Path planning of magnetic microswimmers in high-fidelity simulations of capillaries with deep reinforcement learning
2404.02171
0
0
Abstract
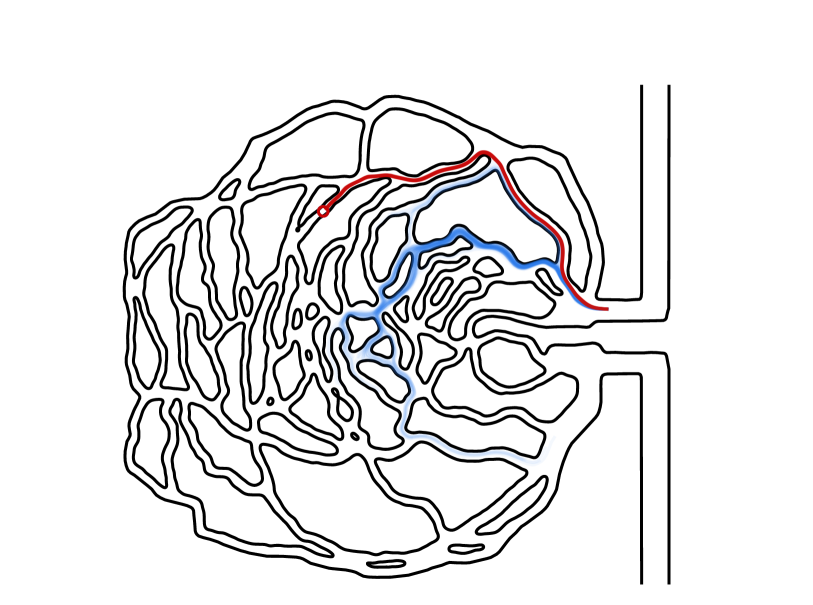
Biomedical applications such as targeted drug delivery, microsurgery or sensing rely on reaching precise areas within the body in a minimally invasive way. Artificial bacterial flagella (ABFs) have emerged as potential tools for this task by navigating through the circulatory system. While the control and swimming characteristics of ABFs is understood in simple scenarios, their behavior within the bloodstream remains unclear. We conduct simulations of ABFs evolving in the complex capillary networks found in the human retina. The ABF is robustly guided to a prescribed target by a reinforcement learning agent previously trained on a reduced order model.
Create account to get full access
Overview
- The paper explores using deep reinforcement learning to plan the path of magnetic microswimmers (tiny robots) as they navigate through simulated capillaries.
- The researchers developed a high-fidelity simulation environment to realistically model the complex fluid dynamics and physical constraints of the capillary network.
- The deep reinforcement learning algorithm enables the microswimmers to learn how to efficiently navigate through the capillaries and avoid obstacles.
Plain English Explanation
Imagine you have a tiny robot that's small enough to swim through the blood vessels in your body. These robots, called "magnetic microswimmers," could one day be used for medical tasks like delivering drugs or performing repairs inside the body.
To make these microswimmers work effectively, scientists need to figure out the best way for them to navigate through the intricate network of tiny blood vessels, called capillaries. The capillaries have complex fluid flows and physical constraints that make it challenging for the microswimmers to find their way around.
In this research, the scientists developed a detailed computer simulation of the capillary network that accurately models all the tricky fluid dynamics and physical barriers the microswimmers would encounter. They then used a powerful AI technique called "deep reinforcement learning" to train the microswimmers on how to effectively navigate through this simulated capillary environment.
The deep reinforcement learning algorithm allows the microswimmers to "learn" the best paths through trial and error, just like a person learning a new skill. Over time, the microswimmers get better and better at finding the most efficient routes through the capillaries, while also avoiding obstacles and staying on track.
This research is an important step towards making magnetic microswimmers a practical reality for medical applications. By developing advanced simulation tools and AI-powered navigation, the scientists are paving the way for these tiny robots to one day travel through our bodies and perform useful tasks to improve our health.
Technical Explanation
The paper presents a novel approach for planning the paths of magnetic microswimmers navigating through high-fidelity simulations of capillary networks using deep reinforcement learning.
The researchers first developed a detailed computational fluid dynamics (CFD) simulation environment to model the complex fluid flow and physical constraints of capillary networks. This simulation accounted for factors such as the viscosity of blood, the deformation of red blood cells, and the narrow, winding geometry of the capillaries.
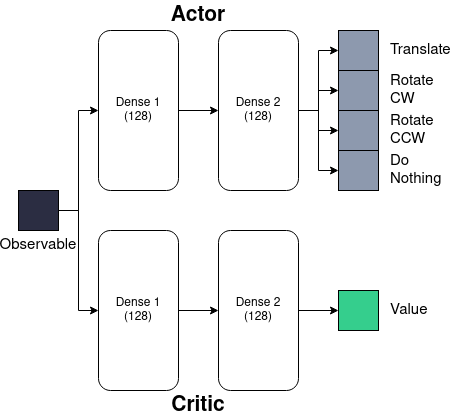
They then trained a deep reinforcement learning agent to control the motion of the magnetic microswimmers within this simulated environment. The agent was given information about the current state of the microswimmer (position, orientation, velocity, etc.) and the surrounding capillary geometry as inputs. It then learned, through a trial-and-error process, how to select actions (changes in magnetic field) that would guide the microswimmer along an efficient path to a given target location, while avoiding collisions with the capillary walls.
The experiments demonstrated that the deep reinforcement learning agent was able to successfully navigate the microswimmers through complex capillary networks, outperforming traditional path planning algorithms. The trained agent exhibited robust and adaptive behavior, able to handle changes in the environment, such as the presence of obstacles or variations in the capillary structure.
Critical Analysis
The paper makes a strong case for the potential of deep reinforcement learning to enable effective navigation of magnetic microswimmers through realistic capillary environments. The high-fidelity simulation model developed by the researchers is a significant contribution, as it provides a more accurate representation of the complex fluid dynamics and physical constraints that would be encountered in vivo.
However, the paper does not address some important limitations and considerations for applying this technology in real-world medical scenarios. For example, the simulation assumes a static capillary network, whereas in reality, the vasculature is dynamic and can change over time due to factors like inflammation or disease. The researchers also do not discuss how their approach would scale to navigate through the entire circulatory system, rather than just isolated capillary segments.
Additionally, the safety and biocompatibility of the magnetic microswimmers themselves are not discussed. Potential issues like immune system responses, off-target effects, and long-term impacts on human health would need to be thoroughly investigated before this technology could be considered for clinical applications.
Further research is also needed to demonstrate the transferability of the trained deep reinforcement learning models to physical microswimmer prototypes, as there may be discrepancies between the simulated and real-world environments that could impact the performance of the navigation algorithms.
Conclusion
This research represents an important step forward in developing intelligent navigation systems for magnetic microswimmers in the context of biomedical applications. By combining high-fidelity simulations of capillary networks with deep reinforcement learning, the researchers have shown the potential for these tiny robots to autonomously find their way through the intricate blood vessel system.
While there are still significant challenges to overcome before this technology can be translated to real-world medical interventions, this work lays the groundwork for further advancements in the field of microrobotics and in-vivo medical procedures. If successful, magnetic microswimmers guided by advanced AI-powered navigation could one day revolutionize how we diagnose, monitor, and treat various health conditions from within the human body.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤷
Bundling and Tumbling in Bacterial-inspired Bi-flagellated Soft Robots for Attitude Adjustment
Zhuonan Hao, Siddharth Zalavadia, Mohammad Khalid Jawed
0
0
We create a mechanism inspired by bacterial swimmers, featuring two flexible flagella with individual control over rotation speed and direction in viscous fluid environments. Using readily available materials, we design and fabricate silicone-based helical flagella. To simulate the robot's motion, we develop a physics-based computational tool, drawing inspiration from computer graphics. The framework incorporates the Discrete Elastic Rod method, modeling the flagella as Kirchhoff's elastic rods, and couples it with the Regularized Stokeslet Segments method for hydrodynamics, along with the Implicit Contact Model to handle contact. This approach effectively captures polymorphic phenomena like bundling and tumbling. Our study reveals how these emergent behaviors affect the robot's attitude angles, demonstrating its ability to self-reorient in both simulations and experiments. We anticipate that this framework will enhance our understanding of the directional change capabilities of flagellated robots, potentially stimulating further exploration on microscopic robot mobility.
5/7/2024
Emergence of Chemotactic Strategies with Multi-Agent Reinforcement Learning
Samuel Tovey, Christoph Lohrmann, Christian Holm
0
0
Reinforcement learning (RL) is a flexible and efficient method for programming micro-robots in complex environments. Here we investigate whether reinforcement learning can provide insights into biological systems when trained to perform chemotaxis. Namely, whether we can learn about how intelligent agents process given information in order to swim towards a target. We run simulations covering a range of agent shapes, sizes, and swim speeds to determine if the physical constraints on biological swimmers, namely Brownian motion, lead to regions where reinforcement learners' training fails. We find that the RL agents can perform chemotaxis as soon as it is physically possible and, in some cases, even before the active swimming overpowers the stochastic environment. We study the efficiency of the emergent policy and identify convergence in agent size and swim speeds. Finally, we study the strategy adopted by the reinforcement learning algorithm to explain how the agents perform their tasks. To this end, we identify three emerging dominant strategies and several rare approaches taken. These strategies, whilst producing almost identical trajectories in simulation, are distinct and give insight into the possible mechanisms behind which biological agents explore their environment and respond to changing conditions.
4/3/2024
Efficient Navigation of a Robotic Fish Swimming Across the Vortical Flow Field
Haodong Feng, Dehan Yuan, Jiale Miao, Jie You, Yue Wang, Yi Zhu, Dixia Fan
0
0
Navigating efficiently across vortical flow fields presents a significant challenge in various robotic applications. The dynamic and unsteady nature of vortical flows often disturbs the control of underwater robots, complicating their operation in hydrodynamic environments. Conventional control methods, which depend on accurate modeling, fail in these settings due to the complexity of fluid-structure interactions (FSI) caused by unsteady hydrodynamics. This study proposes a deep reinforcement learning (DRL) algorithm, trained in a data-driven manner, to enable efficient navigation of a robotic fish swimming across vortical flows. Our proposed algorithm incorporates the LSTM architecture and uses several recent consecutive observations as the state to address the issue of partial observation, often due to sensor limitations. We present a numerical study of navigation within a Karman vortex street, created by placing a stationary cylinder in a uniform flow, utilizing the immersed boundary-lattice Boltzmann method (IB-LBM). The aim is to train the robotic fish to discover efficient navigation policies, enabling it to reach a designated target point across the Karman vortex street from various initial positions. After training, the fish demonstrates the ability to rapidly reach the target from different initial positions, showcasing the effectiveness and robustness of our proposed algorithm. Analysis of the results reveals that the robotic fish can leverage velocity gains and pressure differences induced by the vortices to reach the target, underscoring the potential of our proposed algorithm in enhancing navigation in complex hydrodynamic environments.
5/24/2024

Autonomous navigation of catheters and guidewires in mechanical thrombectomy using inverse reinforcement learning
Harry Robertshaw, Lennart Karstensen, Benjamin Jackson, Alejandro Granados, Thomas C. Booth
0
0
Purpose: Autonomous navigation of catheters and guidewires can enhance endovascular surgery safety and efficacy, reducing procedure times and operator radiation exposure. Integrating tele-operated robotics could widen access to time-sensitive emergency procedures like mechanical thrombectomy (MT). Reinforcement learning (RL) shows potential in endovascular navigation, yet its application encounters challenges without a reward signal. This study explores the viability of autonomous navigation in MT vasculature using inverse RL (IRL) to leverage expert demonstrations. Methods: This study established a simulation-based training and evaluation environment for MT navigation. We used IRL to infer reward functions from expert behaviour when navigating a guidewire and catheter. We utilized soft actor-critic to train models with various reward functions and compared their performance in silico. Results: We demonstrated feasibility of navigation using IRL. When evaluating single versus dual device (i.e. guidewire versus catheter and guidewire) tracking, both methods achieved high success rates of 95% and 96%, respectively. Dual-tracking, however, utilized both devices mimicking an expert. A success rate of 100% and procedure time of 22.6 s were obtained when training with a reward function obtained through reward shaping. This outperformed a dense reward function (96%, 24.9 s) and an IRL-derived reward function (48%, 59.2 s). Conclusions: We have contributed to the advancement of autonomous endovascular intervention navigation, particularly MT, by employing IRL. The results underscore the potential of using reward shaping to train models, offering a promising avenue for enhancing the accessibility and precision of MT. We envisage that future research can extend our methodology to diverse anatomical structures to enhance generalizability.
6/19/2024