Neuromorphic Drone Detection: an Event-RGB Multimodal Approach

0
Sign in to get full access
Overview
- Neuromorphic Drone Detection: an Event-RGB Multimodal Approach is a research paper that explores a novel approach to drone detection using a combination of event-based and RGB data.
- The key idea is to leverage the complementary strengths of event-based and RGB sensors to improve the reliability and performance of drone detection systems.
- The paper presents the design and evaluation of a multimodal neural network architecture that fuses event-based and RGB data to achieve robust and real-time drone detection.
Plain English Explanation
The paper introduces a new way to detect drones using two different types of camera sensors. Typical drone detection systems rely on regular RGB cameras, which can struggle in challenging conditions like low light or fast-moving drones.
To address this, the researchers used a combination of event-based and RGB sensors. Event-based cameras are like normal cameras, but they only record changes in the scene, rather than capturing full frames. This allows them to respond much faster to rapid motion, like a flying drone.
By combining the event-based and RGB data using a specialized neural network, the researchers were able to create a drone detection system that works reliably even in difficult conditions. The event-based data helps the system quickly pick up on the drone's movements, while the RGB data provides additional context and detail to confirm the detection.
The key benefit of this multimodal approach is that it can achieve accurate and responsive drone detection without requiring expensive, high-end hardware. This makes it a practical solution for applications like security, agriculture, or even hobbyist drone monitoring.
Technical Explanation
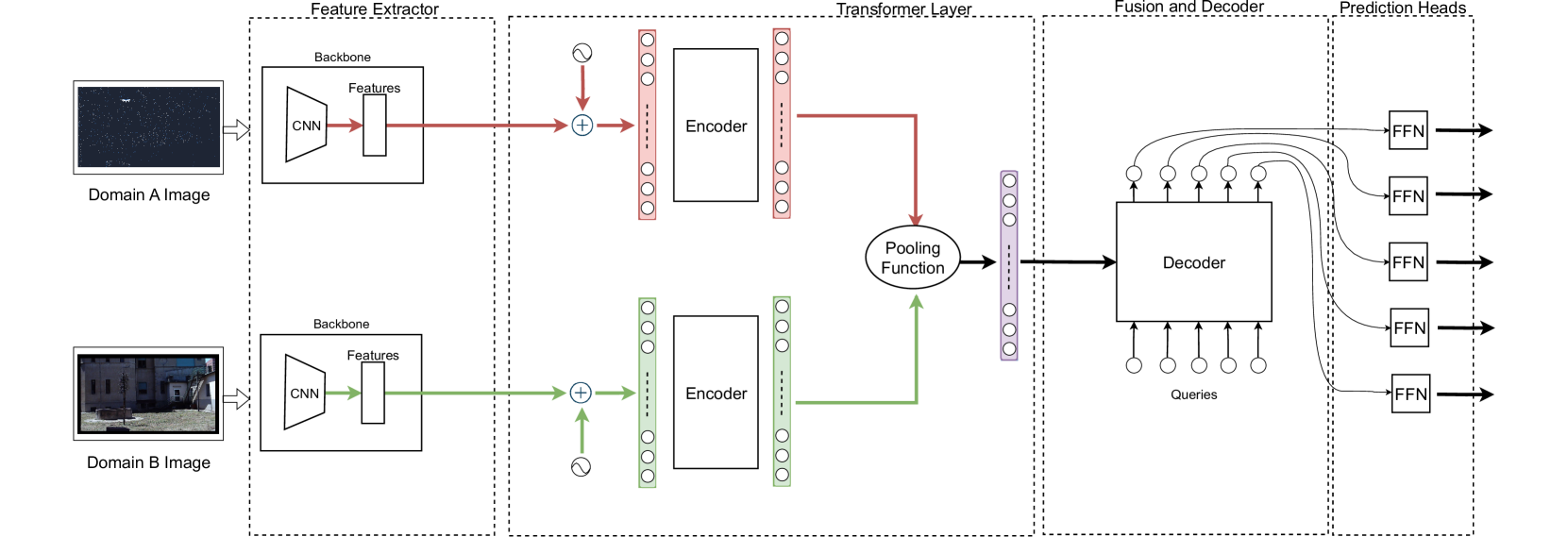
The paper presents a multimodal neural network architecture that fuses event-based and RGB data for drone detection. The event-based sensor captures temporal changes in the scene, while the RGB sensor provides color and texture information.
The proposed Event-RGB Fusion Network (ERFNet) takes the event-based and RGB inputs, processes them through separate convolutional backbones, and then combines the features using a fusion module. This allows the network to leverage the complementary strengths of the two modalities.
The authors evaluate the performance of ERFNet on a custom RGB/Event Drone Dataset, which contains synchronized event-based and RGB video recordings of various drone flight scenarios. They compare the multimodal approach to unimodal baselines using RGB or event-based data alone.
The results demonstrate that the Event-RGB Fusion Network achieves superior detection accuracy and real-time performance compared to the unimodal approaches. The event-based data helps the system quickly respond to the drone's motion, while the RGB data provides additional context to confirm the detections.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the proposed Event-RGB Fusion Network. The authors thoughtfully address the limitations of existing drone detection methods and provide a robust multimodal solution to overcome these challenges.
One potential limitation is the reliance on a custom dataset, which may not fully represent the diversity of real-world drone flight scenarios. It would be valuable to further validate the approach on more diverse and publicly available datasets.
Additionally, the paper does not extensively explore the failure modes or robustness of the proposed system. It would be helpful to understand the types of conditions or edge cases where the multimodal approach might still struggle, and how these could be addressed in future work.
Overall, the research makes a compelling case for the benefits of leveraging multimodal sensor fusion for reliable and responsive drone detection. The presented approach demonstrates the potential of combining event-based and RGB data to enable practical and cost-effective solutions for various drone-related applications.
Conclusion
This paper introduces a novel multimodal approach to drone detection that fuses event-based and RGB data using a specialized neural network architecture. The key contribution is the demonstration of how the complementary strengths of these two sensor modalities can be leveraged to achieve superior detection accuracy and real-time performance compared to unimodal methods.
The proposed Event-RGB Fusion Network represents an important step towards reliable and practical drone detection systems that can be deployed in a wide range of applications, from security and surveillance to precision agriculture and hobbyist drone monitoring. The research highlights the potential of multimodal sensor fusion to enable robust perception in challenging environments, which has broader implications for the field of computer vision and robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Neuromorphic Drone Detection: an Event-RGB Multimodal Approach
Gabriele Magrini, Federico Becattini, Pietro Pala, Alberto Del Bimbo, Antonio Porta
In recent years, drone detection has quickly become a subject of extreme interest: the potential for fast-moving objects of contained dimensions to be used for malicious intents or even terrorist attacks has posed attention to the necessity for precise and resilient systems for detecting and identifying such elements. While extensive literature and works exist on object detection based on RGB data, it is also critical to recognize the limits of such modality when applied to UAVs detection. Detecting drones indeed poses several challenges such as fast-moving objects and scenes with a high dynamic range or, even worse, scarce illumination levels. Neuromorphic cameras, on the other hand, can retain precise and rich spatio-temporal information in situations that are challenging for RGB cameras. They are resilient to both high-speed moving objects and scarce illumination settings, while prone to suffer a rapid loss of information when the objects in the scene are static. In this context, we present a novel model for integrating both domains together, leveraging multimodal data to take advantage of the best of both worlds. To this end, we also release NeRDD (Neuromorphic-RGB Drone Detection), a novel spatio-temporally synchronized Event-RGB Drone detection dataset of more than 3.5 hours of multimodal annotated recordings.
Read more9/25/2024

0
Neuromorphic Facial Analysis with Cross-Modal Supervision
Federico Becattini, Luca Cultrera, Lorenzo Berlincioni, Claudio Ferrari, Andrea Leonardo, Alberto Del Bimbo
Traditional approaches for analyzing RGB frames are capable of providing a fine-grained understanding of a face from different angles by inferring emotions, poses, shapes, landmarks. However, when it comes to subtle movements standard RGB cameras might fall behind due to their latency, making it hard to detect micro-movements that carry highly informative cues to infer the true emotions of a subject. To address this issue, the usage of event cameras to analyze faces is gaining increasing interest. Nonetheless, all the expertise matured for RGB processing is not directly transferrable to neuromorphic data due to a strong domain shift and intrinsic differences in how data is represented. The lack of labeled data can be considered one of the main causes of this gap, yet gathering data is harder in the event domain since it cannot be crawled from the web and labeling frames should take into account event aggregation rates and the fact that static parts might not be visible in certain frames. In this paper, we first present FACEMORPHIC, a multimodal temporally synchronized face dataset comprising both RGB videos and event streams. The data is labeled at a video level with facial Action Units and also contains streams collected with a variety of applications in mind, ranging from 3D shape estimation to lip-reading. We then show how temporal synchronization can allow effective neuromorphic face analysis without the need to manually annotate videos: we instead leverage cross-modal supervision bridging the domain gap by representing face shapes in a 3D space.
Read more9/17/2024
0
Real-Time Neuromorphic Navigation: Integrating Event-Based Vision and Physics-Driven Planning on a Parrot Bebop2 Quadrotor
Amogh Joshi, Sourav Sanyal, Kaushik Roy
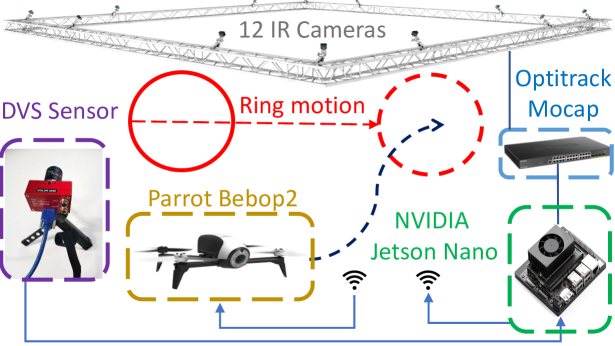
In autonomous aerial navigation, real-time and energy-efficient obstacle avoidance remains a significant challenge, especially in dynamic and complex indoor environments. This work presents a novel integration of neuromorphic event cameras with physics-driven planning algorithms implemented on a Parrot Bebop2 quadrotor. Neuromorphic event cameras, characterized by their high dynamic range and low latency, offer significant advantages over traditional frame-based systems, particularly in poor lighting conditions or during high-speed maneuvers. We use a DVS camera with a shallow Spiking Neural Network (SNN) for event-based object detection of a moving ring in real-time in an indoor lab. Further, we enhance drone control with physics-guided empirical knowledge inside a neural network training mechanism, to predict energy-efficient flight paths to fly through the moving ring. This integration results in a real-time, low-latency navigation system capable of dynamically responding to environmental changes while minimizing energy consumption. We detail our hardware setup, control loop, and modifications necessary for real-world applications, including the challenges of sensor integration without burdening the flight capabilities. Experimental results demonstrate the effectiveness of our approach in achieving robust, collision-free, and energy-efficient flight paths, showcasing the potential of neuromorphic vision and physics-driven planning in enhancing autonomous navigation systems.
Read more7/2/2024

0
Towards Robust Perception for Assistive Robotics: An RGB-Event-LiDAR Dataset and Multi-Modal Detection Pipeline
Adam Scicluna, Cedric Le Gentil, Sheila Sutjipto, Gavin Paul
The increasing adoption of human-robot interaction presents opportunities for technology to positively impact lives, particularly those with visual impairments, through applications such as guide-dog-like assistive robotics. We present a pipeline exploring the perception and intelligent disobedience required by such a system. A dataset of two people moving in and out of view has been prepared to compare RGB-based and event-based multi-modal dynamic object detection using LiDAR data for 3D position localisation. Our analysis highlights challenges in accurate 3D localisation using 2D image-LiDAR fusion, indicating the need for further refinement. Compared to the performance of the frame-based detection algorithm utilised (YOLOv4), current cutting-edge event-based detection models appear limited to contextual scenarios, such as for automotive platforms. This is highlighted by weak precision and recall over varying confidence and Intersection over Union (IoU) thresholds when using frame-based detections as a ground truth. Therefore, we have publicly released this dataset to the community, containing RGB, event, point cloud and Inertial Measurement Unit (IMU) data along with ground truth poses for the two people in the scene to fill a gap in the current landscape of publicly available datasets and provide a means to assist in the development of safer and more robust algorithms in the future: https://uts-ri.github.io/revel/.
Read more8/27/2024