Precise Object Placement Using Force-Torque Feedback
2404.17668
0
0
Abstract
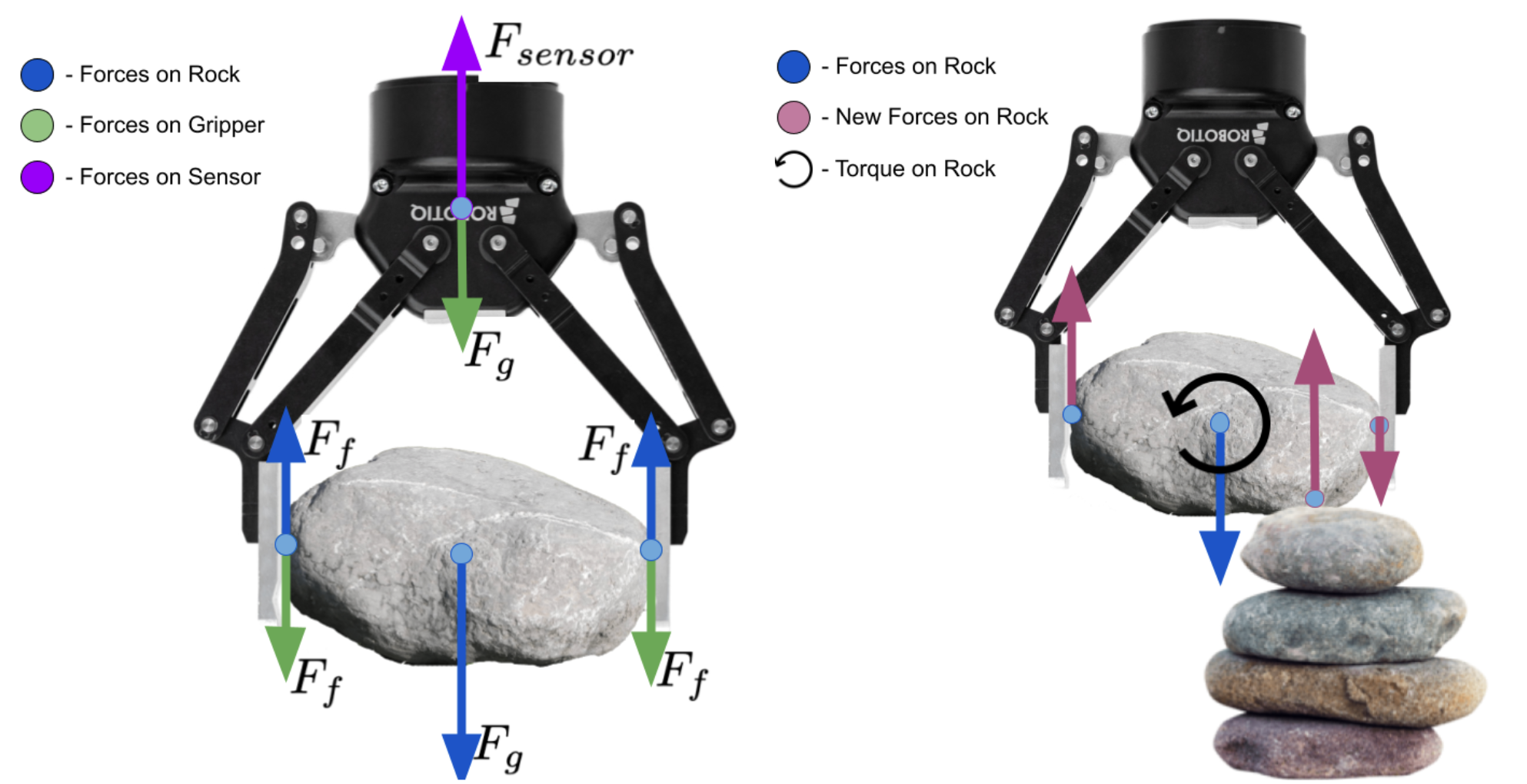
Precise object manipulation and placement is a common problem for household robots, surgery robots, and robots working on in-situ construction. Prior work using computer vision, depth sensors, and reinforcement learning lacks the ability to reactively recover from planning errors, execution errors, or sensor noise. This work introduces a method that uses force-torque sensing to robustly place objects in stable poses, even in adversarial environments. On 46 trials, our method finds success rates of 100% for basic stacking, and 17% for cases requiring adjustment.
Get summaries of the top AI research delivered straight to your inbox:
Overview
- This research paper explores a method for precise object placement using force-torque feedback in robotic systems.
- The proposed approach aims to enable robots to accurately position objects in desired locations by leveraging force and torque measurements during the placement process.
- The researchers present an algorithm and experimental evaluation to demonstrate the effectiveness of their force-torque feedback-based placement technique.
Plain English Explanation
The paper focuses on helping robots place objects in very specific locations with high precision. This is an important capability for many robotic applications, such as assembling products, handling fragile items, or assisting humans.
The key idea is to use feedback from the robot's sensors that measure the force and torque (twisting force) applied during the placement process. By analyzing these force and torque readings, the robot can detect subtle changes that indicate when the object has reached the desired position. This allows the robot to stop the placement motion at the precise moment, rather than relying solely on visual feedback or pre-programmed motions.
The researchers developed an algorithm that uses the force-torque data to guide the robot's placement, making adjustments in real-time to ensure the object is positioned accurately. They then tested this approach in a series of experiments, demonstrating that it can place objects much more precisely than previous methods that didn't utilize this force-torque feedback.
Technical Explanation
The paper presents a novel approach for precise object placement using force-torque feedback. The authors' key insight is that by monitoring the force and torque measurements during the placement process, a robot can detect subtle cues that indicate when the object has reached the desired location.
The proposed algorithm works as follows:
- The robot grasps the object to be placed and moves it towards the target position.
- As the object approaches the target, the robot continuously measures the 6D force-torque feedback (3 forces, 3 torques).
- The algorithm analyzes changes in the force-torque data to detect when the object has made contact with the surface and is in the final placement position.
- Once the desired position is detected, the robot stops the motion to complete the precise placement.
The researchers evaluate their approach through a series of experiments, comparing the placement accuracy to baseline methods that rely solely on vision or pre-programmed motion. The results demonstrate that the force-torque feedback enables significantly more precise object positioning, with errors reduced by over 50% in some cases.
Critical Analysis
The paper presents a compelling approach for improving the precision of robotic object placement tasks. The use of force-torque feedback to guide the final placement stage is a clever idea that addresses an important limitation of vision-based or pre-programmed placement methods.
One potential limitation noted by the authors is the need for accurate force-torque sensor calibration to ensure reliable measurements. If the sensors are not properly calibrated, the algorithm may not be able to correctly interpret the force-torque signals and could lead to placement errors. The authors suggest exploring sensor fusion techniques to improve robustness in this area.
Additionally, the experiments were conducted in relatively controlled laboratory settings. Further research would be needed to evaluate the performance of this approach in more complex, real-world environments with varying surfaces, object properties, and disturbances. Integrating this force-torque feedback technique with other robotic placement optimization methods could also be an interesting direction for future work.
Overall, the research presents a promising step towards enhancing the precision and reliability of robotic object placement tasks, which has important implications for a wide range of applications in manufacturing, logistics, and assistive robotics.
Conclusion
This paper introduces a novel approach for precise object placement using force-torque feedback. By leveraging the subtle changes in force and torque measurements during the placement process, the proposed algorithm can detect when an object has reached the desired position and stop the motion accordingly.
The experimental results demonstrate that this force-torque feedback-based approach can significantly improve the accuracy of object placement compared to traditional vision-based or pre-programmed methods. While further research is needed to evaluate the approach in more complex real-world scenarios, the authors' work represents an important contribution towards enhancing the precision and reliability of robotic manipulation tasks.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
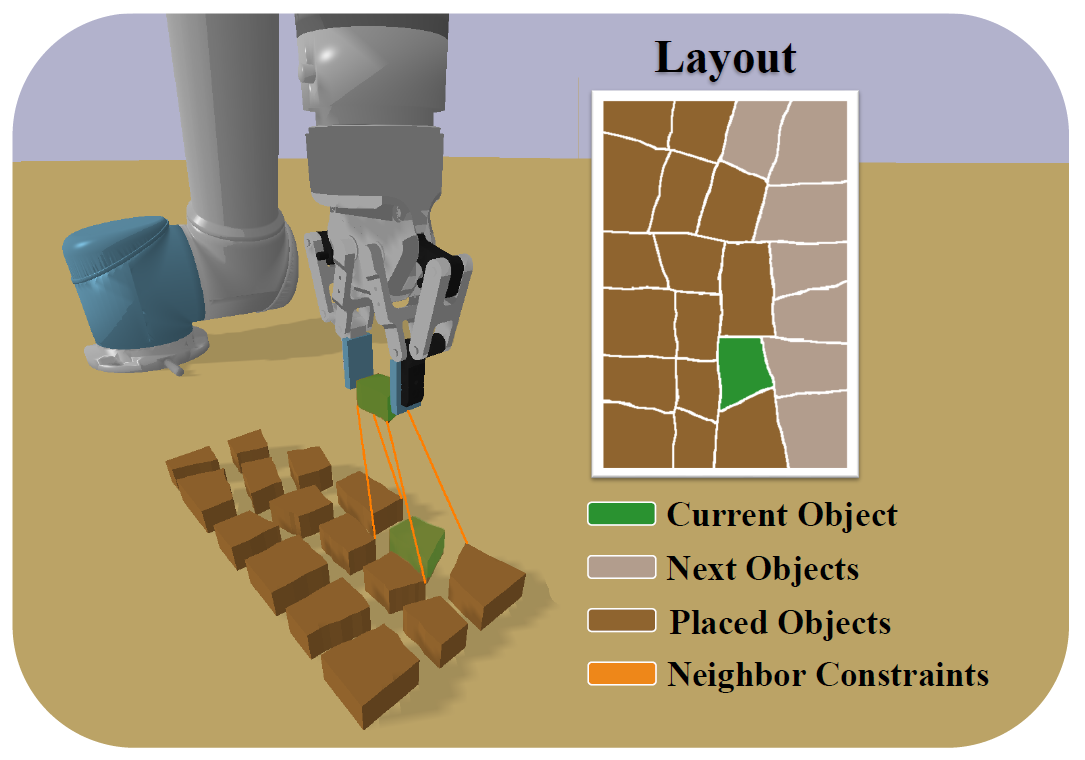
Constrained Object Placement Using Reinforcement Learning
Benedikt Kreis, Nils Dengler, Jorge de Heuvel, Rohit Menon, Hamsa Datta Perur, Maren Bennewitz
0
0
Close and precise placement of irregularly shaped objects requires a skilled robotic system. Particularly challenging is the manipulation of objects that have sensitive top surfaces and a fixed set of neighbors. To avoid damaging the surface, they have to be grasped from the side, and during placement, their neighbor relations have to be maintained. In this work, we train a reinforcement learning agent that generates smooth end-effector motions to place objects as close as possible next to each other. During the placement, our agent considers neighbor constraints defined in a given layout of the objects while trying to avoid collisions. Our approach learns to place compact object assemblies without the need for predefined spacing between objects as required by traditional methods. We thoroughly evaluated our approach using a two-finger gripper mounted to a robotic arm with six degrees of freedom. The results show that our agent outperforms two baseline approaches in terms of object assembly compactness, thereby reducing the needed space to place the objects according to the given neighbor constraints. On average, our approach reduces the distances between all placed objects by at least 60%, with fewer collisions at the same compactness compared to both baselines.
4/17/2024
⛏️
Guarding Force: Safety-Critical Compliant Control for Robot-Environment Interaction
Xinming Wang, Jun Yang, Jianliang Mao, Jinzhuo Liang, Shihua Li, Yunda Yan
0
0
In this study, we propose a safety-critical compliant control strategy designed to strictly enforce interaction force constraints during the physical interaction of robots with unknown environments. The interaction force constraint is interpreted as a new force-constrained control barrier function (FC-CBF) by exploiting the generalized contact model and the prior information of the environment, i.e., the prior stiffness and rest position, for robot kinematics. The difference between the real environment and the generalized contact model is approximated by constructing a tracking differentiator, and its estimation error is quantified based on Lyapunov theory. By interpreting strict interaction safety specification as a dynamic constraint, restricting the desired joint angular rates in kinematics, the proposed approach modifies nominal compliant controllers using quadratic programming, ensuring adherence to interaction force constraints in unknown environments. The strict force constraint and the stability of the closed-loop system are rigorously analyzed. Experimental tests using a UR3e industrial robot with different environments verify the effectiveness of the proposed method in achieving the force constraints in unknown environments.
5/9/2024
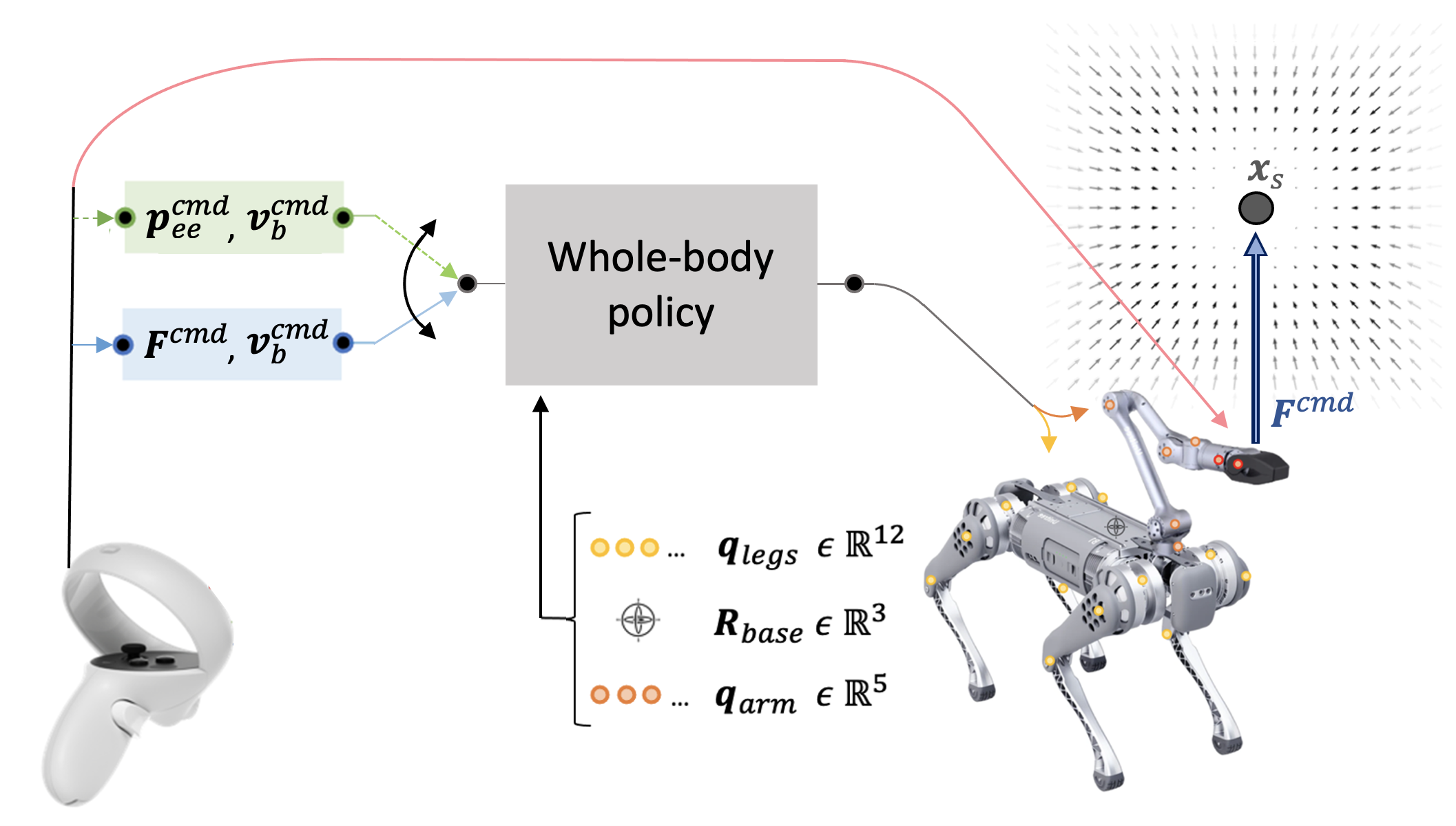
Learning Force Control for Legged Manipulation
Tifanny Portela, Gabriel B. Margolis, Yandong Ji, Pulkit Agrawal
0
0
Controlling contact forces during interactions is critical for locomotion and manipulation tasks. While sim-to-real reinforcement learning (RL) has succeeded in many contact-rich problems, current RL methods achieve forceful interactions implicitly without explicitly regulating forces. We propose a method for training RL policies for direct force control without requiring access to force sensing. We showcase our method on a whole-body control platform of a quadruped robot with an arm. Such force control enables us to perform gravity compensation and impedance control, unlocking compliant whole-body manipulation. The learned whole-body controller with variable compliance makes it intuitive for humans to teleoperate the robot by only commanding the manipulator, and the robot's body adjusts automatically to achieve the desired position and force. Consequently, a human teleoperator can easily demonstrate a wide variety of loco-manipulation tasks. To the best of our knowledge, we provide the first deployment of learned whole-body force control in legged manipulators, paving the way for more versatile and adaptable legged robots.
5/3/2024
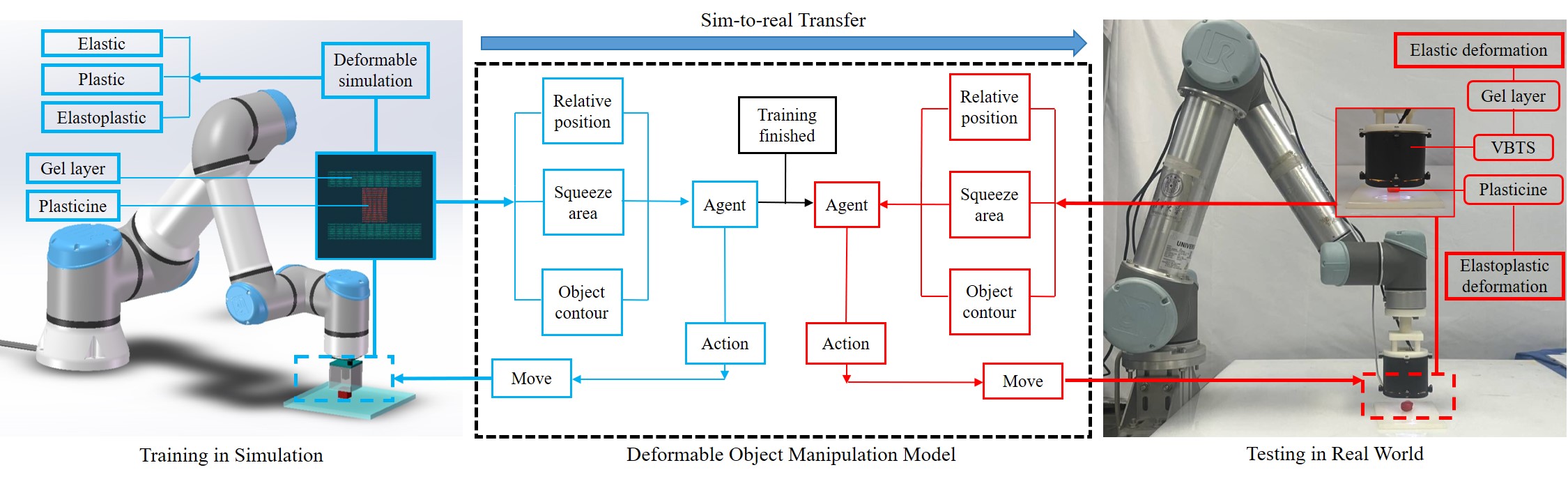
Soft Contact Simulation and Manipulation Learning of Deformable Objects with Vision-based Tactile Sensor
Jianhua Shan, Yuhao Sun, Shixin Zhang, Fuchun Sun, Zixi Chen, Zirong Shen, Cesare Stefanini, Yiyong Yang, Shan Luo, Bin Fang
0
0
Deformable object manipulation is a classical and challenging research area in robotics. Compared with rigid object manipulation, this problem is more complex due to the deformation properties including elastic, plastic, and elastoplastic deformation. In this paper, we describe a new deformable object manipulation method including soft contact simulation, manipulation learning, and sim-to-real transfer. We propose a novel approach utilizing Vision-Based Tactile Sensors (VBTSs) as the end-effector in simulation to produce observations like relative position, squeezed area, and object contour, which are transferable to real robots. For a more realistic contact simulation, a new simulation environment including elastic, plastic, and elastoplastic deformations is created. We utilize RL strategies to train agents in the simulation, and expert demonstrations are applied for challenging tasks. Finally, we build a real experimental platform to complete the sim-to-real transfer and achieve a 90% success rate on difficult tasks such as cylinder and sphere. To test the robustness of our method, we use plasticine of different hardness and sizes to repeat the tasks including cylinder and sphere. The experimental results show superior performances of deformable object manipulation with the proposed method.
5/14/2024