Physically Consistent Online Inertial Adaptation for Humanoid Loco-manipulation
2405.07901
0
0
🔗
Abstract
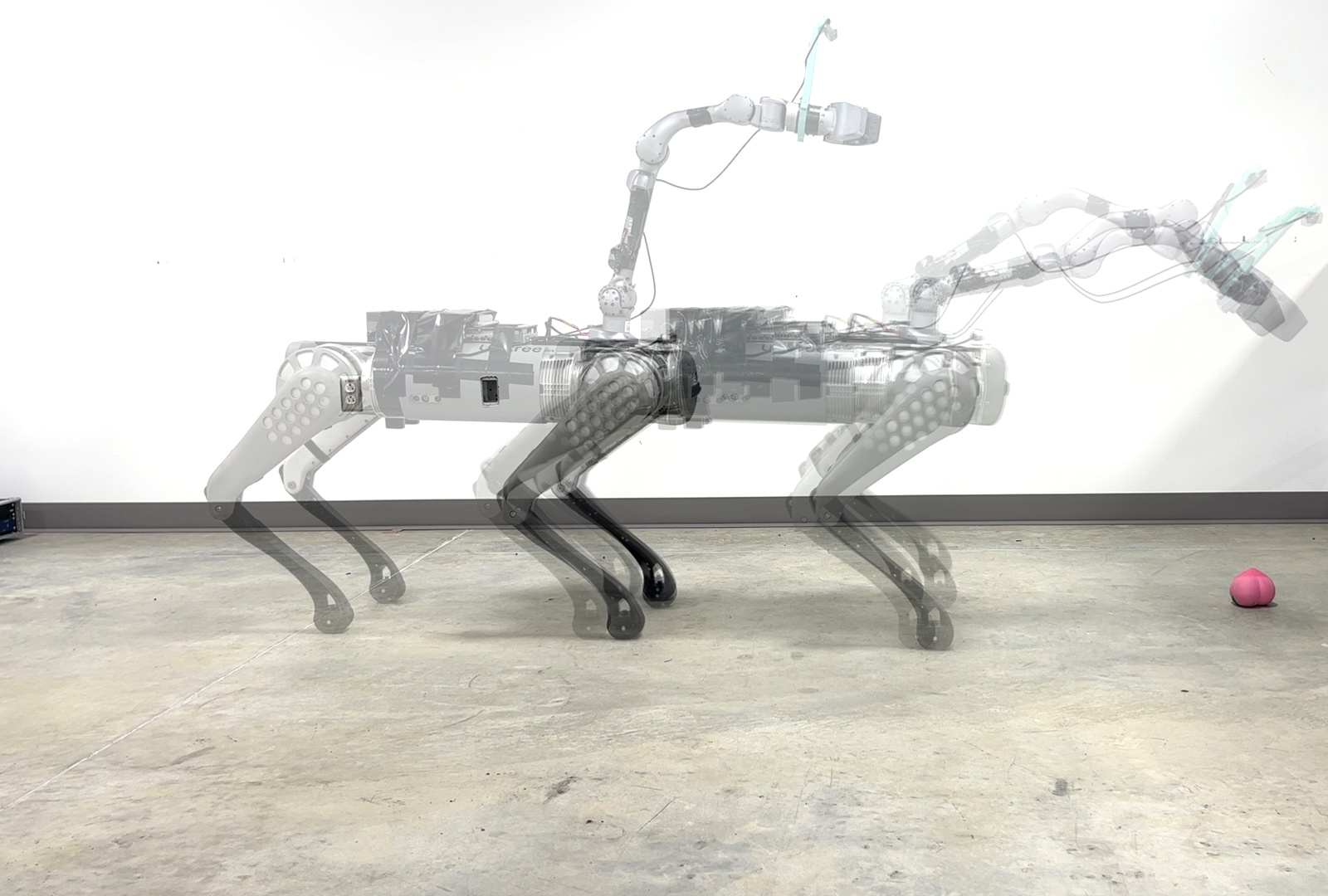
The ability to accomplish manipulation and locomotion tasks in the presence of significant time-varying external loads is a remarkable skill of humans that has yet to be replicated convincingly by humanoid robots. Such an ability will be a key requirement in the environments we envision deploying our robots: dull, dirty, and dangerous. External loads constitute a large model bias, which is typically unaccounted for. In this work, we enable our humanoid robot to engage in loco-manipulation tasks in the presence of significant model bias due to external loads. We propose an online estimation and control framework involving the combination of a physically consistent extended Kalman filter for inertial parameter estimation coupled to a whole-body controller. We showcase our results both in simulation and in hardware, where weights are mounted on Nadia's wrist links as a proxy for engaging in tasks where large external loads are applied to the robot.
Create account to get full access
Overview
- Humanoid robots have yet to match the remarkable ability of humans to accomplish manipulation and locomotion tasks in the presence of significant time-varying external loads.
- External loads can introduce large model biases that are typically unaccounted for, making it challenging for robots to operate in real-world environments.
- This paper presents a framework that enables a humanoid robot to engage in loco-manipulation tasks despite significant model bias due to external loads.
Plain English Explanation
The paper describes a way to help humanoid robots better handle carrying and moving around heavy objects, which is a skill that humans are remarkably good at but has been difficult for robots to replicate. Humans can easily adjust to unexpected changes in the weight or forces they're dealing with, but robots often have a hard time accounting for these external factors.
The researchers developed a system that allows their humanoid robot, named Nadia, to perform tasks involving both movement and manipulation (called "loco-manipulation") even when there are significant external loads or forces acting on the robot. This is important because robots will need to be able to handle these kinds of real-world conditions when doing tasks in dull, dirty, or dangerous environments.
The key innovations are an online estimation system that can quickly identify changes in the robot's inertial parameters (how it moves and is affected by forces) due to external loads, and a whole-body controller that can adjust the robot's movements accordingly. The researchers tested this system in both simulations and with physical experiments where weights were attached to the robot's wrists to mimic the effects of handling heavy objects.
Technical Explanation
The authors propose an online estimation and control framework to enable a humanoid robot to perform loco-manipulation tasks in the presence of significant model bias due to external loads. The framework involves the combination of a physically consistent extended Kalman filter for inertial parameter estimation coupled to a whole-body controller.
The extended Kalman filter is used to continuously estimate changes in the robot's inertial parameters, such as mass and center of mass, as a result of external loads being applied. This allows the system to account for the model bias introduced by the external loads.
The estimated parameters are then used by the whole-body controller to generate appropriate joint torques and motions to accomplish the loco-manipulation tasks. The controller is designed to take the updated inertial parameters into account, enabling the robot to adapt its behavior to the changing external conditions.
The authors evaluate their approach both in simulation and with physical experiments on the Nadia humanoid robot. In the experiments, weights are mounted on the robot's wrist links to mimic the effects of handling large external loads. The results demonstrate the ability of the proposed framework to enable robust loco-manipulation capabilities in the presence of significant model bias.
Critical Analysis
The paper presents a compelling approach to enabling humanoid robots to handle external loads during loco-manipulation tasks, which is an important capability for robots operating in real-world environments. The online estimation and control framework seems well-designed and the experimental results are convincing.
However, the paper does not address the potential limitations of this approach, such as the computational cost of the extended Kalman filter or the sensitivity of the system to noise and measurement errors. Additionally, the experiments were limited to a specific scenario with weights attached to the wrists, and it's unclear how the system would perform with more complex or varying external loads.
Further research could explore the scalability of the approach to handle a wider range of external loads, as well as investigate ways to improve the efficiency and robustness of the estimation and control algorithms. Incorporating learning-based approaches or contact-aware motion planning could also be valuable extensions to this work.
Conclusion
This paper presents a promising framework for enabling humanoid robots to perform loco-manipulation tasks in the presence of significant external loads, which is a key requirement for robots operating in real-world environments. By combining online inertial parameter estimation and whole-body control, the system allows the robot to adapt its behavior to changing external conditions, a remarkable skill that has yet to be fully replicated in humanoid robotics.
The authors' work represents an important step towards more robust and capable legged manipulation and autonomous locomotion for humanoid robots, with potential applications in dull, dirty, and dangerous tasks. Further research is needed to address the limitations and expand the capabilities of this approach, but the results presented in this paper are a promising foundation for future advancements in this field.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Visual Whole-Body Control for Legged Loco-Manipulation
Minghuan Liu, Zixuan Chen, Xuxin Cheng, Yandong Ji, Ri-Zhao Qiu, Ruihan Yang, Xiaolong Wang
0
0
We study the problem of mobile manipulation using legged robots equipped with an arm, namely legged loco-manipulation. The robot legs, while usually utilized for mobility, offer an opportunity to amplify the manipulation capabilities by conducting whole-body control. That is, the robot can control the legs and the arm at the same time to extend its workspace. We propose a framework that can conduct the whole-body control autonomously with visual observations. Our approach, namely Visual Whole-Body Control(VBC), is composed of a low-level policy using all degrees of freedom to track the body velocities along with the end-effector position, and a high-level policy proposing the velocities and end-effector position based on visual inputs. We train both levels of policies in simulation and perform Sim2Real transfer for real robot deployment. We perform extensive experiments and show significant improvements over baselines in picking up diverse objects in different configurations (heights, locations, orientations) and environments.
5/15/2024

HYPERmotion: Learning Hybrid Behavior Planning for Autonomous Loco-manipulation
Jin Wang, Rui Dai, Weijie Wang, Luca Rossini, Francesco Ruscelli, Nikos Tsagarakis
0
0
Enabling robots to autonomously perform hybrid motions in diverse environments can be beneficial for long-horizon tasks such as material handling, household chores, and work assistance. This requires extensive exploitation of intrinsic motion capabilities, extraction of affordances from rich environmental information, and planning of physical interaction behaviors. Despite recent progress has demonstrated impressive humanoid whole-body control abilities, they struggle to achieve versatility and adaptability for new tasks. In this work, we propose HYPERmotion, a framework that learns, selects and plans behaviors based on tasks in different scenarios. We combine reinforcement learning with whole-body optimization to generate motion for 38 actuated joints and create a motion library to store the learned skills. We apply the planning and reasoning features of the large language models (LLMs) to complex loco-manipulation tasks, constructing a hierarchical task graph that comprises a series of primitive behaviors to bridge lower-level execution with higher-level planning. By leveraging the interaction of distilled spatial geometry and 2D observation with a visual language model (VLM) to ground knowledge into a robotic morphology selector to choose appropriate actions in single- or dual-arm, legged or wheeled locomotion. Experiments in simulation and real-world show that learned motions can efficiently adapt to new tasks, demonstrating high autonomy from free-text commands in unstructured scenes. Videos and website: hy-motion.github.io/
6/24/2024

Learning Generic and Dynamic Locomotion of Humanoids Across Discrete Terrains
Shangqun Yu, Nisal Perera, Daniel Marew, Donghyun Kim
0
0
This paper addresses the challenge of terrain-adaptive dynamic locomotion in humanoid robots, a problem traditionally tackled by optimization-based methods or reinforcement learning (RL). Optimization-based methods, such as model-predictive control, excel in finding optimal reaction forces and achieving agile locomotion, especially in quadruped, but struggle with the nonlinear hybrid dynamics of legged systems and the real-time computation of step location, timing, and reaction forces. Conversely, RL-based methods show promise in navigating dynamic and rough terrains but are limited by their extensive data requirements. We introduce a novel locomotion architecture that integrates a neural network policy, trained through RL in simplified environments, with a state-of-the-art motion controller combining model-predictive control (MPC) and whole-body impulse control (WBIC). The policy efficiently learns high-level locomotion strategies, such as gait selection and step positioning, without the need for full dynamics simulations. This control architecture enables humanoid robots to dynamically navigate discrete terrains, making strategic locomotion decisions (e.g., walking, jumping, and leaping) based on ground height maps. Our results demonstrate that this integrated control architecture achieves dynamic locomotion with significantly fewer training samples than conventional RL-based methods and can be transferred to different humanoid platforms without additional training. The control architecture has been extensively tested in dynamic simulations, accomplishing terrain height-based dynamic locomotion for three different robots.
5/28/2024

Non-impulsive Contact-Implicit Motion Planning for Morpho-functional Loco-manipulation
Adarsh Salagame, Kruthika Gangaraju, Harin Kumar Nallaguntla, Eric Sihite, Gunar Schirner, Alireza Ramezani
0
0
Object manipulation has been extensively studied in the context of fixed base and mobile manipulators. However, the overactuated locomotion modality employed by snake robots allows for a unique blend of object manipulation through locomotion, referred to as loco-manipulation. The following work presents an optimization approach to solving the loco-manipulation problem based on non-impulsive implicit contact path planning for our snake robot COBRA. We present the mathematical framework and show high fidelity simulation results for fixed-shape lateral rolling trajectories that demonstrate the object manipulation.
4/16/2024