PoIFusion: Multi-Modal 3D Object Detection via Fusion at Points of Interest

0
Sign in to get full access
Overview
- The paper presents a novel multi-modal 3D object detection approach called PoIFusion that fuses data from different sensors at points of interest (PoIs).
- PoIFusion outperforms state-of-the-art methods on popular benchmarks like KITTI and nuScenes.
- The key idea is to focus the fusion process on salient regions (PoIs) instead of performing fusion across the entire scene.
Plain English Explanation
The paper introduces a new method called PoIFusion for detecting 3D objects using data from multiple sensors, such as cameras and LiDAR. The core idea is to only fuse the sensor data at specific points of interest (PoIs) - the regions that are most relevant for object detection - rather than trying to fuse all the data across the entire scene.
This selective fusion approach allows the system to focus on the most important areas, leading to better performance compared to previous methods that fused data across the whole scene. The authors show that PoIFusion outperforms state-of-the-art 3D object detection models on standard benchmarks like KITTI and nuScenes.
Technical Explanation
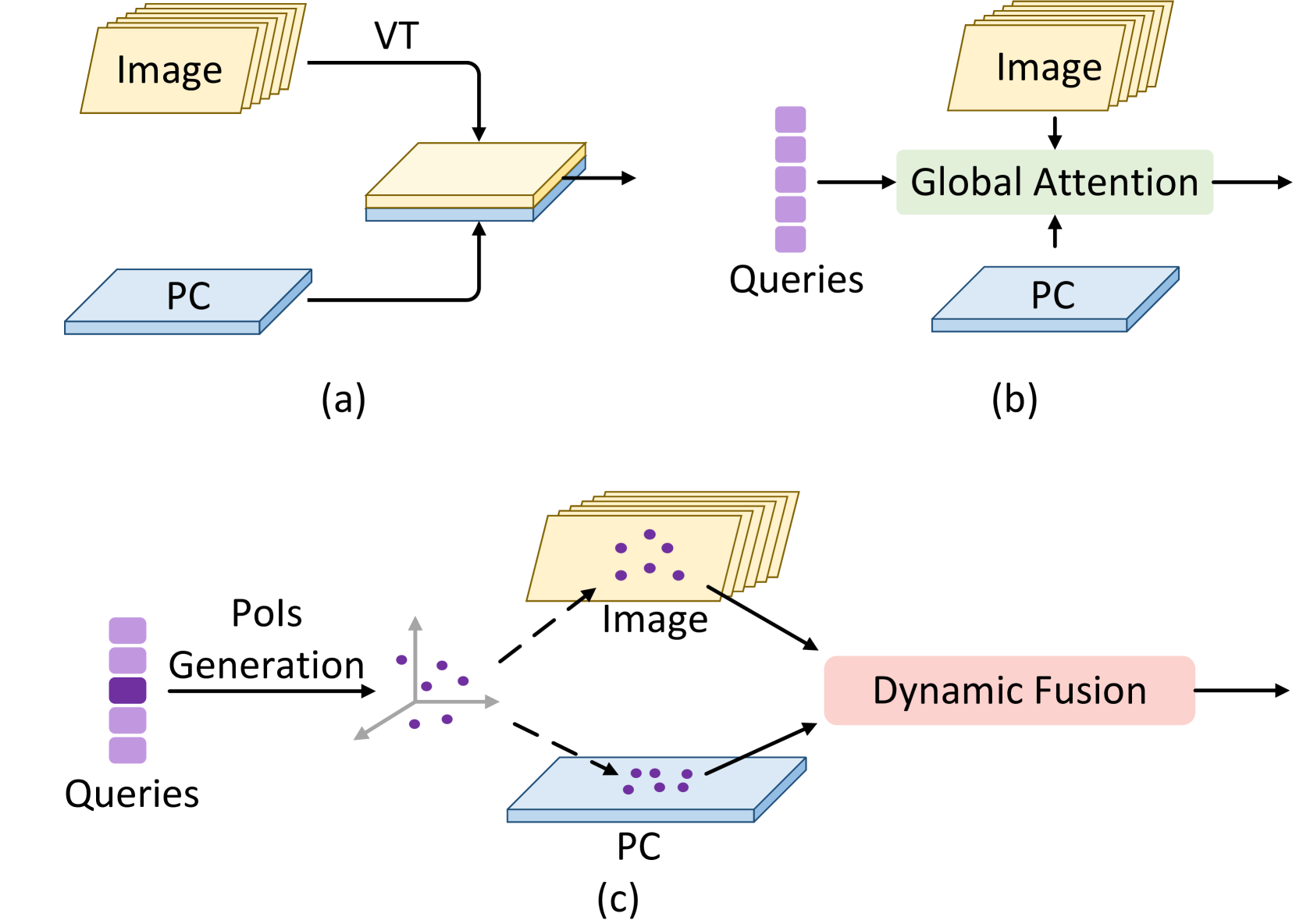
The paper introduces a multi-modal 3D object detection framework called PoIFusion that leverages data from different sensors (e.g., cameras and LiDAR) to achieve improved performance. The key innovation is the fusion of sensor data at points of interest (PoIs) - regions that are most relevant for object detection - rather than fusing data across the entire scene.
The PoIFusion architecture consists of several components:
- PoI Detector: Identifies the most salient regions (PoIs) in the scene using both LiDAR and camera data.
- Modality-Specific Encoders: Separately process the LiDAR and camera data to extract features.
- PoI-based Fusion Module: Fuses the modality-specific features at the identified PoIs to produce the final 3D object detections.
The authors extensively evaluate PoIFusion on the KITTI and nuScenes benchmarks, demonstrating superior performance compared to state-of-the-art methods. They also provide ablation studies to understand the contribution of different components of their approach.
Critical Analysis
The paper presents a well-designed and empirically validated multi-modal 3D object detection approach. The key strength of the work is the selective fusion of sensor data at points of interest, which helps the system focus on the most relevant regions for object detection.
However, the paper could be strengthened by discussing potential limitations or edge cases of the PoIFusion approach. For example, it would be helpful to know how the method performs in cluttered or occluded environments, or how sensitive it is to sensor alignment and calibration errors.
Additionally, the authors could explore the computational efficiency of their approach and consider trade-offs between accuracy and inference speed, which would be crucial for real-world deployments.
Conclusion
The PoIFusion paper presents an effective multi-modal 3D object detection method that outperforms state-of-the-art techniques on popular benchmarks. The key innovation is the selective fusion of sensor data at points of interest, which allows the system to focus on the most relevant regions for object detection.
The strong empirical results demonstrate the potential of this approach and suggest that it could have significant real-world applications in areas like autonomous driving and robotics. Further research on the limitations and efficiency of PoIFusion could help refine and improve the method.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!