PEACE: Prompt Engineering Automation for CLIPSeg Enhancement in Aerial Robotics

0
Sign in to get full access
Overview
- This paper presents PEACE, a system for automating prompt engineering to enhance the performance of the CLIPSeg model for aerial robotics applications.
- It aims to improve the safety and reliability of autonomous drone landing by using CLIP-based segmentation to identify safe landing zones.
- The key contributions include a prompt engineering automation framework and techniques to remove potentially unsafe visual concepts from CLIP-based models.
Plain English Explanation
PEACE: Prompt Engineering Automation for CLIPSeg Enhancement in Aerial Robotics is a research paper that describes a system to make it easier to customize and improve a computer vision model called CLIPSeg. CLIPSeg is used to help drones or other aerial robots identify safe places to land.
The main idea is to create an automated process for finding the right "prompts" or instructions to give to CLIPSeg so that it can better recognize important visual features in aerial images, like safe landing zones. This is important because drones need to be able to reliably and safely land in complex, real-world environments.
The researchers developed techniques to remove potentially unsafe or inappropriate visual concepts from the CLIP model that CLIPSeg is based on. This helps ensure the drone's decisions are based on appropriate and safe information.
Overall, this research aims to make it simpler and more effective to use advanced computer vision for critical aerial robotics applications like safe landing.
Technical Explanation
The paper introduces the PEACE system, which automates the process of engineering prompts to enhance the performance of the CLIPSeg model for aerial robotics tasks.
CLIPSeg is a segmentation model that uses the CLIP vision-language model to identify and segment relevant objects in images. The authors propose an automated prompt engineering framework to customize CLIPSeg for aerial robotics applications, specifically safe landing zone detection.
The key technical contributions include:
- A prompt engineering automation pipeline that iteratively optimizes prompts to improve CLIPSeg performance on aerial datasets.
- Techniques to remove potentially unsafe or inappropriate visual concepts from the CLIP model to ensure the drone's decisions are based on suitable information.
- Experiments demonstrating the effectiveness of PEACE in enhancing CLIPSeg's performance on aerial robotics datasets compared to standard fine-tuning approaches.
The authors show that the PEACE system can significantly boost the segmentation accuracy of CLIPSeg for identifying safe landing zones in aerial imagery, which is critical for autonomous drone landing.
Critical Analysis
The paper presents a well-designed and thorough approach to automating prompt engineering for the CLIPSeg model in the context of aerial robotics. The authors acknowledge several limitations and areas for future work:
- The current PEACE framework is tailored to the specific task of safe landing zone detection, and more research is needed to generalize it to other aerial robotics applications.
- The prompt engineering process relies on having access to representative aerial datasets, which may not always be available, especially for emerging applications.
- While the techniques for removing unsafe visual concepts are effective, there may be other unintended biases or limitations in the underlying CLIP model that are not addressed.
Additional areas for further investigation could include:
- Exploring ways to make the prompt engineering process more robust to dataset shift and domain adaptation challenges.
- Investigating techniques to further improve the safety and reliability of the vision-language models used in critical aerial robotics systems.
- Studying the broader implications and potential societal impact of using these types of automated prompt engineering systems.
Overall, the PEACE system represents an important step forward in enhancing the capabilities of computer vision models for aerial robotics applications, but continued research and careful consideration of the limitations are necessary.
Conclusion
PEACE: Prompt Engineering Automation for CLIPSeg Enhancement in Aerial Robotics presents a novel framework for automating the prompt engineering process to improve the performance of the CLIPSeg model for safe landing zone detection in aerial robotics.
The key contributions include an automated prompt engineering pipeline, techniques to remove unsafe visual concepts, and experimental validation demonstrating significant improvements in segmentation accuracy. This research represents an important step towards making advanced computer vision more accessible and reliable for critical aerial robotics applications.
While the current system has some limitations, the overall approach shows great promise for enhancing the safety and capabilities of autonomous drones and other aerial robots operating in complex, real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
PEACE: Prompt Engineering Automation for CLIPSeg Enhancement in Aerial Robotics
Haechan Mark Bong, Rongge Zhang, Antoine Robillard, Ricardo de Azambuja, Giovanni Beltrame
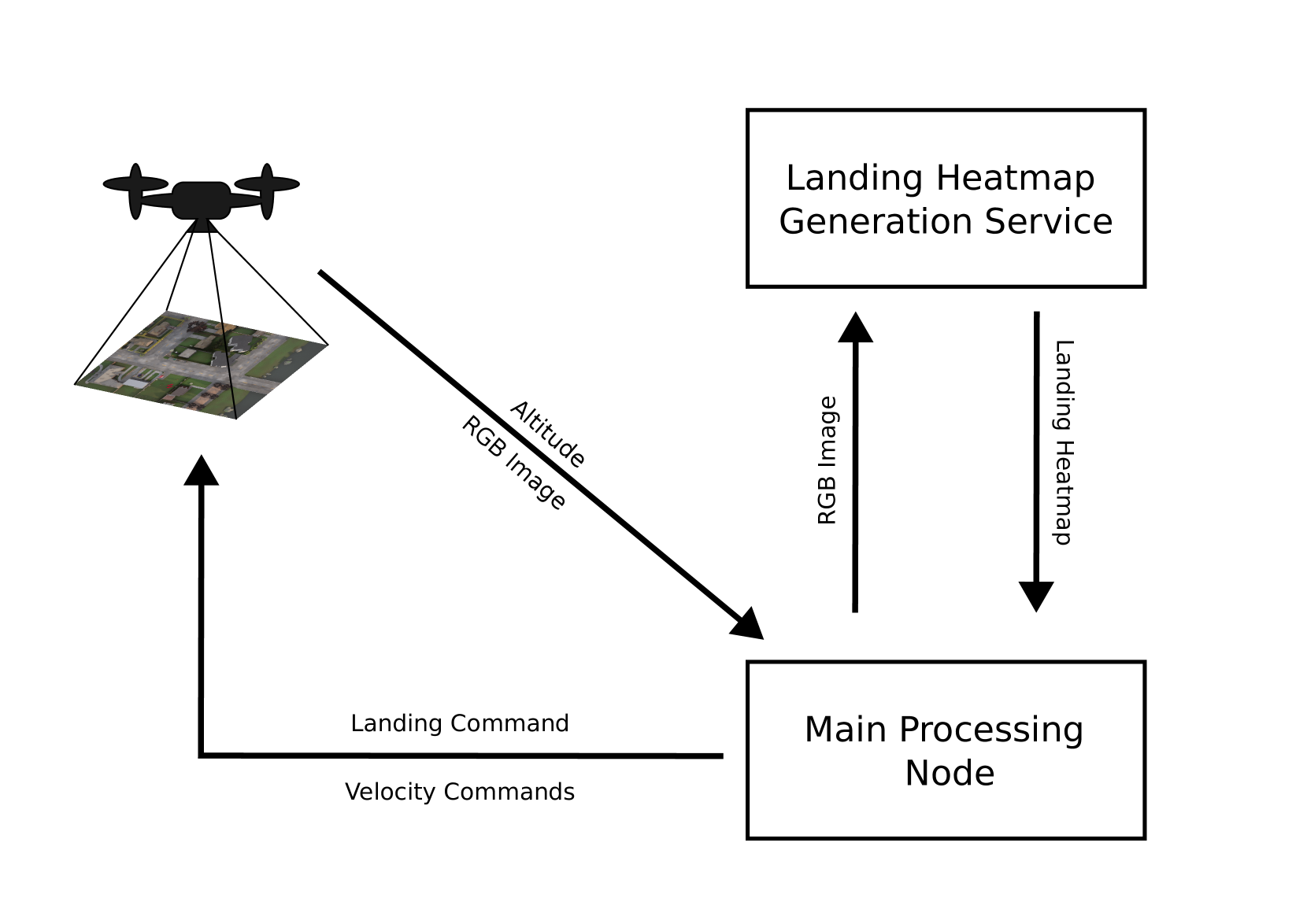
Safe landing is an essential aspect of flight operations in fields ranging from industrial to space robotics. With the growing interest in artificial intelligence, we focus on learning-based methods for safe landing. Our previous work, Dynamic Open-Vocabulary Enhanced SafE-Landing with Intelligence (DOVESEI), demonstrated the feasibility of using prompt-based segmentation for identifying safe landing zones with open vocabulary models. However, relying on a heuristic selection of words for prompts is not reliable, as it cannot adapt to changing environments, potentially leading to harmful outcomes if the observed environment is not accurately represented by the chosen prompt. To address this issue, we introduce PEACE (Prompt Engineering Automation for CLIPSeg Enhancement), an enhancement to DOVESEI that automates prompt engineering to adapt to shifts in data distribution. PEACE can perform safe landings using only monocular cameras and image segmentation. PEACE shows significant improvements in prompt generation and engineering for aerial images compared to standard prompts used for CLIP and CLIPSeg. By combining DOVESEI and PEACE, our system improved the success rate of safe landing zone selection by at least 30% in both simulations and indoor experiments.
Read more9/10/2024
🛠️
0
Dynamic Open Vocabulary Enhanced Safe-landing with Intelligence (DOVESEI)
Haechan Mark Bong, Rongge Zhang, Ricardo de Azambuja, Giovanni Beltrame
This work targets what we consider to be the foundational step for urban airborne robots, a safe landing. Our attention is directed toward what we deem the most crucial aspect of the safe landing perception stack: segmentation. We present a streamlined reactive UAV system that employs visual servoing by harnessing the capabilities of open vocabulary image segmentation. This approach can adapt to various scenarios with minimal adjustments, bypassing the necessity for extensive data accumulation for refining internal models, thanks to its open vocabulary methodology. Given the limitations imposed by local authorities, our primary focus centers on operations originating from altitudes of 100 meters. This choice is deliberate, as numerous preceding works have dealt with altitudes up to 30 meters, aligning with the capabilities of small stereo cameras. Consequently, we leave the remaining 20m to be navigated using conventional 3D path planning methods. Utilizing monocular cameras and image segmentation, our findings demonstrate the system's capability to successfully execute landing maneuvers at altitudes as low as 20 meters. However, this approach is vulnerable to intermittent and occasionally abrupt fluctuations in the segmentation between frames in a video stream. To address this challenge, we enhance the image segmentation output by introducing what we call a dynamic focus: a masking mechanism that self adjusts according to the current landing stage. This dynamic focus guides the control system to avoid regions beyond the drone's safety radius projected onto the ground, thus mitigating the problems with fluctuations. Through the implementation of this supplementary layer, our experiments have reached improvements in the landing success rate of almost tenfold when compared to global segmentation. All the source code is open source and available online (github.com/MISTLab/DOVESEI).
Read more5/7/2024
🤯
0
Embedded light-weight approach for safe landing in populated areas
Tilemahos Mitroudas, Vasiliki Balaska, Athanasios Psomoulis, Antonios Gasteratos
Landing safety is a challenge heavily engaging the research community recently, due to the increasing interest in applications availed by aerial vehicles. In this paper, we propose a landing safety pipeline based on state of the art object detectors and OctoMap. First, a point cloud of surface obstacles is generated, which is then inserted in an OctoMap. The unoccupied areas are identified, thus resulting to a list of safe landing points. Due to the low inference time achieved by state of the art object detectors and the efficient point cloud manipulation using OctoMap, it is feasible for our approach to deploy on low-weight embedded systems. The proposed pipeline has been evaluated in many simulation scenarios, varying in people density, number, and movement. Simulations were executed with an Nvidia Jetson Nano in the loop to confirm the pipeline's performance and robustness in a low computing power hardware. The experiments yielded promising results with a 95% success rate.
Read more4/9/2024
🛸
0
Visual Environment Assessment for Safe Autonomous Quadrotor Landing
Mattia Secchiero, Nishanth Bobbili, Yang Zhou, Giuseppe Loianno
Autonomous identification and evaluation of safe landing zones are of paramount importance for ensuring the safety and effectiveness of aerial robots in the event of system failures, low battery, or the successful completion of specific tasks. In this paper, we present a novel approach for detection and assessment of potential landing sites for safe quadrotor landing. Our solution efficiently integrates 2D and 3D environmental information, eliminating the need for external aids such as GPS and computationally intensive elevation maps. The proposed pipeline combines semantic data derived from a Neural Network (NN), to extract environmental features, with geometric data obtained from a disparity map, to extract critical geometric attributes such as slope, flatness, and roughness. We define several cost metrics based on these attributes to evaluate safety, stability, and suitability of regions in the environments and identify the most suitable landing area. Our approach runs in real-time on quadrotors equipped with limited computational capabilities. Experimental results conducted in diverse environments demonstrate that the proposed method can effectively assess and identify suitable landing areas, enabling the safe and autonomous landing of a quadrotor.
Read more5/6/2024