Smooth Computation without Input Delay: Robust Tube-Based Model Predictive Control for Robot Manipulator Planning
2403.01265
0
0
Abstract
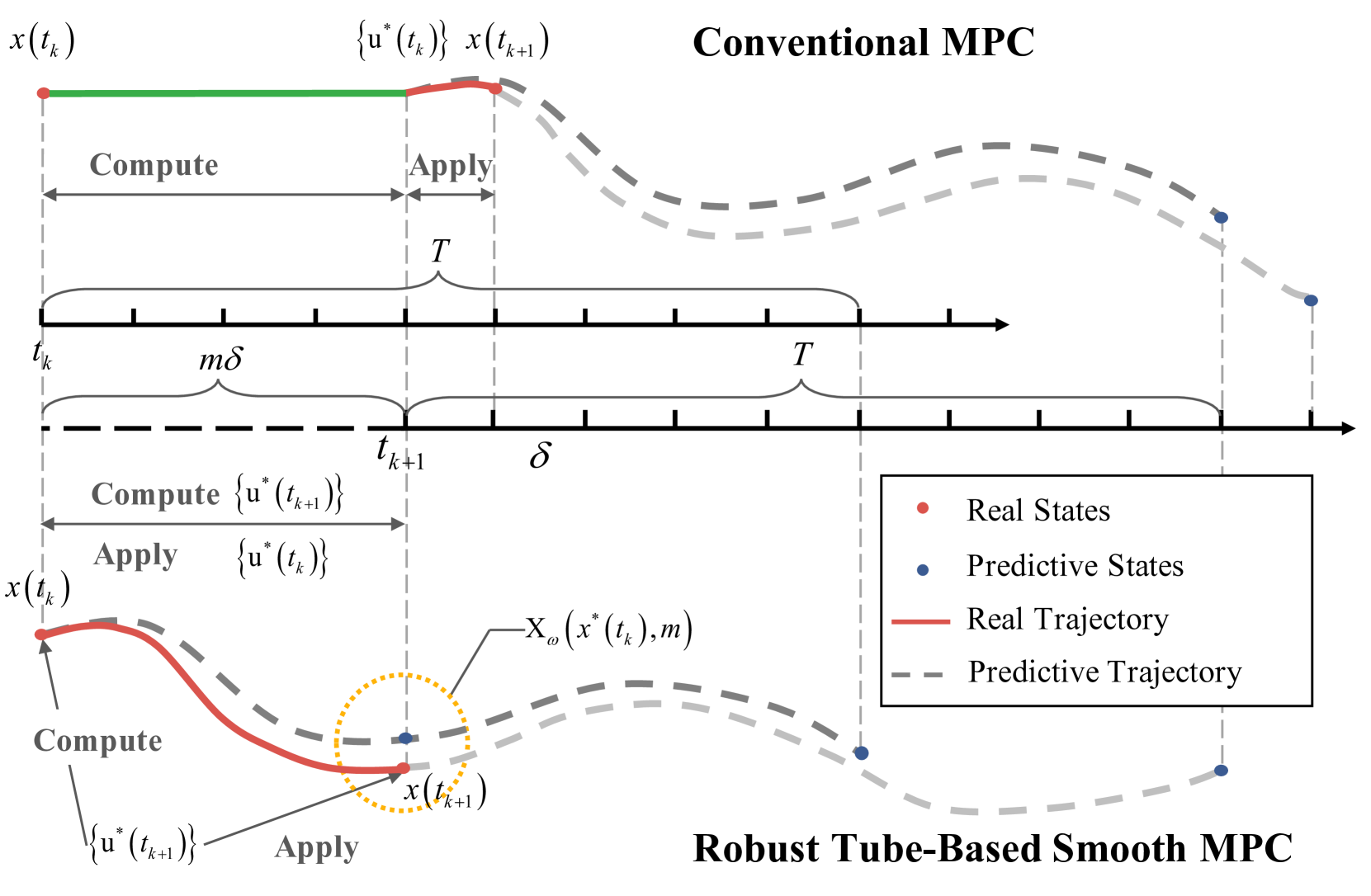
Model Predictive Control (MPC) has exhibited remarkable capabilities in optimizing objectives and meeting constraints. However, the substantial computational burden associated with solving the Optimal Control Problem (OCP) at each triggering instant introduces significant delays between state sampling and control application. These delays limit the practicality of MPC in resource-constrained systems when engaging in complex tasks. The intuition to address this issue in this paper is that by predicting the successor state, the controller can solve the OCP one time step ahead of time thus avoiding the delay of the next action. To this end, we compute deviations between real and nominal system states, predicting forthcoming real states as initial conditions for the imminent OCP solution. Anticipatory computation stores optimal control based on current nominal states, thus mitigating the delay effects. Additionally, we establish an upper bound for linearization error, effectively linearizing the nonlinear system, reducing OCP complexity, and enhancing response speed. We provide empirical validation through two numerical simulations and corresponding real-world robot tasks, demonstrating significant performance improvements and augmented response speed (up to $90%$) resulting from the seamless integration of our proposed approach compared to conventional time-triggered MPC strategies.
Create account to get full access
Overview
- Presents a robust tube-based model predictive control (MPC) approach for robot manipulator planning
- Aims to achieve smooth computation without input delay, which is crucial for real-time robot control
- Leverages piecewise linearization to handle nonlinear dynamics and a tube-based mechanism to ensure robust performance
Plain English Explanation
This research paper introduces a new control method for robot manipulators that helps achieve smooth and responsive motion planning. The key idea is to use a robust tube-based model predictive control approach, which can handle the complex nonlinear dynamics of robot arms.
The method works by breaking down the robot's motion into a series of linear approximations, or "pieces," and then using an optimization process to plan the robot's path. This piecewise linearization helps the controller adapt to the robot's changing behavior as it moves. Additionally, the tube-based mechanism ensures the robot stays within a safe "tube" of acceptable positions, even if there are disturbances or uncertainties in the system.
By using this advanced control technique, the researchers were able to enable smooth, responsive control of the robot manipulator without introducing delays in the input commands. This is crucial for real-time applications where the robot needs to react quickly and precisely to its environment, such as in manufacturing, surgery, or other robotic applications.
Technical Explanation
The paper proposes a tube-based model predictive control (MPC) approach for robot manipulator planning that can achieve smooth computation without input delay. The key technical elements include:
-
Piecewise Linearization: The nonlinear robot dynamics are approximated using a piecewise linear model, which allows the controller to adapt to changes in the robot's behavior over the prediction horizon.
-
Tube-based Mechanism: A tube-based robust MPC framework is employed to ensure the robot's trajectory remains within a safe "tube" of acceptable states, even in the presence of disturbances or uncertainties.
-
Optimization-based Planning: An optimization-based planning process is used to determine the optimal control inputs that drive the robot along the desired trajectory while satisfying operational constraints.
The researchers demonstrate the effectiveness of their approach through simulations and experiments on a 6-DOF robot manipulator. They show that their method can achieve smooth, responsive control without introducing input delays, which is crucial for real-time applications like robot control and motion planning.
Critical Analysis
The paper presents a well-designed and technically sound approach for robot manipulator planning. The use of piecewise linearization and the tube-based robust MPC framework are well-justified and effectively implemented. The simulation and experimental results demonstrate the ability of the proposed method to achieve smooth computation without input delay, which is a significant advantage for real-time robot control applications.
However, the paper does not address the computational complexity of the optimization-based planning process, which could be a concern for resource-constrained systems. Additionally, the researchers do not provide a comprehensive analysis of the method's performance under various types of disturbances or uncertainties, which could be valuable for understanding the robustness of the approach.
Further research could explore ways to reduce the computational burden of the optimization-based planning, potentially through the use of learning-based techniques or other strategies. Additionally, a more in-depth analysis of the method's robustness to different types of disturbances and uncertainties would help strengthen the claims made in the paper.
Conclusion
This research paper presents a novel tube-based model predictive control approach for smooth and responsive robot manipulator planning. The key innovations include the use of piecewise linearization to handle nonlinear dynamics and a tube-based mechanism to ensure robust performance in the face of disturbances and uncertainties.
The proposed method demonstrates the ability to achieve smooth computation without input delay, which is a crucial requirement for real-time robot control applications. The simulation and experimental results validate the effectiveness of the approach, making it a promising contribution to the field of robot motion planning and control.
While the paper has some limitations in terms of computational complexity and robustness analysis, the overall approach represents an important step forward in developing advanced control techniques for modern robotic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Perfecting Periodic Trajectory Tracking: Model Predictive Control with a Periodic Observer ($Pi$-MPC)
Luis Pabon, Johannes Kohler, John Irvin Alora, Patrick Benito Eberhard, Andrea Carron, Melanie N. Zeilinger, Marco Pavone
0
0
In Model Predictive Control (MPC), discrepancies between the actual system and the predictive model can lead to substantial tracking errors and significantly degrade performance and reliability. While such discrepancies can be alleviated with more complex models, this often complicates controller design and implementation. By leveraging the fact that many trajectories of interest are periodic, we show that perfect tracking is possible when incorporating a simple observer that estimates and compensates for periodic disturbances. We present the design of the observer and the accompanying tracking MPC scheme, proving that their combination achieves zero tracking error asymptotically, regardless of the complexity of the unmodelled dynamics. We validate the effectiveness of our method, demonstrating asymptotically perfect tracking on a high-dimensional soft robot with nearly 10,000 states and a fivefold reduction in tracking errors compared to a baseline MPC on small-scale autonomous race car experiments.
4/3/2024
🤿
Robust Adaptive MPC Using Uncertainty Compensation
Ran Tao, Pan Zhao, Ilya Kolmanovsky, Naira Hovakimyan
0
0
This paper presents an uncertainty compensation-based robust adaptive model predictive control (MPC) framework for linear systems with both matched and unmatched nonlinear uncertainties subject to both state and input constraints. In particular, the proposed control framework leverages an L1 adaptive controller (L1AC) to compensate for the matched uncertainties and to provide guaranteed uniform bounds on the error between the states and control inputs of the actual system and those of a nominal i.e., uncertainty-free, system. The performance bounds provided by the L1AC are then used to tighten the state and control constraints of the actual system, and a model predictive controller is designed for the nominal system with the tightened constraints. The proposed control framework, which we denote as uncertainty compensation-based MPC (UC-MPC), guarantees constraint satisfaction and achieves improved performance compared with existing methods. Simulation results on a flight control example demonstrate the benefits of the proposed framework.
4/4/2024
Efficient model predictive control for nonlinear systems modelled by deep neural networks
Jianglin Lan
0
0
This paper presents a model predictive control (MPC) for dynamic systems whose nonlinearity and uncertainty are modelled by deep neural networks (NNs), under input and state constraints. Since the NN output contains a high-order complex nonlinearity of the system state and control input, the MPC problem is nonlinear and challenging to solve for real-time control. This paper proposes two types of methods for solving the MPC problem: the mixed integer programming (MIP) method which produces an exact solution to the nonlinear MPC, and linear relaxation (LR) methods which generally give suboptimal solutions but are much computationally cheaper. Extensive numerical simulation for an inverted pendulum system modelled by ReLU NNs of various sizes is used to demonstrate and compare performance of the MIP and LR methods.
5/20/2024
📈
Towards Using Fast Embedded Model Predictive Control for Human-Aware Predictive Robot Navigation
Till Hielscher, Lukas Heuer, Frederik Wulle, Luigi Palmieri
0
0
Predictive planning is a key capability for robots to efficiently and safely navigate populated environments. Particularly in densely crowded scenes, with uncertain human motion predictions, predictive path planning, and control can become expensive to compute in real time due to the curse of dimensionality. With the goal of achieving pro-active and legible robot motion in shared environments, in this paper we present HuMAN-MPC, a computationally efficient algorithm for Human Motion Aware Navigation using fast embedded Model Predictive Control. The approach consists of a novel model predictive control (MPC) formulation that leverages a fast state-of-the-art optimization backend based on a sequential quadratic programming real-time iteration scheme while also providing feasibility monitoring. Our experiments, in simulation and on a fully integrated ROS-based platform, show that the approach achieves great scalability with fast computation times without penalizing path quality and efficiency of the resulting avoidance behavior.
5/22/2024