Object-centric Reconstruction and Tracking of Dynamic Unknown Objects using 3D Gaussian Splatting
2405.20104
0
0
Abstract
Generalizable perception is one of the pillars of high-level autonomy in space robotics. Estimating the structure and motion of unknown objects in dynamic environments is fundamental for such autonomous systems. Traditionally, the solutions have relied on prior knowledge of target objects, multiple disparate representations, or low-fidelity outputs unsuitable for robotic operations. This work proposes a novel approach to incrementally reconstruct and track a dynamic unknown object using a unified representation -- a set of 3D Gaussian blobs that describe its geometry and appearance. The differentiable 3D Gaussian Splatting framework is adapted to a dynamic object-centric setting. The input to the pipeline is a sequential set of RGB-D images. 3D reconstruction and 6-DoF pose tracking tasks are tackled using first-order gradient-based optimization. The formulation is simple, requires no pre-training, assumes no prior knowledge of the object or its motion, and is suitable for online applications. The proposed approach is validated on a dataset of 10 unknown spacecraft of diverse geometry and texture under arbitrary relative motion. The experiments demonstrate successful 3D reconstruction and accurate 6-DoF tracking of the target object in proximity operations over a short to medium duration. The causes of tracking drift are discussed and potential solutions are outlined.
Create account to get full access
Overview
- This paper presents a novel approach for real-time reconstruction and tracking of unknown dynamic objects using 3D Gaussian splatting.
- The method can handle both rigid and non-rigid objects, and does not require any prior object models or semantic segmentation.
- It uses a 3D Gaussian splat representation to efficiently capture object shapes and motions, and employs a Kalman filter-based tracking framework for robust object-centric reconstruction.
Plain English Explanation
This research outlines a new way to digitally reconstruct and track the movement of unknown objects in real-time, using a technique called "3D Gaussian splatting." This approach can handle both rigid objects, like tables or chairs, as well as non-rigid, deformable objects, like a person or animal.
The key innovation is that it does not require any pre-existing 3D models or semantic understanding of the objects being observed. Instead, it uses a special data representation called "3D Gaussian splats" to efficiently capture the shape and motion of the objects. This allows it to reconstruct and track unknown objects as they move around, without needing to know what they are ahead of time.
At the core of the system is a Kalman filter-based tracking framework, which helps maintain a stable and robust object-centric reconstruction over time, even as the objects move and change shape. [This builds on prior work in techniques like SLAM and RGB-D reconstruction, but with a new focus on handling dynamic unknown objects.]
Technical Explanation
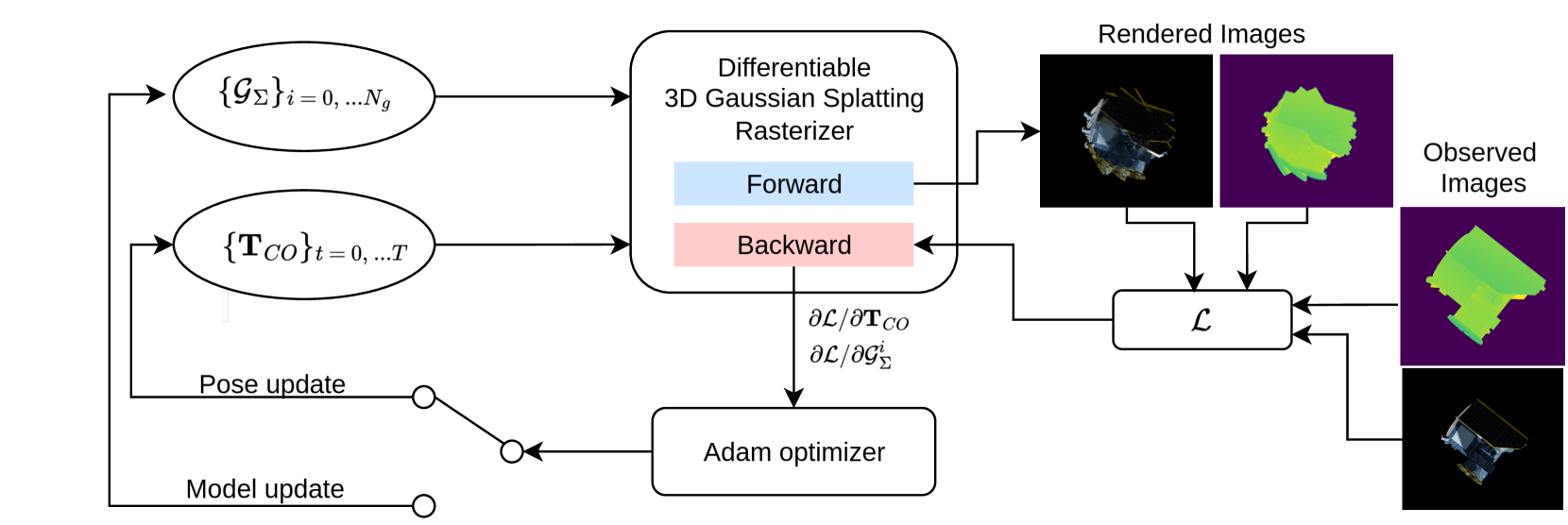
The paper introduces a novel object-centric 3D reconstruction and tracking framework that can handle unknown dynamic objects in real-time. The key innovation is the use of 3D Gaussian splatting to efficiently represent object shapes and motions, without requiring any prior object models or semantic segmentation.
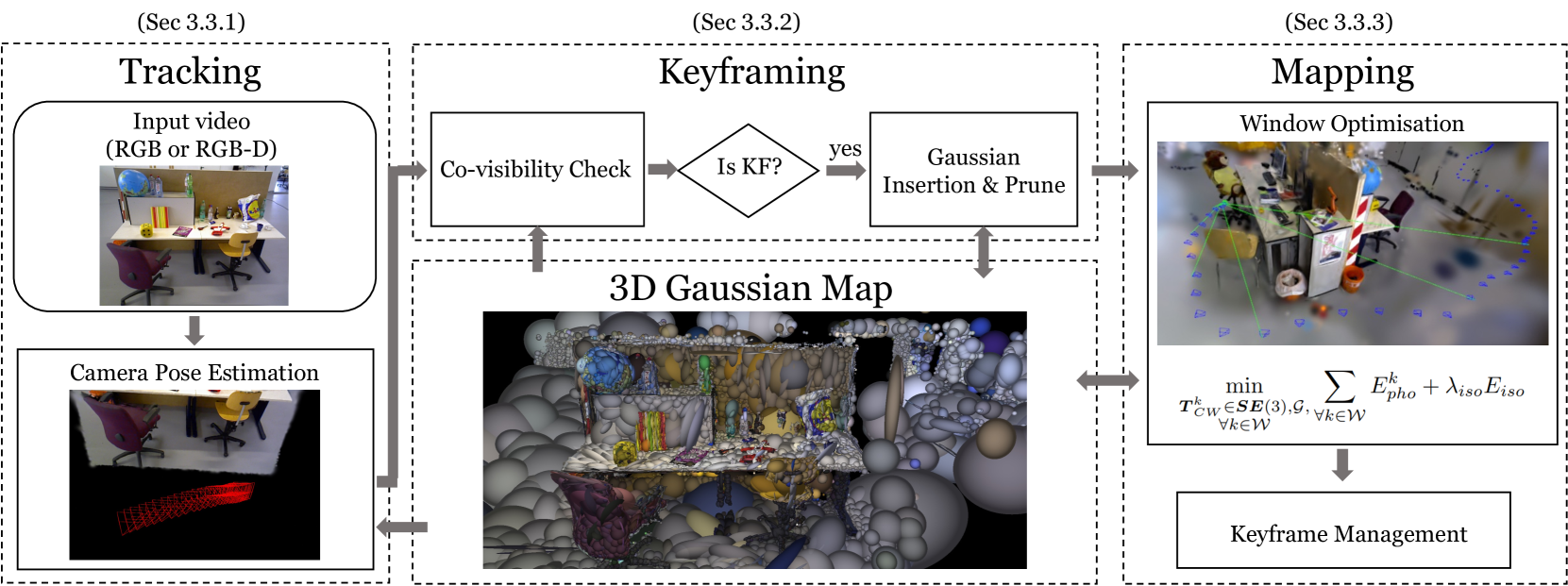
The system first extracts 3D point clouds from RGB-D sensor data, and then clusters them into individual object instances using a combination of motion cues and spatial proximity. Each object is then represented as a set of 3D Gaussian splats, which capture both the shape and motion of the object over time.
These Gaussian splat representations are then fed into a Kalman filter-based tracking framework, which maintains a consistent object-centric reconstruction even as the objects move and deform. The tracker also handles object interactions, splits, and merges, allowing it to robustly handle complex dynamic scenes.
The authors evaluate their approach on a range of real-world datasets, demonstrating its ability to accurately reconstruct and track unknown rigid and non-rigid objects in real-time. They show that it outperforms previous state-of-the-art methods in terms of reconstruction quality and tracking accuracy.
Critical Analysis
The paper presents a compelling and technically sophisticated approach for reconstructing and tracking unknown dynamic objects. However, there are a few potential limitations worth considering:
-
The method relies on accurate 3D point cloud extraction from RGB-D sensors, which can be challenging in low-light or cluttered environments. Additional robustness to sensor noise or missing data may be needed for real-world deployment.
-
While the Gaussian splat representation is efficient, it may struggle to capture fine details or complex topologies of certain objects. Exploring hybrid representations that combine Gaussian splats with other 3D primitives could be an area for future research.
-
The paper focuses on single-object tracking, but many real-world scenarios involve multiple interacting objects. Extending the approach to handle more complex multi-object dynamics could further broaden its applicability.
Overall, this work represents a significant advancement in the field of dynamic 3D scene understanding, with the potential for impact in a variety of applications, from robotic manipulation to augmented reality. Continued research and refinement of these techniques could lead to even more robust and versatile object-centric reconstruction systems.
Conclusion
This paper introduces a novel approach for real-time reconstruction and tracking of unknown dynamic objects using 3D Gaussian splatting. The method can handle both rigid and non-rigid objects, and does not require any prior object models or semantic segmentation. By efficiently representing object shapes and motions using Gaussian splats, and employing a Kalman filter-based tracking framework, the system is able to maintain robust object-centric reconstructions even in complex, dynamic scenes.
The technical evaluation demonstrates the method's superior performance compared to previous state-of-the-art approaches, and the authors discuss potential avenues for future research to further improve its capabilities. Overall, this work represents a significant advancement in the field of dynamic 3D scene understanding, with promising applications in areas like robotics, augmented reality, and autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Gaussian Splatting SLAM
Hidenobu Matsuki, Riku Murai, Paul H. J. Kelly, Andrew J. Davison
0
0
We present the first application of 3D Gaussian Splatting in monocular SLAM, the most fundamental but the hardest setup for Visual SLAM. Our method, which runs live at 3fps, utilises Gaussians as the only 3D representation, unifying the required representation for accurate, efficient tracking, mapping, and high-quality rendering. Designed for challenging monocular settings, our approach is seamlessly extendable to RGB-D SLAM when an external depth sensor is available. Several innovations are required to continuously reconstruct 3D scenes with high fidelity from a live camera. First, to move beyond the original 3DGS algorithm, which requires accurate poses from an offline Structure from Motion (SfM) system, we formulate camera tracking for 3DGS using direct optimisation against the 3D Gaussians, and show that this enables fast and robust tracking with a wide basin of convergence. Second, by utilising the explicit nature of the Gaussians, we introduce geometric verification and regularisation to handle the ambiguities occurring in incremental 3D dense reconstruction. Finally, we introduce a full SLAM system which not only achieves state-of-the-art results in novel view synthesis and trajectory estimation but also reconstruction of tiny and even transparent objects.
4/16/2024
📉
Gaussian Splatting: 3D Reconstruction and Novel View Synthesis, a Review
Anurag Dalal, Daniel Hagen, Kjell G. Robbersmyr, Kristian Muri Knausg{aa}rd
0
0
Image-based 3D reconstruction is a challenging task that involves inferring the 3D shape of an object or scene from a set of input images. Learning-based methods have gained attention for their ability to directly estimate 3D shapes. This review paper focuses on state-of-the-art techniques for 3D reconstruction, including the generation of novel, unseen views. An overview of recent developments in the Gaussian Splatting method is provided, covering input types, model structures, output representations, and training strategies. Unresolved challenges and future directions are also discussed. Given the rapid progress in this domain and the numerous opportunities for enhancing 3D reconstruction methods, a comprehensive examination of algorithms appears essential. Consequently, this study offers a thorough overview of the latest advancements in Gaussian Splatting.
5/7/2024

Guess The Unseen: Dynamic 3D Scene Reconstruction from Partial 2D Glimpses
Inhee Lee, Byungjun Kim, Hanbyul Joo
0
0
In this paper, we present a method to reconstruct the world and multiple dynamic humans in 3D from a monocular video input. As a key idea, we represent both the world and multiple humans via the recently emerging 3D Gaussian Splatting (3D-GS) representation, enabling to conveniently and efficiently compose and render them together. In particular, we address the scenarios with severely limited and sparse observations in 3D human reconstruction, a common challenge encountered in the real world. To tackle this challenge, we introduce a novel approach to optimize the 3D-GS representation in a canonical space by fusing the sparse cues in the common space, where we leverage a pre-trained 2D diffusion model to synthesize unseen views while keeping the consistency with the observed 2D appearances. We demonstrate our method can reconstruct high-quality animatable 3D humans in various challenging examples, in the presence of occlusion, image crops, few-shot, and extremely sparse observations. After reconstruction, our method is capable of not only rendering the scene in any novel views at arbitrary time instances, but also editing the 3D scene by removing individual humans or applying different motions for each human. Through various experiments, we demonstrate the quality and efficiency of our methods over alternative existing approaches.
4/23/2024

Splat-SLAM: Globally Optimized RGB-only SLAM with 3D Gaussians
Erik Sandstrom, Keisuke Tateno, Michael Oechsle, Michael Niemeyer, Luc Van Gool, Martin R. Oswald, Federico Tombari
0
0
3D Gaussian Splatting has emerged as a powerful representation of geometry and appearance for RGB-only dense Simultaneous Localization and Mapping (SLAM), as it provides a compact dense map representation while enabling efficient and high-quality map rendering. However, existing methods show significantly worse reconstruction quality than competing methods using other 3D representations, e.g. neural points clouds, since they either do not employ global map and pose optimization or make use of monocular depth. In response, we propose the first RGB-only SLAM system with a dense 3D Gaussian map representation that utilizes all benefits of globally optimized tracking by adapting dynamically to keyframe pose and depth updates by actively deforming the 3D Gaussian map. Moreover, we find that refining the depth updates in inaccurate areas with a monocular depth estimator further improves the accuracy of the 3D reconstruction. Our experiments on the Replica, TUM-RGBD, and ScanNet datasets indicate the effectiveness of globally optimized 3D Gaussians, as the approach achieves superior or on par performance with existing RGB-only SLAM methods methods in tracking, mapping and rendering accuracy while yielding small map sizes and fast runtimes. The source code is available at https://github.com/eriksandstroem/Splat-SLAM.
5/28/2024