Offline Model-Based Reinforcement Learning with Anti-Exploration

0

Sign in to get full access
Overview
- This paper proposes an offline model-based reinforcement learning (RL) method with an "anti-exploration" strategy to address the challenges of offline RL.
- The key ideas are using a model-based approach to efficiently leverage offline data, and an "anti-exploration" strategy to avoid visiting uncertain or risky states.
- Experiments show the method outperforms state-of-the-art offline RL algorithms on a range of benchmark tasks.
Plain English Explanation
In offline reinforcement learning, the agent learns from a fixed dataset of past experiences, without the ability to actively collect new data through exploration. This presents challenges, as the agent must learn an effective policy solely from the available data.
The proposed method tackles this by using a model-based approach. Instead of directly learning a policy from the data, the agent first learns a model of the environment dynamics. This model can then be used to efficiently plan and optimize a policy, without the need for risky exploration.
However, a key challenge with model-based RL is that the agent may become overly confident in its (potentially imperfect) model, leading it to visit states that are poorly captured by the model. To address this, the researchers introduce an "anti-exploration" strategy. This encourages the agent to avoid states that are highly uncertain or risky according to the model, focusing instead on states that are well-understood.
By combining the strengths of model-based RL and the anti-exploration approach, the method is able to effectively learn high-performing policies from offline data, without the pitfalls of overconfident model-based planning or risky exploration.
Technical Explanation
The paper presents an offline model-based RL algorithm called Offline Model-Based Reinforcement Learning with Anti-Exploration (OMBRE). The key components are:
-
Model Learning: The agent learns a dynamics model of the environment from the offline dataset, using standard model-based RL techniques.
-
Anti-Exploration: To avoid visiting states that are poorly captured by the model, the agent uses an "anti-exploration" strategy. This involves adding a penalty term to the model-based planning objective, which discourages the agent from visiting states with high epistemic uncertainty (i.e., states that are not well-represented in the training data).
-
Policy Optimization: With the learned dynamics model and the anti-exploration penalty, the agent can then optimize a policy using standard model-based RL planning methods, such as model-predictive control or value iteration.
The researchers evaluate OMBRE on a range of offline RL benchmark tasks, including classic control problems and challenging robotic manipulation scenarios. The results show that OMBRE outperforms state-of-the-art offline RL algorithms, such as conservative Q-learning and offline policy optimization.
Critical Analysis
The paper presents a novel and promising approach to offline model-based RL, addressing key challenges in this domain. The anti-exploration strategy is a clever way to mitigate the risks of model-based planning, where the agent may become overconfident in its (potentially imperfect) model.
However, the paper does not provide a thorough analysis of the limitations or potential drawbacks of the proposed method. For example, the anti-exploration strategy may be sensitive to the accuracy of the estimated model uncertainty, and could potentially lead to suboptimal policies if the uncertainty estimates are inaccurate.
Additionally, the paper does not discuss the scalability of the method to larger, more complex environments. The computational overhead of learning the dynamics model and performing the anti-exploration planning may become prohibitive in high-dimensional or continuous state-action spaces.
Further research could explore ways to improve the robustness and scalability of the anti-exploration approach, as well as investigate alternative strategies for mitigating the risks of model-based planning in offline RL.
Conclusion
This paper presents a novel offline model-based RL algorithm that combines the strengths of model-based planning and an "anti-exploration" strategy to address the challenges of learning from fixed datasets. The method demonstrates strong performance on a range of benchmark tasks, suggesting it as a promising approach for tackling offline RL problems.
While the paper does not fully explore the limitations of the proposed method, it introduces an interesting and potentially impactful idea for improving the safety and reliability of model-based RL in offline settings. As the field of offline RL continues to advance, approaches like OMBRE may play an important role in enabling RL agents to learn effectively from limited, offline data.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Offline Model-Based Reinforcement Learning with Anti-Exploration
Padmanaba Srinivasan, William Knottenbelt
Model-based reinforcement learning (MBRL) algorithms learn a dynamics model from collected data and apply it to generate synthetic trajectories to enable faster learning. This is an especially promising paradigm in offline reinforcement learning (RL) where data may be limited in quantity, in addition to being deficient in coverage and quality. Practical approaches to offline MBRL usually rely on ensembles of dynamics models to prevent exploitation of any individual model and to extract uncertainty estimates that penalize values in states far from the dataset support. Uncertainty estimates from ensembles can vary greatly in scale, making it challenging to generalize hyperparameters well across even similar tasks. In this paper, we present Morse Model-based offline RL (MoMo), which extends the anti-exploration paradigm found in offline model-free RL to the model-based space. We develop model-free and model-based variants of MoMo and show how the model-free version can be extended to detect and deal with out-of-distribution (OOD) states using explicit uncertainty estimation without the need for large ensembles. MoMo performs offline MBRL using an anti-exploration bonus to counteract value overestimation in combination with a policy constraint, as well as a truncation function to terminate synthetic rollouts that are excessively OOD. Experimentally, we find that both model-free and model-based MoMo perform well, and the latter outperforms prior model-based and model-free baselines on the majority of D4RL datasets tested.
Read more8/21/2024

0
World Models Increase Autonomy in Reinforcement Learning
Zhao Yang, Thomas M. Moerland, Mike Preuss, Aske Plaat, Edward S. Hu
Reinforcement learning (RL) is an appealing paradigm for training intelligent agents, enabling policy acquisition from the agent's own autonomously acquired experience. However, the training process of RL is far from automatic, requiring extensive human effort to reset the agent and environments. To tackle the challenging reset-free setting, we first demonstrate the superiority of model-based (MB) RL methods in such setting, showing that a straightforward adaptation of MBRL can outperform all the prior state-of-the-art methods while requiring less supervision. We then identify limitations inherent to this direct extension and propose a solution called model-based reset-free (MoReFree) agent, which further enhances the performance. MoReFree adapts two key mechanisms, exploration and policy learning, to handle reset-free tasks by prioritizing task-relevant states. It exhibits superior data-efficiency across various reset-free tasks without access to environmental reward or demonstrations while significantly outperforming privileged baselines that require supervision. Our findings suggest model-based methods hold significant promise for reducing human effort in RL. Website: https://sites.google.com/view/morefree
Read more8/21/2024
🏅
0
Model-Free Active Exploration in Reinforcement Learning
Alessio Russo, Alexandre Proutiere
We study the problem of exploration in Reinforcement Learning and present a novel model-free solution. We adopt an information-theoretical viewpoint and start from the instance-specific lower bound of the number of samples that have to be collected to identify a nearly-optimal policy. Deriving this lower bound along with the optimal exploration strategy entails solving an intricate optimization problem and requires a model of the system. In turn, most existing sample optimal exploration algorithms rely on estimating the model. We derive an approximation of the instance-specific lower bound that only involves quantities that can be inferred using model-free approaches. Leveraging this approximation, we devise an ensemble-based model-free exploration strategy applicable to both tabular and continuous Markov decision processes. Numerical results demonstrate that our strategy is able to identify efficient policies faster than state-of-the-art exploration approaches
Read more7/2/2024
0
Tackling Long-Horizon Tasks with Model-based Offline Reinforcement Learning
Kwanyoung Park, Youngwoon Lee
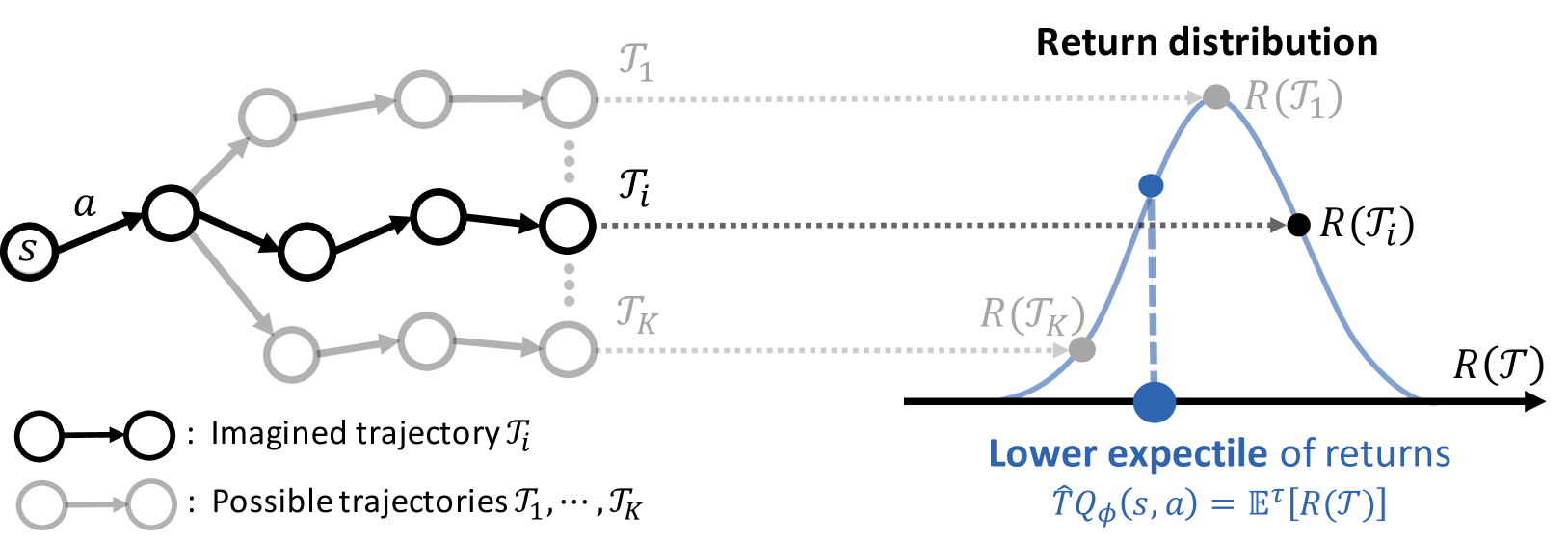
Model-based offline reinforcement learning (RL) is a compelling approach that addresses the challenge of learning from limited, static data by generating imaginary trajectories using learned models. However, it falls short in solving long-horizon tasks due to high bias in value estimation from model rollouts. In this paper, we introduce a novel model-based offline RL method, Lower Expectile Q-learning (LEQ), which enhances long-horizon task performance by mitigating the high bias in model-based value estimation via expectile regression of $lambda$-returns. Our empirical results show that LEQ significantly outperforms previous model-based offline RL methods on long-horizon tasks, such as the D4RL AntMaze tasks, matching or surpassing the performance of model-free approaches. Our experiments demonstrate that expectile regression, $lambda$-returns, and critic training on offline data are all crucial for addressing long-horizon tasks. Additionally, LEQ achieves performance comparable to the state-of-the-art model-based and model-free offline RL methods on the NeoRL benchmark and the D4RL MuJoCo Gym tasks.
Read more7/2/2024