Constrained Object Placement Using Reinforcement Learning
2404.10632
0
0
Abstract
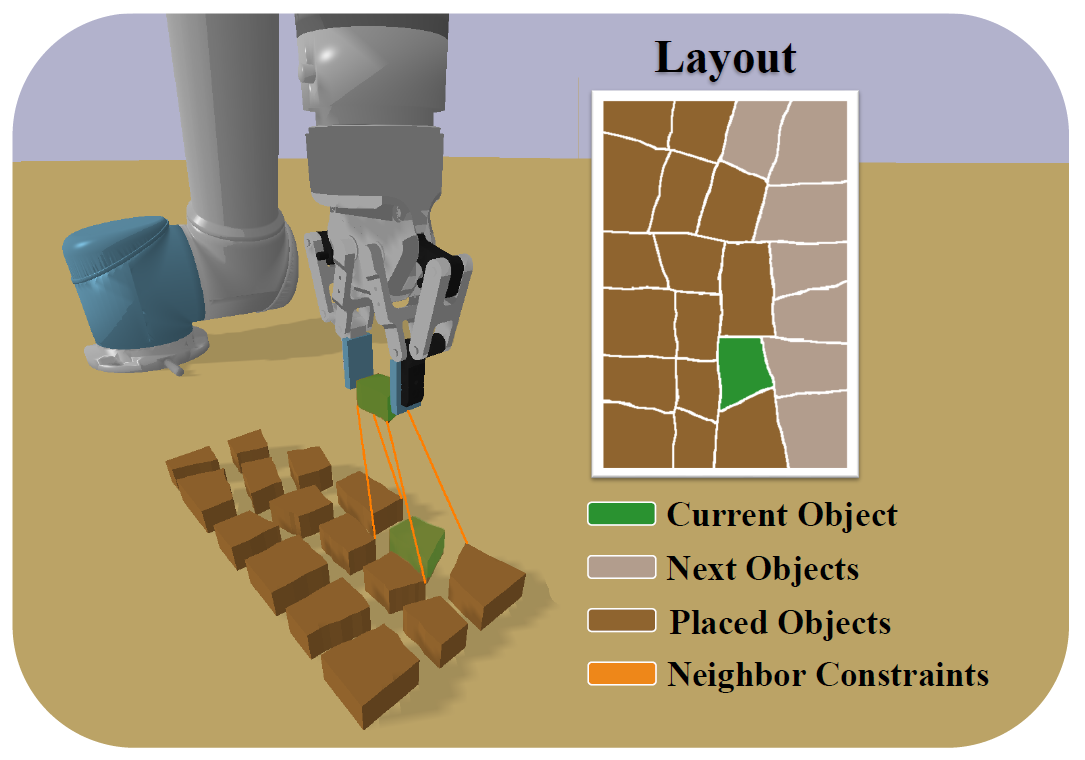
Close and precise placement of irregularly shaped objects requires a skilled robotic system. Particularly challenging is the manipulation of objects that have sensitive top surfaces and a fixed set of neighbors. To avoid damaging the surface, they have to be grasped from the side, and during placement, their neighbor relations have to be maintained. In this work, we train a reinforcement learning agent that generates smooth end-effector motions to place objects as close as possible next to each other. During the placement, our agent considers neighbor constraints defined in a given layout of the objects while trying to avoid collisions. Our approach learns to place compact object assemblies without the need for predefined spacing between objects as required by traditional methods. We thoroughly evaluated our approach using a two-finger gripper mounted to a robotic arm with six degrees of freedom. The results show that our agent outperforms two baseline approaches in terms of object assembly compactness, thereby reducing the needed space to place the objects according to the given neighbor constraints. On average, our approach reduces the distances between all placed objects by at least 60%, with fewer collisions at the same compactness compared to both baselines.
Get summaries of the top AI research delivered straight to your inbox:
Overview
- This paper presents a reinforcement learning-based approach for constrained object placement in 3D environments.
- The proposed method allows for the efficient placement of objects while satisfying various constraints, such as collision avoidance and stability.
- The authors demonstrate the effectiveness of their approach through simulation experiments and real-world robotic applications.
Plain English Explanation
The paper discusses a way to use reinforcement learning to help robots place objects in 3D spaces while following certain rules or constraints. Reinforcement learning is a type of machine learning where the robot learns by trial and error, getting rewards for good actions and punishments for bad ones.
The key idea is that the robot can learn how to place objects in a way that satisfies various requirements, such as not letting the object collide with other objects or making sure the object is stable and won't fall over. This is important for real-world applications like robotic assembly or household tasks where objects need to be placed carefully.
The authors show that their reinforcement learning-based approach can effectively place objects in simulated 3D environments and also work on real robotic systems. This demonstrates the potential of this technique to be used in practical robotics applications that require precise and constrained object placement.
Technical Explanation
The paper introduces a reinforcement learning-based framework for [object Object] in 3D environments. The key components of the approach include:
- State Representation: The robot's state is represented using a combination of the object's position, orientation, and additional features such as collision avoidance and stability constraints.
- Action Space: The action space consists of continuous adjustments to the object's position and orientation to satisfy the placement constraints.
- Reward Function: The reward function encourages the placement of objects in a way that minimizes collisions, maintains stability, and aligns with the desired goal configuration.
- Learning Algorithm: The authors use a [object Object] algorithm to train the robot to learn the optimal placement policies.
The proposed method is evaluated through extensive simulation experiments and real-world robotic applications, demonstrating its effectiveness in handling various constraint scenarios and its potential for practical use in tasks such as [object Object] and household object placement.
Critical Analysis
The paper presents a promising approach for constrained object placement using reinforcement learning. However, the authors acknowledge several limitations and areas for future research:
- The current framework assumes known object shapes and environments, which may not always be the case in real-world scenarios. Incorporating [object Object] could further improve the robustness of the system.
- The training process can be computationally expensive, especially for complex environments with many constraints. Exploring more efficient [object Object] techniques could help reduce the training time.
- The paper focuses on static object placement, but [object Object] scenarios, such as placing objects while avoiding moving obstacles, could be an interesting area for future research.
Overall, the proposed approach shows promising results and paves the way for further advancements in the field of constrained object placement using reinforcement learning.
Conclusion
This paper presents a reinforcement learning-based framework for constrained object placement in 3D environments. The key contributions include a novel state representation, action space, and reward function that enable the robot to learn optimal placement policies while satisfying various constraints, such as collision avoidance and stability.
The authors demonstrate the effectiveness of their approach through extensive simulation experiments and real-world robotic applications, showcasing the potential of this technique for practical use in tasks like robotic assembly and household object placement. While the current framework has some limitations, the paper highlights opportunities for future research, such as incorporating uncertainty-aware object detection and exploring dynamic placement scenarios.
Overall, this work advances the state-of-the-art in constrained object placement and provides a valuable foundation for further developments in the field of reinforcement learning-based robotic manipulation.
Related Papers
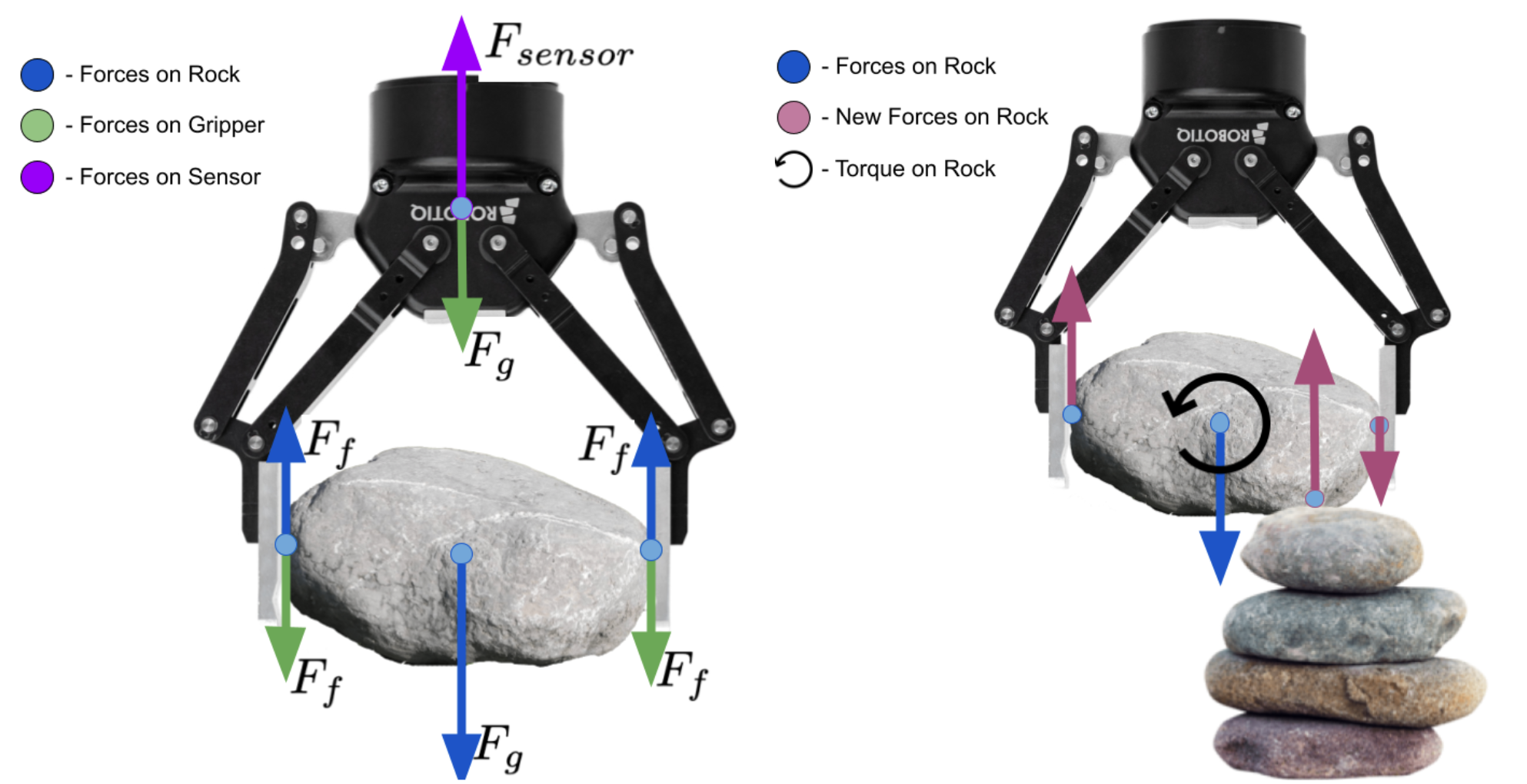
Precise Object Placement Using Force-Torque Feedback
Osher Lerner, Zachary Tam, Michael Equi
0
0
Precise object manipulation and placement is a common problem for household robots, surgery robots, and robots working on in-situ construction. Prior work using computer vision, depth sensors, and reinforcement learning lacks the ability to reactively recover from planning errors, execution errors, or sensor noise. This work introduces a method that uses force-torque sensing to robustly place objects in stable poses, even in adversarial environments. On 46 trials, our method finds success rates of 100% for basic stacking, and 17% for cases requiring adjustment.
4/30/2024
Safe Reinforcement Learning on the Constraint Manifold: Theory and Applications
Puze Liu, Haitham Bou-Ammar, Jan Peters, Davide Tateo
0
0
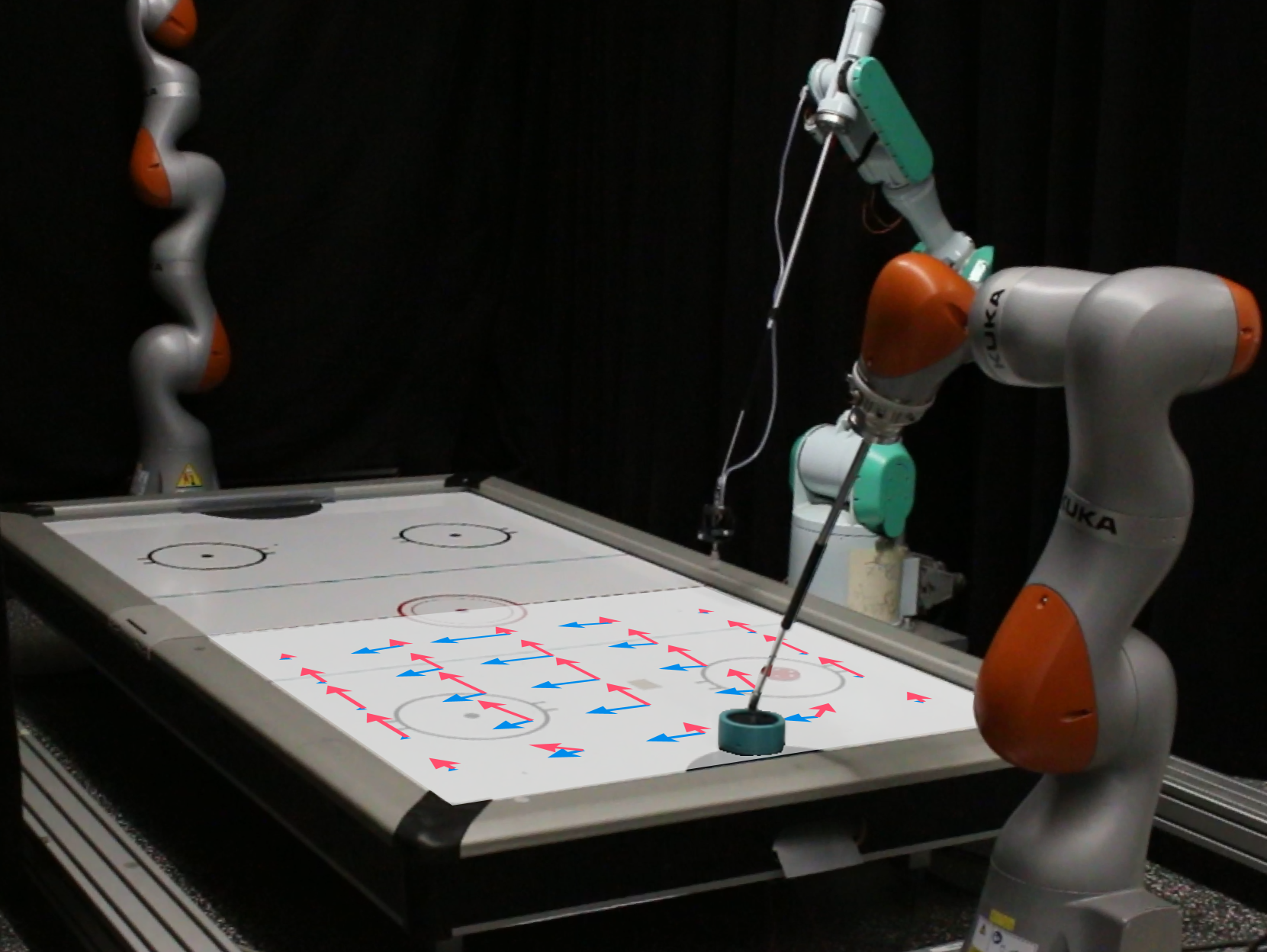
Integrating learning-based techniques, especially reinforcement learning, into robotics is promising for solving complex problems in unstructured environments. However, most existing approaches are trained in well-tuned simulators and subsequently deployed on real robots without online fine-tuning. In this setting, the simulation's realism seriously impacts the deployment's success rate. Instead, learning with real-world interaction data offers a promising alternative: not only eliminates the need for a fine-tuned simulator but also applies to a broader range of tasks where accurate modeling is unfeasible. One major problem for on-robot reinforcement learning is ensuring safety, as uncontrolled exploration can cause catastrophic damage to the robot or the environment. Indeed, safety specifications, often represented as constraints, can be complex and non-linear, making safety challenging to guarantee in learning systems. In this paper, we show how we can impose complex safety constraints on learning-based robotics systems in a principled manner, both from theoretical and practical points of view. Our approach is based on the concept of the Constraint Manifold, representing the set of safe robot configurations. Exploiting differential geometry techniques, i.e., the tangent space, we can construct a safe action space, allowing learning agents to sample arbitrary actions while ensuring safety. We demonstrate the method's effectiveness in a real-world Robot Air Hockey task, showing that our method can handle high-dimensional tasks with complex constraints. Videos of the real robot experiments are available on the project website (https://puzeliu.github.io/TRO-ATACOM).
4/16/2024

Learning Manipulation Tasks in Dynamic and Shared 3D Spaces
Hariharan Arunachalam, Marc Hanheide, Sariah Mghames
0
0
Automating the segregation process is a need for every sector experiencing a high volume of materials handling, repetitive and exhaustive operations, in addition to risky exposures. Learning automated pick-and-place operations can be efficiently done by introducing collaborative autonomous systems (e.g. manipulators) in the workplace and among human operators. In this paper, we propose a deep reinforcement learning strategy to learn the place task of multi-categorical items from a shared workspace between dual-manipulators and to multi-goal destinations, assuming the pick has been already completed. The learning strategy leverages first a stochastic actor-critic framework to train an agent's policy network, and second, a dynamic 3D Gym environment where both static and dynamic obstacles (e.g. human factors and robot mate) constitute the state space of a Markov decision process. Learning is conducted in a Gazebo simulator and experiments show an increase in cumulative reward function for the agent further away from human factors. Future investigations will be conducted to enhance the task performance for both agents simultaneously.
4/30/2024

Symmetry-aware Reinforcement Learning for Robotic Assembly under Partial Observability with a Soft Wrist
Hai Nguyen, Tadashi Kozuno, Cristian C. Beltran-Hernandez, Masashi Hamaya
0
0
This study tackles the representative yet challenging contact-rich peg-in-hole task of robotic assembly, using a soft wrist that can operate more safely and tolerate lower-frequency control signals than a rigid one. Previous studies often use a fully observable formulation, requiring external setups or estimators for the peg-to-hole pose. In contrast, we use a partially observable formulation and deep reinforcement learning from demonstrations to learn a memory-based agent that acts purely on haptic and proprioceptive signals. Moreover, previous works do not incorporate potential domain symmetry and thus must search for solutions in a bigger space. Instead, we propose to leverage the symmetry for sample efficiency by augmenting the training data and constructing auxiliary losses to force the agent to adhere to the symmetry. Results in simulation with five different symmetric peg shapes show that our proposed agent can be comparable to or even outperform a state-based agent. In particular, the sample efficiency also allows us to learn directly on the real robot within 3 hours.
5/1/2024