Visual Whole-Body Control for Legged Loco-Manipulation
2403.16967
0
0
Abstract
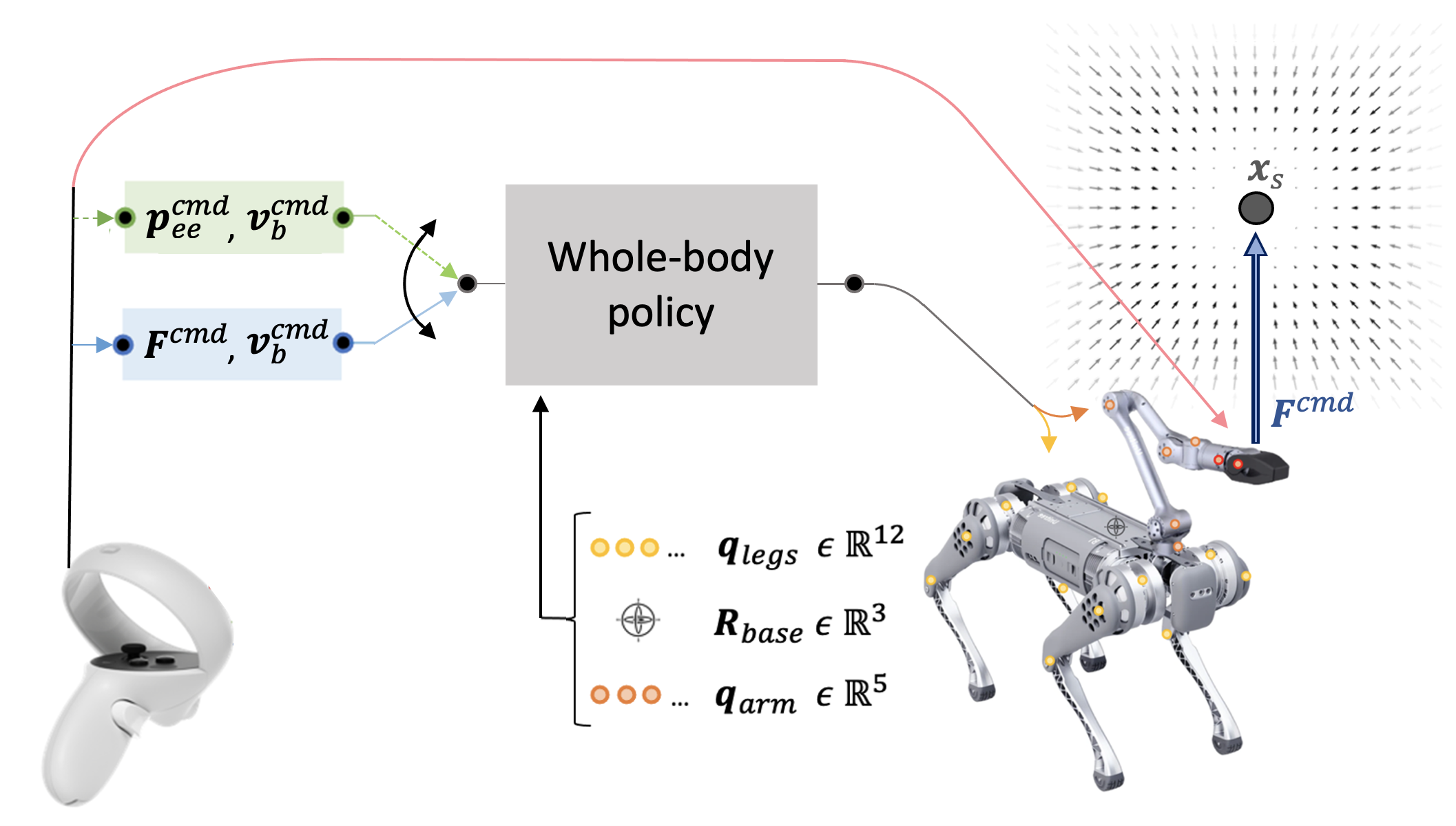
We study the problem of mobile manipulation using legged robots equipped with an arm, namely legged loco-manipulation. The robot legs, while usually utilized for mobility, offer an opportunity to amplify the manipulation capabilities by conducting whole-body control. That is, the robot can control the legs and the arm at the same time to extend its workspace. We propose a framework that can conduct the whole-body control autonomously with visual observations. Our approach, namely Visual Whole-Body Control(VBC), is composed of a low-level policy using all degrees of freedom to track the body velocities along with the end-effector position, and a high-level policy proposing the velocities and end-effector position based on visual inputs. We train both levels of policies in simulation and perform Sim2Real transfer for real robot deployment. We perform extensive experiments and show significant improvements over baselines in picking up diverse objects in different configurations (heights, locations, orientations) and environments.
Create account to get full access
Overview
- This paper presents a visual whole-body control approach for legged robots that can perform complex loco-manipulation tasks, such as navigating through environments while manipulating objects.
- The approach integrates visual perception, whole-body control, and motion planning to enable agile and versatile robot behaviors.
- Experiments on a quadrupedal robot demonstrate the system's ability to handle challenging scenarios involving navigation, object interaction, and dynamic motions.
Plain English Explanation
The paper describes a new way to control legged robots, like four-legged robots, that allows them to move around and manipulate objects in their environment using visual information. The key idea is to combine several different technologies:
- Visual Perception: The robot uses cameras to "see" its surroundings and identify important elements like objects, obstacles, and targets.
- Whole-Body Control: The robot coordinates all of its limbs and body parts to execute complex movements and interactions, not just simple walking.
- Motion Planning: The robot plans out smooth, agile motions to navigate through the environment and interact with objects in a controlled, purposeful way.
By bringing these capabilities together, the researchers enabled the robot to perform challenging tasks that involve both moving around (locomotion) and manipulating things (like picking up and moving objects). This could be useful for robots working in real-world environments, where they need to be able to move flexibly and also interact with their surroundings.
The paper demonstrates this approach on a four-legged robot, showing how it can navigate through cluttered spaces, avoid obstacles, and even pick up and move objects, all while maintaining stability and control. This represents an important advance in the field of legged robotics, as it expands the types of complex, real-world tasks that these robots can handle.
Technical Explanation
The paper presents a Visual Whole-Body Control (VWBC) framework for legged robots that enables them to perform integrated loco-manipulation behaviors. The key components of the VWBC system include:
- Visual Perception: A deep learning-based perception module processes camera images to detect and localize relevant elements in the robot's environment, such as obstacles, target objects, and support surfaces.
- Whole-Body Control: A model-based control formulation optimizes the robot's full-body motion to achieve desired operational space objectives, such as moving the end-effectors to grasp targets while maintaining balance and stability.
- Motion Planning: A non-impulsive contact-implicit motion planner generates dynamically feasible trajectories that respect the robot's kinodynamic constraints and contact interactions.
The integration of these components enables the robot to plan and execute complex loco-manipulation behaviors, such as navigating through cluttered environments while avoiding obstacles and manipulating objects along the way. The experiments on a quadrupedal robot demonstrate the system's ability to handle challenging scenarios involving navigation, object interaction, and dynamic motions.
Critical Analysis
The paper presents a comprehensive approach to visual whole-body control for legged robots, addressing key challenges in perception, planning, and control. The authors acknowledge several limitations and areas for future work:
- Sensing Limitations: The current perception module relies on visual sensing alone, which can be unreliable in certain environments. Incorporating additional sensory modalities, such as depth sensors or tactile feedback, could improve robustness.
- Computational Complexity: The contact-implicit motion planning algorithm has high computational demands, which may limit its real-time performance on resource-constrained platforms. Exploring more efficient planning techniques could improve scalability.
- Generalization: The experiments focus on a specific quadrupedal robot platform. Validating the approach on a wider range of legged robot morphologies and task scenarios would strengthen the generalizability of the findings.
While the paper makes a valuable contribution to the field of legged robotics, further research is needed to address these limitations and potentially extend the capabilities of the VWBC framework. Incorporating more advanced perception, planning, and control methods could lead to even more agile and versatile loco-manipulation behaviors for legged robots operating in complex, real-world environments.
Conclusion
This paper presents a Visual Whole-Body Control (VWBC) framework that enables legged robots to perform integrated loco-manipulation tasks by combining visual perception, whole-body control, and motion planning. The approach allows robots to navigate through cluttered environments while manipulating objects, demonstrating a significant advancement in the capabilities of legged robotic systems. While the paper identifies some limitations, the VWBC framework represents an important step towards developing more agile and versatile legged robots capable of handling complex, real-world tasks.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Learning Force Control for Legged Manipulation
Tifanny Portela, Gabriel B. Margolis, Yandong Ji, Pulkit Agrawal
0
0
Controlling contact forces during interactions is critical for locomotion and manipulation tasks. While sim-to-real reinforcement learning (RL) has succeeded in many contact-rich problems, current RL methods achieve forceful interactions implicitly without explicitly regulating forces. We propose a method for training RL policies for direct force control without requiring access to force sensing. We showcase our method on a whole-body control platform of a quadruped robot with an arm. Such force control enables us to perform gravity compensation and impedance control, unlocking compliant whole-body manipulation. The learned whole-body controller with variable compliance makes it intuitive for humans to teleoperate the robot by only commanding the manipulator, and the robot's body adjusts automatically to achieve the desired position and force. Consequently, a human teleoperator can easily demonstrate a wide variety of loco-manipulation tasks. To the best of our knowledge, we provide the first deployment of learned whole-body force control in legged manipulators, paving the way for more versatile and adaptable legged robots.
5/21/2024
🔗
Physically Consistent Online Inertial Adaptation for Humanoid Loco-manipulation
James Foster, Stephen McCrory, Christian DeBuys, Sylvain Bertrand, Robert Griffin
0
0
The ability to accomplish manipulation and locomotion tasks in the presence of significant time-varying external loads is a remarkable skill of humans that has yet to be replicated convincingly by humanoid robots. Such an ability will be a key requirement in the environments we envision deploying our robots: dull, dirty, and dangerous. External loads constitute a large model bias, which is typically unaccounted for. In this work, we enable our humanoid robot to engage in loco-manipulation tasks in the presence of significant model bias due to external loads. We propose an online estimation and control framework involving the combination of a physically consistent extended Kalman filter for inertial parameter estimation coupled to a whole-body controller. We showcase our results both in simulation and in hardware, where weights are mounted on Nadia's wrist links as a proxy for engaging in tasks where large external loads are applied to the robot.
5/14/2024

Hierarchical World Models as Visual Whole-Body Humanoid Controllers
Nicklas Hansen, Jyothir S V, Vlad Sobal, Yann LeCun, Xiaolong Wang, Hao Su
0
0
Whole-body control for humanoids is challenging due to the high-dimensional nature of the problem, coupled with the inherent instability of a bipedal morphology. Learning from visual observations further exacerbates this difficulty. In this work, we explore highly data-driven approaches to visual whole-body humanoid control based on reinforcement learning, without any simplifying assumptions, reward design, or skill primitives. Specifically, we propose a hierarchical world model in which a high-level agent generates commands based on visual observations for a low-level agent to execute, both of which are trained with rewards. Our approach produces highly performant control policies in 8 tasks with a simulated 56-DoF humanoid, while synthesizing motions that are broadly preferred by humans. Code and videos: https://nicklashansen.com/rlpuppeteer
6/3/2024

Learning Visual Quadrupedal Loco-Manipulation from Demonstrations
Zhengmao He, Kun Lei, Yanjie Ze, Koushil Sreenath, Zhongyu Li, Huazhe Xu
0
0
Quadruped robots are progressively being integrated into human environments. Despite the growing locomotion capabilities of quadrupedal robots, their interaction with objects in realistic scenes is still limited. While additional robotic arms on quadrupedal robots enable manipulating objects, they are sometimes redundant given that a quadruped robot is essentially a mobile unit equipped with four limbs, each possessing 3 degrees of freedom (DoFs). Hence, we aim to empower a quadruped robot to execute real-world manipulation tasks using only its legs. We decompose the loco-manipulation process into a low-level reinforcement learning (RL)-based controller and a high-level Behavior Cloning (BC)-based planner. By parameterizing the manipulation trajectory, we synchronize the efforts of the upper and lower layers, thereby leveraging the advantages of both RL and BC. Our approach is validated through simulations and real-world experiments, demonstrating the robot's ability to perform tasks that demand mobility and high precision, such as lifting a basket from the ground while moving, closing a dishwasher, pressing a button, and pushing a door. Project website: https://zhengmaohe.github.io/leg-manip
4/1/2024