OV-Uni3DETR: Towards Unified Open-Vocabulary 3D Object Detection via Cycle-Modality Propagation

0
Sign in to get full access
Overview
- OV-Uni3DETR is a new approach for open-vocabulary 3D object detection
- It aims to unify 2D and 3D object detection models to work with any object label
- The key idea is "cycle-modality propagation" to transfer knowledge between 2D and 3D
Plain English Explanation
OV-Uni3DETR is a new system that can detect 3D objects in point cloud data using any object label, not just a pre-defined set. It works by connecting 2D and 3D object detection models, allowing them to share and transfer knowledge about different objects.
The core insight is a technique called "cycle-modality propagation." This allows the 2D and 3D models to learn from each other, so they can recognize a wider variety of objects. For example, the 2D model might learn about new object categories from the 3D model, and vice versa.
This is an important advancement, as previous 3D object detectors were limited to a fixed set of object classes. OV-Uni3DETR overcomes this by linking the 2D and 3D models, enabling them to work with any object label, even ones they haven't seen before.
Technical Explanation
OV-Uni3DETR builds on the DETR architecture for object detection, integrating it with a 3D detection backbone. The key innovation is the "cycle-modality propagation" module, which allows the 2D and 3D models to learn from each other.
This module consists of two components:
- Modality-Specific Feature Extraction: The 2D and 3D models extract their own unique visual and geometric features, respectively.
- Cross-Modality Feature Propagation: The models then exchange these features, allowing them to learn complementary information about objects.
By propagating features between the 2D and 3D models in this cyclical manner, OV-Uni3DETR can develop a unified understanding of objects, enabling open-vocabulary detection in 3D point clouds.
The authors evaluate OV-Uni3DETR on standard 3D object detection benchmarks, showing it outperforms previous open-vocabulary methods. It also exhibits strong zero-shot transfer, detecting objects it has never seen before.
Critical Analysis
The authors acknowledge that OV-Uni3DETR has some limitations. For example, the cross-modality feature propagation relies on closely aligned 2D and 3D inputs, which may not always be available in real-world scenarios.
Additionally, the paper does not explore the model's robustness to noisy or partial point cloud data, which is common in real-world 3D sensing applications. Further research would be needed to understand how OV-Uni3DETR performs in more challenging, real-world conditions.
That said, the core idea of linking 2D and 3D object detection to enable open-vocabulary 3D recognition is a promising direction. By bridging these modalities, OV-Uni3DETR takes an important step towards more versatile and applicable 3D object detection systems.
Conclusion
OV-Uni3DETR introduces a novel approach for open-vocabulary 3D object detection, using "cycle-modality propagation" to unify 2D and 3D models. This allows the system to recognize a wide range of objects, even ones it hasn't seen before, by leveraging the complementary strengths of 2D and 3D perception.
While the technique has some limitations, it represents a significant advancement in the field of 3D object detection. By breaking free of pre-defined object categories, OV-Uni3DETR lays the groundwork for more flexible and adaptable 3D vision systems, with potential applications in robotics, autonomous vehicles, and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
OV-Uni3DETR: Towards Unified Open-Vocabulary 3D Object Detection via Cycle-Modality Propagation
Zhenyu Wang, Yali Li, Taichi Liu, Hengshuang Zhao, Shengjin Wang
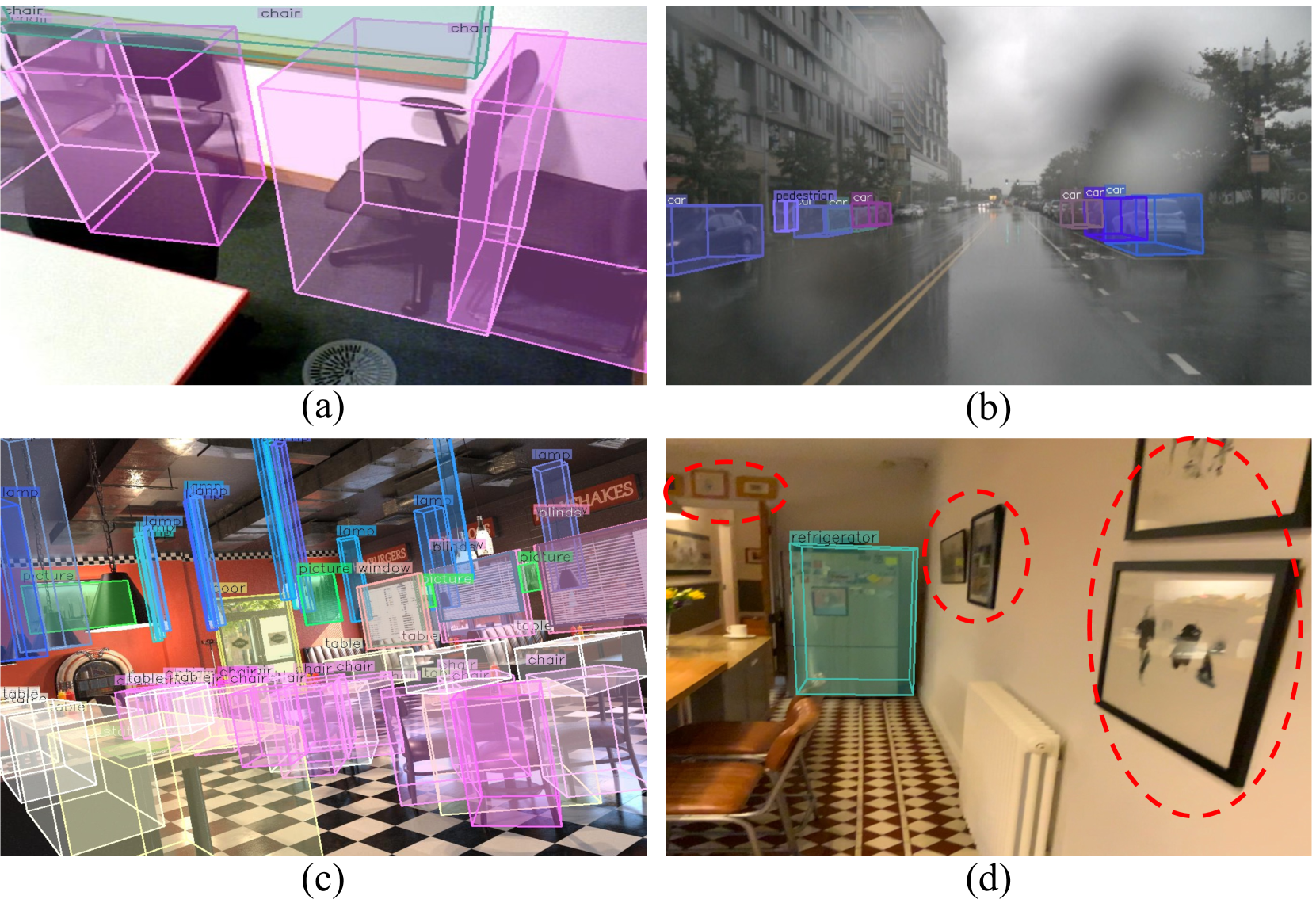
In the current state of 3D object detection research, the severe scarcity of annotated 3D data, substantial disparities across different data modalities, and the absence of a unified architecture, have impeded the progress towards the goal of universality. In this paper, we propose textbf{OV-Uni3DETR}, a unified open-vocabulary 3D detector via cycle-modality propagation. Compared with existing 3D detectors, OV-Uni3DETR offers distinct advantages: 1) Open-vocabulary 3D detection: During training, it leverages various accessible data, especially extensive 2D detection images, to boost training diversity. During inference, it can detect both seen and unseen classes. 2) Modality unifying: It seamlessly accommodates input data from any given modality, effectively addressing scenarios involving disparate modalities or missing sensor information, thereby supporting test-time modality switching. 3) Scene unifying: It provides a unified multi-modal model architecture for diverse scenes collected by distinct sensors. Specifically, we propose the cycle-modality propagation, aimed at propagating knowledge bridging 2D and 3D modalities, to support the aforementioned functionalities. 2D semantic knowledge from large-vocabulary learning guides novel class discovery in the 3D domain, and 3D geometric knowledge provides localization supervision for 2D detection images. OV-Uni3DETR achieves the state-of-the-art performance on various scenarios, surpassing existing methods by more than 6% on average. Its performance using only RGB images is on par with or even surpasses that of previous point cloud based methods. Code and pre-trained models will be released later.
Read more7/24/2024

0
Unlocking Textual and Visual Wisdom: Open-Vocabulary 3D Object Detection Enhanced by Comprehensive Guidance from Text and Image
Pengkun Jiao, Na Zhao, Jingjing Chen, Yu-Gang Jiang
Open-vocabulary 3D object detection (OV-3DDet) aims to localize and recognize both seen and previously unseen object categories within any new 3D scene. While language and vision foundation models have achieved success in handling various open-vocabulary tasks with abundant training data, OV-3DDet faces a significant challenge due to the limited availability of training data. Although some pioneering efforts have integrated vision-language models (VLM) knowledge into OV-3DDet learning, the full potential of these foundational models has yet to be fully exploited. In this paper, we unlock the textual and visual wisdom to tackle the open-vocabulary 3D detection task by leveraging the language and vision foundation models. We leverage a vision foundation model to provide image-wise guidance for discovering novel classes in 3D scenes. Specifically, we utilize a object detection vision foundation model to enable the zero-shot discovery of objects in images, which serves as the initial seeds and filtering guidance to identify novel 3D objects. Additionally, to align the 3D space with the powerful vision-language space, we introduce a hierarchical alignment approach, where the 3D feature space is aligned with the vision-language feature space using a pre-trained VLM at the instance, category, and scene levels. Through extensive experimentation, we demonstrate significant improvements in accuracy and generalization, highlighting the potential of foundation models in advancing open-vocabulary 3D object detection in real-world scenarios.
Read more7/18/2024
0
UniMODE: Unified Monocular 3D Object Detection
Zhuoling Li, Xiaogang Xu, SerNam Lim, Hengshuang Zhao
Realizing unified monocular 3D object detection, including both indoor and outdoor scenes, holds great importance in applications like robot navigation. However, involving various scenarios of data to train models poses challenges due to their significantly different characteristics, e.g., diverse geometry properties and heterogeneous domain distributions. To address these challenges, we build a detector based on the bird's-eye-view (BEV) detection paradigm, where the explicit feature projection is beneficial to addressing the geometry learning ambiguity when employing multiple scenarios of data to train detectors. Then, we split the classical BEV detection architecture into two stages and propose an uneven BEV grid design to handle the convergence instability caused by the aforementioned challenges. Moreover, we develop a sparse BEV feature projection strategy to reduce computational cost and a unified domain alignment method to handle heterogeneous domains. Combining these techniques, a unified detector UniMODE is derived, which surpasses the previous state-of-the-art on the challenging Omni3D dataset (a large-scale dataset including both indoor and outdoor scenes) by 4.9% AP_3D, revealing the first successful generalization of a BEV detector to unified 3D object detection.
Read more5/10/2024

0
UniM-OV3D: Uni-Modality Open-Vocabulary 3D Scene Understanding with Fine-Grained Feature Representation
Qingdong He, Jinlong Peng, Zhengkai Jiang, Kai Wu, Xiaozhong Ji, Jiangning Zhang, Yabiao Wang, Chengjie Wang, Mingang Chen, Yunsheng Wu
3D open-vocabulary scene understanding aims to recognize arbitrary novel categories beyond the base label space. However, existing works not only fail to fully utilize all the available modal information in the 3D domain but also lack sufficient granularity in representing the features of each modality. In this paper, we propose a unified multimodal 3D open-vocabulary scene understanding network, namely UniM-OV3D, which aligns point clouds with image, language and depth. To better integrate global and local features of the point clouds, we design a hierarchical point cloud feature extraction module that learns comprehensive fine-grained feature representations. Further, to facilitate the learning of coarse-to-fine point-semantic representations from captions, we propose the utilization of hierarchical 3D caption pairs, capitalizing on geometric constraints across various viewpoints of 3D scenes. Extensive experimental results demonstrate the effectiveness and superiority of our method in open-vocabulary semantic and instance segmentation, which achieves state-of-the-art performance on both indoor and outdoor benchmarks such as ScanNet, ScanNet200, S3IDS and nuScenes. Code is available at https://github.com/hithqd/UniM-OV3D.
Read more4/23/2024