Performance Evaluation of Deep Learning-based Quadrotor UAV Detection and Tracking Methods

0

Sign in to get full access
Overview
- This paper evaluates the performance of deep learning-based methods for detecting and tracking quadrotor unmanned aerial vehicles (UAVs).
- The research was conducted by a team from King Fahd University for Petroleum and Minerals in Saudi Arabia.
- The paper compares the accuracy and efficiency of different deep learning models for UAV detection and tracking.
Plain English Explanation
Quadrotor UAVs, or drones, are becoming increasingly common for various applications like aerial photography, delivery, and surveillance. Deep learning is a powerful technique that can be used to automatically detect and track these drones in real-time.
This paper looks at how well different deep learning models perform at this task. The researchers tested several state-of-the-art deep learning models on a dataset of drone footage, measuring factors like how accurately the models could locate and identify the drones, as well as how quickly they could process the video.
By comparing the strengths and weaknesses of these deep learning methods, the researchers aim to provide guidance on which approaches work best for drone detection and tracking applications. This can help developers build more reliable and effective drone monitoring systems.
Technical Explanation
The paper evaluates the performance of several deep learning-based object detection and tracking algorithms for quadrotor UAV applications. The researchers tested models like YOLO, Faster R-CNN, and EfficientDet on a custom dataset of drone footage.
They measured the models' accuracy using standard metrics like precision, recall, and F1-score. The team also looked at the inference time and computational cost of each approach to assess their efficiency for real-time drone monitoring.
The results showed that the YOLO-based models generally had the best trade-off between accuracy and speed, making them well-suited for practical drone detection and tracking systems. The team also found that data augmentation techniques and transfer learning could further boost the models' performance.
Critical Analysis
The paper provides a thorough and systematic evaluation of deep learning-based UAV detection and tracking methods. However, the dataset used was relatively small and may not capture the full diversity of drone environments and appearances.
Additionally, the paper does not extensively discuss potential limitations or failure modes of the deep learning approaches. For example, the models may struggle with identifying small or distant drones, or have difficulty in complex cluttered environments.
Further research could explore ways to improve the robustness and generalization of these deep learning techniques, such as by incorporating additional sensor modalities (e.g. thermal, radar) or developing specialized architectures for drone-specific applications.
Conclusion
This paper provides a valuable performance evaluation of state-of-the-art deep learning models for quadrotor UAV detection and tracking. The results suggest that YOLO-based approaches offer an effective balance of accuracy and efficiency, making them promising candidates for real-world drone monitoring systems.
While the research demonstrates the potential of deep learning in this domain, continued advancements in areas like dataset diversity, model robustness, and multi-sensor fusion could further enhance the capabilities of AI-powered drone surveillance and safety systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Performance Evaluation of Deep Learning-based Quadrotor UAV Detection and Tracking Methods
Mohssen E. Elshaar, Zeyad M. Manaa, Mohammed R. Elbalshy, Abdul Jabbar Siddiqui, Ayman M. Abdallah
Unmanned Aerial Vehicles (UAVs) are becoming more popular in various sectors, offering many benefits, yet introducing significant challenges to privacy and safety. This paper investigates state-of-the-art solutions for detecting and tracking quadrotor UAVs to address these concerns. Cutting-edge deep learning models, specifically the YOLOv5 and YOLOv8 series, are evaluated for their performance in identifying UAVs accurately and quickly. Additionally, robust tracking systems, BoT-SORT and Byte Track, are integrated to ensure reliable monitoring even under challenging conditions. Our tests on the DUT dataset reveal that while YOLOv5 models generally outperform YOLOv8 in detection accuracy, the YOLOv8 models excel in recognizing less distinct objects, demonstrating their adaptability and advanced capabilities. Furthermore, BoT-SORT demonstrated superior performance over Byte Track, achieving higher IoU and lower center error in most cases, indicating more accurate and stable tracking. Code: https://github.com/zmanaa/UAV_detection_and_tracking Tracking demo: https://drive.google.com/file/d/1pe6HC5kQrgTbA2QrjvMN-yjaZyWeAvDT/view?usp=sharing
Read more10/2/2024

0
Drone-type-Set: Drone types detection benchmark for drone detection and tracking
Kholoud AlDosari, AIbtisam Osman, Omar Elharrouss, Somaya AlMaadeed, Mohamed Zied Chaari
The Unmanned Aerial Vehicles (UAVs) market has been significantly growing and Considering the availability of drones at low-cost prices the possibility of misusing them, for illegal purposes such as drug trafficking, spying, and terrorist attacks posing high risks to national security, is rising. Therefore, detecting and tracking unauthorized drones to prevent future attacks that threaten lives, facilities, and security, become a necessity. Drone detection can be performed using different sensors, while image-based detection is one of them due to the development of artificial intelligence techniques. However, knowing unauthorized drone types is one of the challenges due to the lack of drone types datasets. For that, in this paper, we provide a dataset of various drones as well as a comparison of recognized object detection models on the proposed dataset including YOLO algorithms with their different versions, like, v3, v4, and v5 along with the Detectronv2. The experimental results of different models are provided along with a description of each method. The collected dataset can be found in https://drive.google.com/drive/folders/1EPOpqlF4vG7hp4MYnfAecVOsdQ2JwBEd?usp=share_link
Read more5/20/2024
🔎
0
Real-Time Flying Object Detection with YOLOv8
Dillon Reis, Jordan Kupec, Jacqueline Hong, Ahmad Daoudi
This paper presents a generalized model for real-time detection of flying objects that can be used for transfer learning and further research, as well as a refined model that achieves state-of-the-art results for flying object detection. We achieve this by training our first (generalized) model on a data set containing 40 different classes of flying objects, forcing the model to extract abstract feature representations. We then perform transfer learning with these learned parameters on a data set more representative of real world environments (i.e. higher frequency of occlusion, very small spatial sizes, rotations, etc.) to generate our refined model. Object detection of flying objects remains challenging due to large variances of object spatial sizes/aspect ratios, rate of speed, occlusion, and clustered backgrounds. To address some of the presented challenges while simultaneously maximizing performance, we utilize the current state-of-the-art single-shot detector, YOLOv8, in an attempt to find the best trade-off between inference speed and mean average precision (mAP). While YOLOv8 is being regarded as the new state-of-the-art, an official paper has not been released as of yet. Thus, we provide an in-depth explanation of the new architecture and functionality that YOLOv8 has adapted. Our final generalized model achieves a mAP50 of 79.2%, mAP50-95 of 68.5%, and an average inference speed of 50 frames per second (fps) on 1080p videos. Our final refined model maintains this inference speed and achieves an improved mAP50 of 99.1% and mAP50-95 of 83.5%
Read more5/24/2024
0
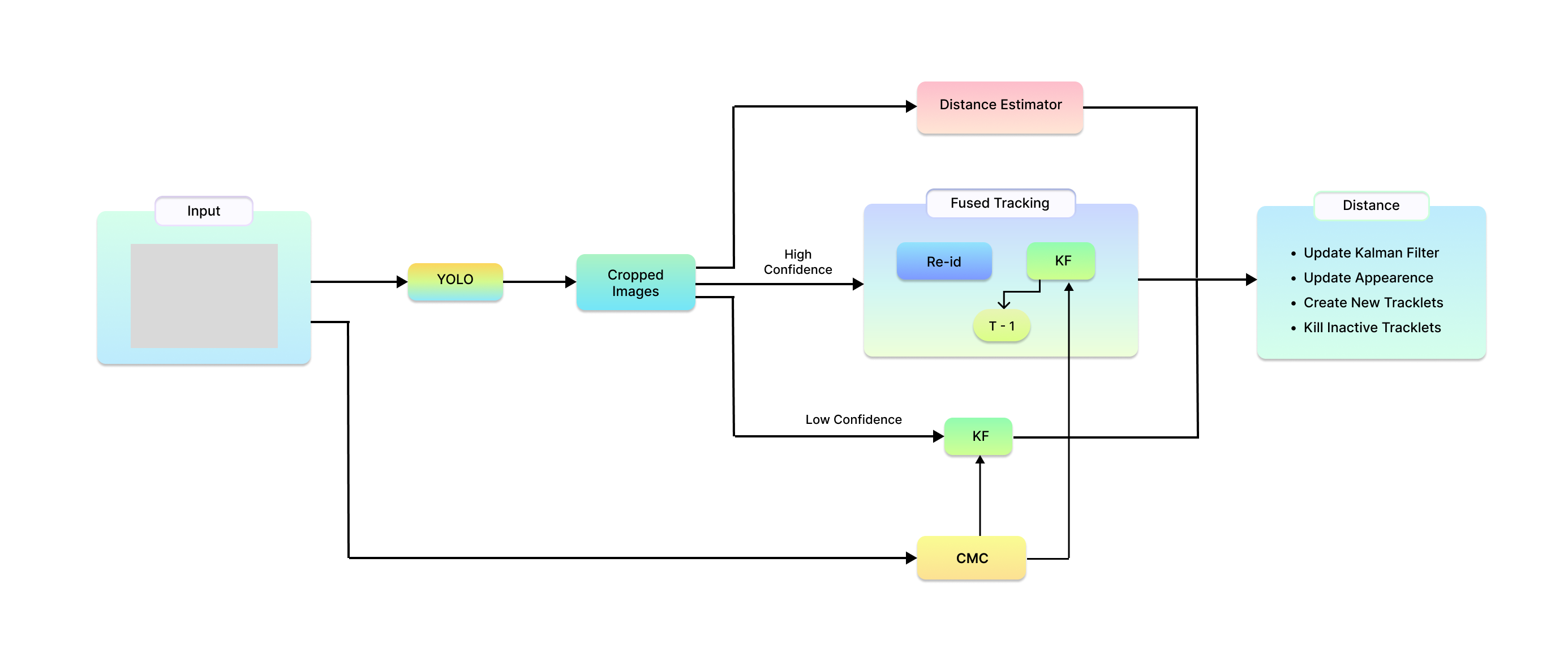
Ensuring UAV Safety: A Vision-only and Real-time Framework for Collision Avoidance Through Object Detection, Tracking, and Distance Estimation
Vasileios Karampinis, Anastasios Arsenos, Orfeas Filippopoulos, Evangelos Petrongonas, Christos Skliros, Dimitrios Kollias, Stefanos Kollias, Athanasios Voulodimos
In the last twenty years, unmanned aerial vehicles (UAVs) have garnered growing interest due to their expanding applications in both military and civilian domains. Detecting non-cooperative aerial vehicles with efficiency and estimating collisions accurately are pivotal for achieving fully autonomous aircraft and facilitating Advanced Air Mobility (AAM). This paper presents a deep-learning framework that utilizes optical sensors for the detection, tracking, and distance estimation of non-cooperative aerial vehicles. In implementing this comprehensive sensing framework, the availability of depth information is essential for enabling autonomous aerial vehicles to perceive and navigate around obstacles. In this work, we propose a method for estimating the distance information of a detected aerial object in real time using only the input of a monocular camera. In order to train our deep learning components for the object detection, tracking and depth estimation tasks we utilize the Amazon Airborne Object Tracking (AOT) Dataset. In contrast to previous approaches that integrate the depth estimation module into the object detector, our method formulates the problem as image-to-image translation. We employ a separate lightweight encoder-decoder network for efficient and robust depth estimation. In a nutshell, the object detection module identifies and localizes obstacles, conveying this information to both the tracking module for monitoring obstacle movement and the depth estimation module for calculating distances. Our approach is evaluated on the Airborne Object Tracking (AOT) dataset which is the largest (to the best of our knowledge) air-to-air airborne object dataset.
Read more5/17/2024