Online Event-Triggered Switching for Frequency Control in Power Grids with Variable Inertia

0

Sign in to get full access
Overview
- The paper proposes an online event-triggered switching approach for primary frequency control in power grids with variable inertia.
- The approach uses reinforcement learning to adaptively switch between different control strategies based on real-time grid conditions.
- The goal is to maintain grid frequency stability while accounting for the challenges posed by renewable energy integration and variable inertia.
Plain English Explanation
In power grids, maintaining a stable frequency is crucial for reliable electricity supply. Traditionally, this was achieved through the use of large, spinning generators that provided a consistent level of "inertia" to the system.
However, as more renewable energy sources like wind and solar are integrated into the grid, the overall system inertia can become more variable and unpredictable. This can make it challenging to keep the grid frequency within tight tolerances, which is necessary to prevent system instability and blackouts.
The researchers in this paper have developed a new approach to address this problem. Their solution uses a reinforcement learning algorithm to continuously monitor the grid conditions and adaptively switch between different control strategies in real-time. This allows the system to respond quickly to changes in inertia and other factors, helping to maintain grid frequency stability.
By using this event-triggered switching approach, the researchers aim to improve the reliability and resilience of power grids as they transition towards a more renewable-heavy energy mix. The adaptive nature of the algorithm means that it can adjust its behavior based on the specific challenges faced by each individual power grid, making it a flexible and potentially widely applicable solution.
Technical Explanation
The paper proposes an online event-triggered switching approach for primary frequency control in power grids with variable inertia. The key elements of the approach include:
-
Hybrid System Model: The power grid is modeled as a nonlinear, hybrid system that combines continuous-time dynamics (e.g., generator rotor angle) with discrete-time control switching events.
-
Reinforcement Learning-based Control: A reinforcement learning algorithm is used to adaptively select the appropriate control strategy (e.g., droop control, inertia emulation) based on real-time grid conditions. This allows the system to respond quickly to changes in inertia and other factors.
-
Event-Triggered Switching: The switching between control strategies is triggered by events, such as significant deviations in grid frequency, rather than at fixed time intervals. This helps to minimize unnecessary control actions and conserve system resources.
-
Theoretical Analysis: The researchers provide a theoretical analysis of the stability and convergence properties of the proposed approach, demonstrating its ability to maintain grid frequency within acceptable limits under various operating conditions.
-
Simulation Results: The effectiveness of the approach is validated through detailed simulations of a power grid model, showcasing its ability to outperform traditional frequency control methods in terms of frequency regulation and system resilience.
Critical Analysis
The paper addresses an important challenge in modern power systems: maintaining grid frequency stability in the face of increasing renewable energy integration and variable system inertia. The proposed event-triggered switching approach using reinforcement learning is a novel and promising solution to this problem.
One potential limitation of the research is that it is primarily based on simulation studies, and further validation through real-world deployment and testing would be beneficial to assess the practical implications and any potential implementation challenges.
Additionally, the paper does not explicitly consider the impact of communication delays or failures, which could be an important factor in the real-world deployment of such a distributed control system. Addressing these aspects in future research would help to strengthen the practical applicability of the proposed approach.
Conclusion
This paper presents an innovative solution to the challenge of primary frequency control in power grids with variable inertia. By using a reinforcement learning-based event-triggered switching approach, the proposed method can adaptively adjust the control strategy to maintain grid frequency stability in the face of changing system conditions.
The technical details and simulation results demonstrate the potential of this approach to improve the reliability and resilience of power grids as they transition towards a more renewable-heavy energy mix. Further research and real-world validation could help to refine and expand the applicability of this promising frequency control solution.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Online Event-Triggered Switching for Frequency Control in Power Grids with Variable Inertia
Jie Feng, Wenqi Cui, Jorge Cort'es, Yuanyuan Shi
The increasing integration of renewable energy resources into power grids has led to time-varying system inertia and consequent degradation in frequency dynamics. A promising solution to alleviate performance degradation is using power electronics interfaced energy resources, such as renewable generators and battery energy storage for primary frequency control, by adjusting their power output set-points in response to frequency deviations. However, designing a frequency controller under time-varying inertia is challenging. Specifically, the stability or optimality of controllers designed for time-invariant systems can be compromised once applied to a time-varying system. We model the frequency dynamics under time-varying inertia as a nonlinear switching system, where the frequency dynamics under each mode are described by the nonlinear swing equations and different modes represent different inertia levels. We identify a key controller structure, named Neural Proportional-Integral (Neural-PI) controller, that guarantees exponential input-to-state stability for each mode. To further improve performance, we present an online event-triggered switching algorithm to select the most suitable controller from a set of Neural-PI controllers, each optimized for specific inertia levels. Simulations on the IEEE 39-bus system validate the effectiveness of the proposed online switching control method with stability guarantees and optimized performance for frequency control under time-varying inertia.
Read more8/29/2024

0
An integrated design of robust decentralized observer and controller for load frequency control
Xianxian Zhao, Jianglin Lan
This paper focuses on designing completely decentralized load frequency control (LFC) for multi-area power systems to achieve global optimized performance. To this end, a new concept of integrated design is introduced for designing the decentralized LFC observers and controllers simultaneously off-line, by taking into account of the interactions between areas and the bidirectional effects between the local observer and controller in each area. The integrated design in this paper is realized via $H_infty$ optimization with a single-step linear matrix inequality (LMI) formulation. The LMI regional eigenvalue assignment technique is further incorporated with $H_infty$ optimization to improve the closed-loop system transient performance. A three-area power system is simulated to validate the superiority of the proposed integrated design over the conventional decentralized designs.
Read more9/17/2024
0
Online learning for robust voltage control under uncertain grid topology
Christopher Yeh, Jing Yu, Yuanyuan Shi, Adam Wierman
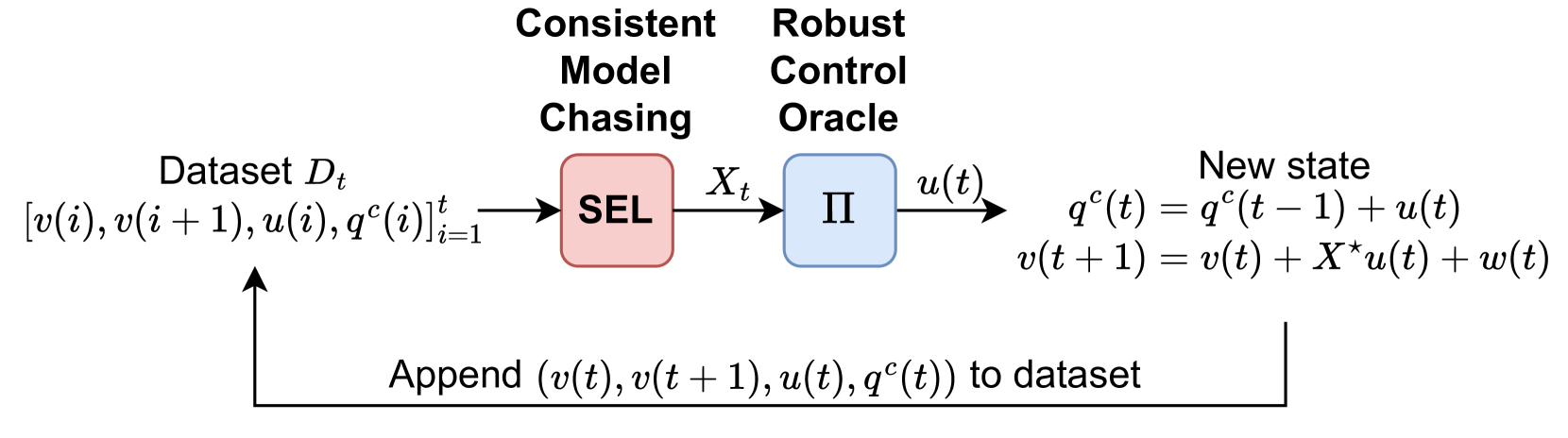
Voltage control generally requires accurate information about the grid's topology in order to guarantee network stability. However, accurate topology identification is challenging for existing methods, especially as the grid is subject to increasingly frequent reconfiguration due to the adoption of renewable energy. In this work, we combine a nested convex body chasing algorithm with a robust predictive controller to achieve provably finite-time convergence to safe voltage limits in the online setting where there is uncertainty in both the network topology as well as load and generation variations. In an online fashion, our algorithm narrows down the set of possible grid models that are consistent with observations and adjusts reactive power generation accordingly to keep voltages within desired safety limits. Our approach can also incorporate existing partial knowledge of the network to improve voltage control performance. We demonstrate the effectiveness of our approach in a case study on a Southern California Edison 56-bus distribution system. Our experiments show that in practical settings, the controller is indeed able to narrow the set of consistent topologies quickly enough to make control decisions that ensure stability in both linearized and realistic non-linear models of the distribution grid.
Read more4/1/2024
👨🏫
0
A Cloud-Edge Framework for Energy-Efficient Event-Driven Control: An Integration of Online Supervised Learning, Spiking Neural Networks and Local Plasticity Rules
Reza Ahmadvand, Sarah Safura Sharif, Yaser Mike Banad
This paper presents a novel cloud-edge framework for addressing computational and energy constraints in complex control systems. Our approach centers around a learning-based controller using Spiking Neural Networks (SNN) on physical plants. By integrating a biologically plausible learning method with local plasticity rules, we harness the efficiency, scalability, and low latency of SNNs. This design replicates control signals from a cloud-based controller directly on the plant, reducing the need for constant plant-cloud communication. The plant updates weights only when errors surpass predefined thresholds, ensuring efficiency and robustness in various conditions. Applied to linear workbench systems and satellite rendezvous scenarios, including obstacle avoidance, our architecture dramatically lowers normalized tracking error by 96% with increased network size. The event-driven nature of SNNs minimizes energy consumption, utilizing only about 111 nJ (0.3% of conventional computing requirements). The results demonstrate the system's adjustment to changing work environments and its efficient use of computational and energy resources, with a moderate increase in energy consumption of 27.2% and 37% for static and dynamic obstacles, respectively, compared to non-obstacle scenarios.
Read more5/7/2024