the NeuroKoopman method is its ability to handle nonlinear dynamics, which is crucial for understanding complex biological systems like the brain. The authors provide a thorough theoretical foundation and demonstrate the approach on both synthetic and real-world neural data.
However, a potential limitation is the computational complexity of the Koopman operator representation, which may limit the scalability of the method to very high-dimensional time series. Additionally, the paper does not address the interpretability of the discovered causal relationships - an important consideration for neuroscience applications.
Further research could explore ways to improve the efficiency and interpretability of the NeuroKoopman approach, as well as applying it to a wider range of complex dynamical systems beyond neuroscience.
Conclusion
This paper presents a novel method, NeuroKoopman Dynamic Causal Discovery, that combines Granger causality and the Koopman operator to uncover causal relationships in nonlinear time series data. The authors demonstrate its effectiveness on simulated data and real-world neural activity recordings, showing its potential to provide new insights into the complex dynamics of the brain. While the approach has some limitations, it represents an important step forward in the analysis of causal interactions in nonlinear systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
NeuroKoopman Dynamic Causal Discovery
Rahmat Adesunkanmi, Balaji Sesha Srikanth Pokuri, Ratnesh Kumar
In many real-world applications where the system dynamics has an underlying interdependency among its variables (such as power grid, economics, neuroscience, omics networks, environmental ecosystems, and others), one is often interested in knowing whether the past values of one time series influences the future of another, known as Granger causality, and the associated underlying dynamics. This paper introduces a Koopman-inspired framework that leverages neural networks for data-driven learning of the Koopman bases, termed NeuroKoopman Dynamic Causal Discovery (NKDCD), for reliably inferring the Granger causality along with the underlying nonlinear dynamics. NKDCD employs an autoencoder architecture that lifts the nonlinear dynamics to a higher dimension using data-learned bases, where the lifted time series can be reliably modeled linearly. The lifting function, the linear Granger causality lag matrices, and the projection function (from lifted space to base space) are all represented as multilayer perceptrons and are all learned simultaneously in one go. NKDCD also utilizes sparsity-inducing penalties on the weights of the lag matrices, encouraging the model to select only the needed causal dependencies within the data. Through extensive testing on practically applicable datasets, it is shown that the NKDCD outperforms the existing nonlinear Granger causality discovery approaches.
Read more4/26/2024
🧠
0
Granger Causality using Neural Networks
Malik Shahid Sultan, Samuel Horvath, Hernando Ombao
Dependence between nodes in a network is an important concept that pervades many areas including finance, politics, sociology, genomics and the brain sciences. One way to characterize dependence between components of a multivariate time series data is via Granger Causality (GC). Standard traditional approaches to GC estimation / inference commonly assume linear dynamics, however such simplification does not hold in many real-world applications where signals are inherently non-linear. In such cases, imposing linear models such as vector autoregressive (VAR) models can lead to mis-characterization of true Granger Causal interactions. To overcome this limitation, Tank et al (IEEE Transactions on Pattern Analysis and Machine Learning, 2022) proposed a solution that uses neural networks with sparse regularization penalties. The regularization encourages learnable weights to be sparse, which enables inference on GC. This paper overcomes the limitations of current methods by leveraging advances in machine learning and deep learning which have been demonstrated to learn hidden patterns in the data. We propose novel classes of models that can handle underlying non-linearity in a computationally efficient manner, simultaneously providing GC and lag order selection. Firstly, we present the Learned Kernel VAR (LeKVAR) model that learns kernel parameterized by a shared neural net followed by penalization on learnable weights to discover GC structure. Secondly, we show one can directly decouple lags and individual time series importance via decoupled penalties. This is important as we want to select the lag order during the process of GC estimation. This decoupling acts as a filtering and can be extended to any DL model including Multi-Layer Perceptrons (MLP), Recurrent Neural Networks (RNN), Long Short Term Memory Networks (LSTM), Transformers etc, for simultaneous GC estimation and lag selection.
Read more8/9/2024
🧠
0
Neural Koopman prior for data assimilation
Anthony Frion, Lucas Drumetz, Mauro Dalla Mura, Guillaume Tochon, Abdeldjalil Aissa El Bey
With the increasing availability of large scale datasets, computational power and tools like automatic differentiation and expressive neural network architectures, sequential data are now often treated in a data-driven way, with a dynamical model trained from the observation data. While neural networks are often seen as uninterpretable black-box architectures, they can still benefit from physical priors on the data and from mathematical knowledge. In this paper, we use a neural network architecture which leverages the long-known Koopman operator theory to embed dynamical systems in latent spaces where their dynamics can be described linearly, enabling a number of appealing features. We introduce methods that enable to train such a model for long-term continuous reconstruction, even in difficult contexts where the data comes in irregularly-sampled time series. The potential for self-supervised learning is also demonstrated, as we show the promising use of trained dynamical models as priors for variational data assimilation techniques, with applications to e.g. time series interpolation and forecasting.
Read more6/26/2024
0
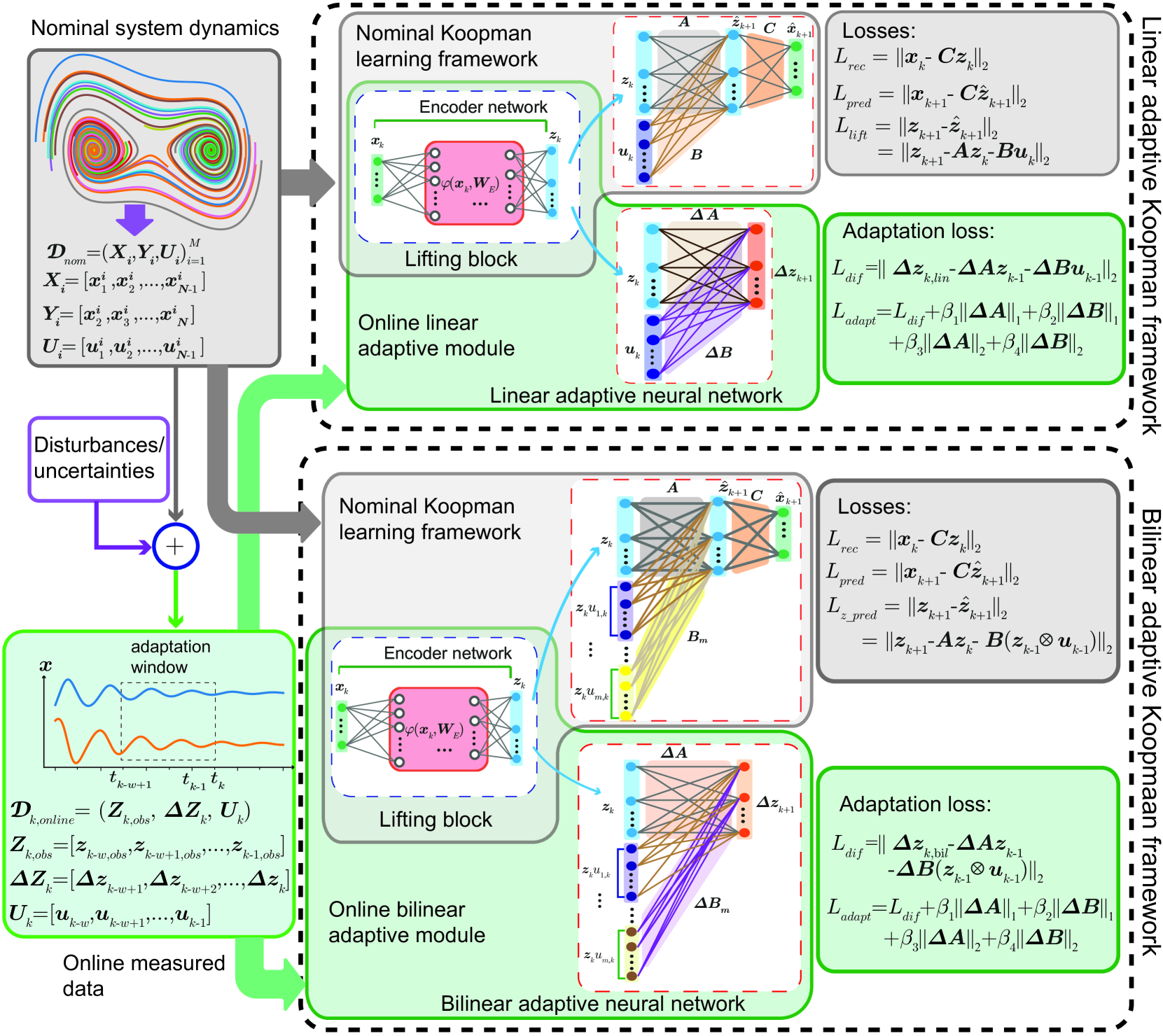
Adaptive Koopman Embedding for Robust Control of Complex Dynamical Systems
Rajpal Singh, Chandan Kumar Sah, Jishnu Keshavan
The discovery of linear embedding is the key to the synthesis of linear control techniques for nonlinear systems. In recent years, while Koopman operator theory has become a prominent approach for learning these linear embeddings through data-driven methods, these algorithms often exhibit limitations in generalizability beyond the distribution captured by training data and are not robust to changes in the nominal system dynamics induced by intrinsic or environmental factors. To overcome these limitations, this study presents an adaptive Koopman architecture capable of responding to the changes in system dynamics online. The proposed framework initially employs an autoencoder-based neural network that utilizes input-output information from the nominal system to learn the corresponding Koopman embedding offline. Subsequently, we augment this nominal Koopman architecture with a feed-forward neural network that learns to modify the nominal dynamics in response to any deviation between the predicted and observed lifted states, leading to improved generalization and robustness to a wide range of uncertainties and disturbances compared to contemporary methods. Extensive tracking control simulations, which are undertaken by integrating the proposed scheme within a Model Predictive Control framework, are used to highlight its robustness against measurement noise, disturbances, and parametric variations in system dynamics.
Read more5/21/2024