Perfecting Periodic Trajectory Tracking: Model Predictive Control with a Periodic Observer ($Pi$-MPC)
2404.01550
0
0

Abstract
In Model Predictive Control (MPC), discrepancies between the actual system and the predictive model can lead to substantial tracking errors and significantly degrade performance and reliability. While such discrepancies can be alleviated with more complex models, this often complicates controller design and implementation. By leveraging the fact that many trajectories of interest are periodic, we show that perfect tracking is possible when incorporating a simple observer that estimates and compensates for periodic disturbances. We present the design of the observer and the accompanying tracking MPC scheme, proving that their combination achieves zero tracking error asymptotically, regardless of the complexity of the unmodelled dynamics. We validate the effectiveness of our method, demonstrating asymptotically perfect tracking on a high-dimensional soft robot with nearly 10,000 states and a fivefold reduction in tracking errors compared to a baseline MPC on small-scale autonomous race car experiments.
Create account to get full access
Overview
- This paper presents a new control method called "Periodic Model Predictive Control with a Periodic Observer" (Π-MPC) for precisely tracking periodic trajectories.
- The method uses a periodic observer to estimate the system state and disturbances, and then applies model predictive control to generate optimal control inputs.
- Experiments on a robotic manipulator show the Π-MPC approach outperforms traditional MPC in tracking periodic reference trajectories.
Plain English Explanation
The paper introduces a new way to precisely control systems that need to follow repeating, or "periodic," paths or motions. Many real-world systems, like robot arms or vehicle suspensions, are designed to move in a periodic fashion. Precisely tracking these periodic trajectories is important for performance and efficiency.
Traditional model predictive control (MPC) methods work well for general motion control, but can struggle with periodic references. The key innovation in this paper is the use of a "periodic observer" - a mathematical model that can estimate the current state of the system and any external disturbances, even if they also repeat periodically.
By combining this periodic observer with model predictive control, the new Π-MPC approach is able to more accurately predict the future state of the system and compute optimal control inputs to perfectly follow the desired periodic trajectory. Imagine a robot arm needing to repeatedly trace out a complex shape - the periodic observer helps the controller anticipate and compensate for any small deviations or external forces that try to push the arm off course.
Technical Explanation
The paper formulates the periodic trajectory tracking problem and proposes the Π-MPC control architecture to address it. Π-MPC consists of two main components:
-
A periodic state and disturbance observer: This observer uses a linear time-periodic model of the system dynamics to estimate the current state and any periodic disturbances acting on the system. Unlike a standard observer, it can accurately track periodic signals.
-
A model predictive controller: The MPC component uses the state and disturbance estimates from the periodic observer to predict the future system response. It then computes the optimal control inputs to drive the system along the desired periodic reference trajectory, while accounting for input/state constraints.
The authors validate the Π-MPC approach through experiments on a 2-DOF robotic manipulator. They show Π-MPC outperforms a standard MPC controller in terms of trajectory tracking accuracy, especially for high-frequency periodic reference signals.
Critical Analysis
The paper provides a thorough mathematical formulation of the Π-MPC control approach and demonstrates its effectiveness through experiments. However, a few potential limitations are worth noting:
- The analysis is limited to linear time-periodic systems. Extending the periodic observer and MPC formulation to handle nonlinear dynamics could broaden the applicability.
- The experimental validation is confined to a single robotic manipulator testbed. Evaluating Π-MPC on a wider range of systems, including higher-dimensional or more complex periodic motion tasks, would strengthen the claims.
- The paper does not address how to design the periodic reference trajectory in the first place. Integrating Π-MPC with trajectory planning algorithms could enhance the overall control framework.
Overall, the Π-MPC approach appears to be a promising new technique for precision periodic trajectory tracking. Further research exploring these potential extensions and real-world applications would be valuable contributions to the field of advanced motion control.
Conclusion
This paper presents a novel Periodic Model Predictive Control with a Periodic Observer (Π-MPC) method for precisely tracking periodic reference trajectories. By incorporating a periodic state and disturbance observer, Π-MPC is able to outperform standard MPC in accurately following high-frequency periodic motions, as demonstrated on a robotic manipulator.
The Π-MPC framework represents an important advancement in motion control, with potential applications in robotics, manufacturing, vehicle suspensions, and other systems requiring tight tracking of repetitive trajectories. Further research to expand the approach and evaluate it on additional real-world systems could unlock new capabilities for precision periodic control.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
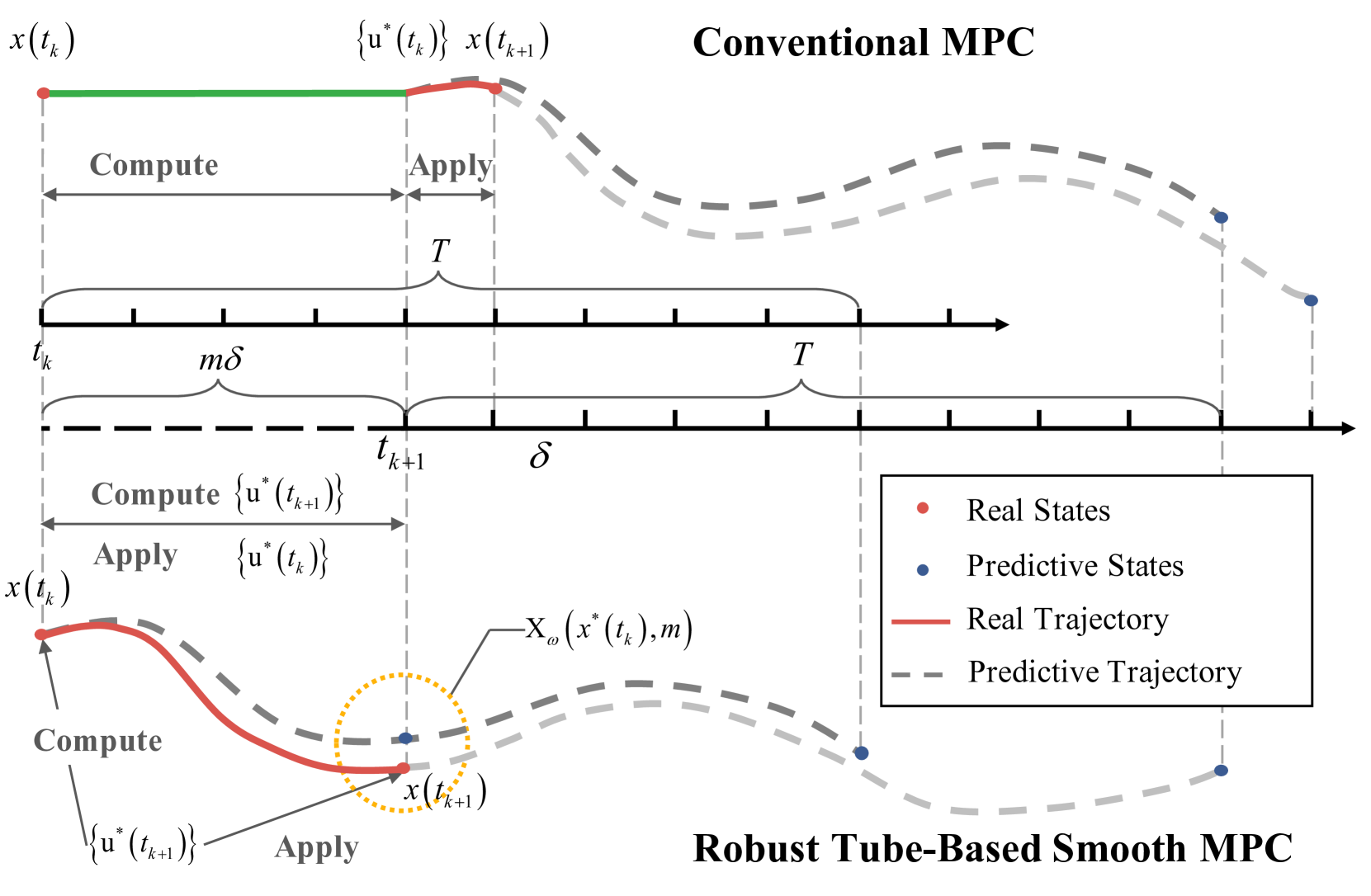
Smooth Computation without Input Delay: Robust Tube-Based Model Predictive Control for Robot Manipulator Planning
Yu Luo, Qie Sima, Tianying Ji, Fuchun Sun, Huaping Liu, Jianwei Zhang
0
0
Model Predictive Control (MPC) has exhibited remarkable capabilities in optimizing objectives and meeting constraints. However, the substantial computational burden associated with solving the Optimal Control Problem (OCP) at each triggering instant introduces significant delays between state sampling and control application. These delays limit the practicality of MPC in resource-constrained systems when engaging in complex tasks. The intuition to address this issue in this paper is that by predicting the successor state, the controller can solve the OCP one time step ahead of time thus avoiding the delay of the next action. To this end, we compute deviations between real and nominal system states, predicting forthcoming real states as initial conditions for the imminent OCP solution. Anticipatory computation stores optimal control based on current nominal states, thus mitigating the delay effects. Additionally, we establish an upper bound for linearization error, effectively linearizing the nonlinear system, reducing OCP complexity, and enhancing response speed. We provide empirical validation through two numerical simulations and corresponding real-world robot tasks, demonstrating significant performance improvements and augmented response speed (up to $90%$) resulting from the seamless integration of our proposed approach compared to conventional time-triggered MPC strategies.
5/9/2024

A Tutorial on Gaussian Process Learning-based Model Predictive Control
Jie Wang, Youmin Zhang
0
0
This tutorial provides a systematic introduction to Gaussian process learning-based model predictive control (GP-MPC), an advanced approach integrating Gaussian process (GP) with model predictive control (MPC) for enhanced control in complex systems. It begins with GP regression fundamentals, illustrating how it enriches MPC with enhanced predictive accuracy and robust handling of uncertainties. A central contribution of this tutorial is the first detailed, systematic mathematical formulation of GP-MPC in literature, focusing on deriving the approximation of means and variances propagation for GP multi-step predictions. Practical applications in robotics control, such as path-following for mobile robots in challenging terrains and mixed-vehicle platooning, are discussed to demonstrate the real-world effectiveness and adaptability of GP-MPC. This tutorial aims to make GP-MPC accessible to researchers and practitioners, enriching the learning-based control field with in-depth theoretical and practical insights and fostering further innovations in complex system control.
4/8/2024
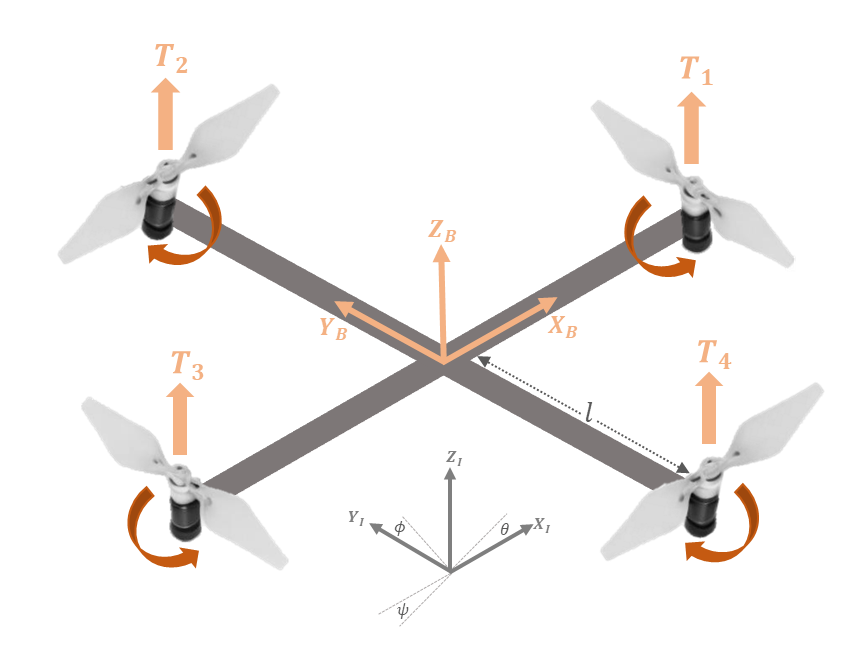
Multi-Model Predictive Attitude Control of Quadrotors
Mohammadreza Izadi, Zeinab Shayan, Reza Faieghi
0
0
This paper introduces a new multi-model predictive control (MMPC) method for quadrotor attitude control with performance nearly on par with nonlinear model predictive control (NMPC) and computational efficiency similar to linear model predictive control (LMPC). Conventional NMPC, while effective, is computationally intensive, especially for attitude control that needs a high refresh rate. Conversely, LMPC offers computational advantages but suffers from poor performance and local stability. Our approach relies on multiple linear models of attitude dynamics, each accompanied by a linear model predictive controller, dynamically switching between them given flight conditions. We leverage gap metric analysis to minimize the number of models required to accurately predict the vehicle behavior in various conditions and incorporate a soft switching mechanism to ensure system stability during controller transitions. Our results show that with just 15 models, the vehicle attitude can be accurately controlled across various set points. Comparative evaluations with existing controllers such as incremental nonlinear dynamic inversion, sliding mode control, LMPC, and NMPC reveal that our approach closely matches the effectiveness of NMPC, outperforming other methods, with a running time comparable to LMPC.
6/26/2024
🤿
TinyMPC: Model-Predictive Control on Resource-Constrained Microcontrollers
Khai Nguyen, Sam Schoedel, Anoushka Alavilli, Brian Plancher, Zachary Manchester
0
0
Model-predictive control (MPC) is a powerful tool for controlling highly dynamic robotic systems subject to complex constraints. However, MPC is computationally demanding, and is often impractical to implement on small, resource-constrained robotic platforms. We present TinyMPC, a high-speed MPC solver with a low memory footprint targeting the microcontrollers common on small robots. Our approach is based on the alternating direction method of multipliers (ADMM) and leverages the structure of the MPC problem for efficiency. We demonstrate TinyMPC's effectiveness by benchmarking against the state-of-the-art solver OSQP, achieving nearly an order of magnitude speed increase, as well as through hardware experiments on a 27 gram quadrotor, demonstrating high-speed trajectory tracking and dynamic obstacle avoidance. TinyMPC is publicly available at https://tinympc.org.
5/9/2024