A Prototype-Based Neural Network for Image Anomaly Detection and Localization

0
🧠
Sign in to get full access
Overview
- This paper proposes a novel approach called ProtoAD for image anomaly detection and localization.
- ProtoAD can not only classify images as normal or anomalous but also identify the specific regions within an image that are anomalous.
- The key innovations include using pre-trained features, learning prototypes of normal patches, and constructing a neural network architecture that can perform end-to-end anomaly detection and localization.
- Experiments on challenging industrial datasets show that ProtoAD achieves competitive performance compared to state-of-the-art methods while being faster at inference.
Plain English Explanation
The paper describes a system called ProtoAD that can automatically detect and locate anomalies in images. This is useful in a variety of industrial applications, such as quality control or fault detection in manufacturing.
ProtoAD works by first extracting features from normal images using a pre-trained deep neural network. It then learns a set of "prototypes" that represent the common patterns in these normal images.
Next, ProtoAD uses these prototypes to build a neural network that can take a new image as input and identify any regions that are anomalous or different from the normal patterns it has learned. This is done in an end-to-end fashion, without requiring a separate training phase.
The key advantage of ProtoAD is that it can not only classify an entire image as normal or anomalous, but also pinpoint the specific locations within the image that are problematic. This gives users more detailed and actionable information compared to just getting a binary normal/anomalous classification.
The researchers tested ProtoAD on challenging industrial datasets and found that it performs as well as or better than other state-of-the-art anomaly detection methods, while also being faster to run. This suggests ProtoAD could be a useful tool for real-world applications that require rapid and precise anomaly detection and localization.
Technical Explanation
The paper introduces a prototype-based neural network called ProtoAD for image anomaly detection and localization. The core ideas are:
-
Feature Extraction: The system first extracts image features using a deep neural network pre-trained on natural images. This provides a rich set of visual features without the need for costly training.
-
Prototype Learning: The researchers then learn a set of prototypes that represent the common patterns in normal image patches. This is done through non-parametric clustering of the extracted features.
-
Anomaly Localization: ProtoAD constructs an end-to-end neural network architecture that takes an input image and outputs an anomaly localization map. This network uses the learned prototypes as the kernels of a 1x1 convolutional layer, allowing it to detect deviations from the normal prototypes.
The key advantage of this approach is that it can perform both image-level anomaly classification and pixel-level anomaly localization without requiring a separate training phase. The prototypes serve as the "knowledge" that the network uses to identify anomalies.
Experiments on the MVTec AD and BTAD industrial anomaly detection datasets show that ProtoAD achieves state-of-the-art performance in terms of both accuracy and inference speed. This suggests it could be a practical solution for real-world industrial applications that need robust and efficient anomaly detection and localization.
Critical Analysis
The paper presents a well-designed and carefully evaluated approach to the important problem of image anomaly detection and localization. The key strengths of ProtoAD include its ability to leverage pre-trained features, learn effective prototypes in an unsupervised manner, and perform end-to-end anomaly detection without additional training.
However, the paper does not discuss certain limitations or potential issues with the proposed method. For example, the reliance on pre-trained features may limit the system's ability to generalize to domains very different from the original pre-training data. Additionally, the prototype learning process could be sensitive to hyperparameters or the diversity of the normal training data.
Further research could explore ways to make the prototype learning more robust or adaptive, perhaps by incorporating anomaly-aware techniques like PatchAD or HFRA. It would also be valuable to test ProtoAD on a wider range of industrial anomaly detection scenarios, including those with complex textures or adversarial attacks.
Overall, this paper makes a compelling contribution to the field of image anomaly detection and localization. While there are some avenues for further research, ProtoAD appears to be a promising and practical solution for real-world industrial applications.
Conclusion
This paper introduces ProtoAD, a novel prototype-based neural network for image anomaly detection and localization. The key innovations include leveraging pre-trained features, learning unsupervised prototypes of normal image patches, and constructing an end-to-end anomaly detection and localization system.
Experiments on challenging industrial datasets demonstrate that ProtoAD achieves strong performance compared to state-of-the-art methods, while also being faster at inference. This suggests ProtoAD could be a valuable tool for real-world applications that require robust and efficient anomaly detection, such as quality control in manufacturing.
Overall, this research advances the field of image anomaly detection and localization, providing a practical solution that can identify not just whether an image is anomalous, but precisely where the anomalies are located. As industrial automation and quality assurance continue to rely more on computer vision, tools like ProtoAD will likely become increasingly important.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧠
0
A Prototype-Based Neural Network for Image Anomaly Detection and Localization
Chao Huang, Zhao Kang, Hong Wu
Image anomaly detection and localization perform not only image-level anomaly classification but also locate pixel-level anomaly regions. Recently, it has received much research attention due to its wide application in various fields. This paper proposes ProtoAD, a prototype-based neural network for image anomaly detection and localization. First, the patch features of normal images are extracted by a deep network pre-trained on nature images. Then, the prototypes of the normal patch features are learned by non-parametric clustering. Finally, we construct an image anomaly localization network (ProtoAD) by appending the feature extraction network with $L2$ feature normalization, a $1times1$ convolutional layer, a channel max-pooling, and a subtraction operation. We use the prototypes as the kernels of the $1times1$ convolutional layer; therefore, our neural network does not need a training phase and can conduct anomaly detection and localization in an end-to-end manner. Extensive experiments on two challenging industrial anomaly detection datasets, MVTec AD and BTAD, demonstrate that ProtoAD achieves competitive performance compared to the state-of-the-art methods with a higher inference speed. The source code is available at: https://github.com/98chao/ProtoAD.
Read more5/28/2024

0
PatchAD: A Lightweight Patch-based MLP-Mixer for Time Series Anomaly Detection
Zhijie Zhong, Zhiwen Yu, Yiyuan Yang, Weizheng Wang, Kaixiang Yang
Anomaly detection in time series analysis is a pivotal task, yet it poses the challenge of discerning normal and abnormal patterns in label-deficient scenarios. While prior studies have largely employed reconstruction-based approaches, which limits the models' representational capacities. Moreover, existing deep learning-based methods are not sufficiently lightweight. Addressing these issues, we present PatchAD, our novel, highly efficient multiscale patch-based MLP-Mixer architecture that utilizes contrastive learning for representation extraction and anomaly detection. With its four distinct MLP Mixers and innovative dual project constraint module, PatchAD mitigates potential model degradation and offers a lightweight solution, requiring only $3.2$MB. Its efficacy is demonstrated by state-of-the-art results across $9$ datasets sourced from different application scenarios, outperforming over $30$ comparative algorithms. PatchAD significantly improves the classical F1 score by $50.5%$, the Aff-F1 score by $7.8%$, and the AUC by $10.0%$. The code is publicly available. url{https://github.com/EmorZz1G/PatchAD}
Read more5/29/2024
0
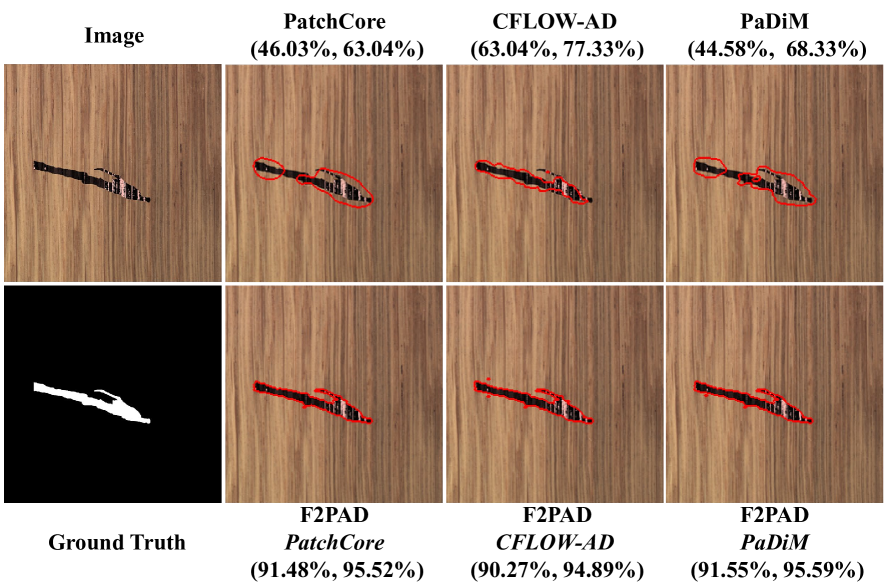
F2PAD: A General Optimization Framework for Feature-Level to Pixel-Level Anomaly Detection
Chengyu Tao, Hao Xu, Juan Du
Image-based inspection systems have been widely deployed in manufacturing production lines. Due to the scarcity of defective samples, unsupervised anomaly detection that only leverages normal samples during training to detect various defects is popular. Existing feature-based methods, utilizing deep features from pretrained neural networks, show their impressive performance in anomaly localization and the low demand for the sample size for training. However, the detected anomalous regions of these methods always exhibit inaccurate boundaries, which impedes the downstream tasks. This deficiency is caused: (i) The decreased resolution of high-level features compared with the original image, and (ii) The mixture of adjacent normal and anomalous pixels during feature extraction. To address them, we propose a novel unified optimization framework (F2PAD) that leverages the Feature-level information to guide the optimization process for Pixel-level Anomaly Detection in the inference stage. The proposed framework is universal and plug-and-play, which can enhance various feature-based methods with limited assumptions. Case studies are provided to demonstrate the effectiveness of our strategy, particularly when applied to three popular backbone methods: PaDiM, CFLOW-AD, and PatchCore.
Read more7/10/2024

0
GeneralAD: Anomaly Detection Across Domains by Attending to Distorted Features
Luc P. J. Strater, Mohammadreza Salehi, Efstratios Gavves, Cees G. M. Snoek, Yuki M. Asano
In the domain of anomaly detection, methods often excel in either high-level semantic or low-level industrial benchmarks, rarely achieving cross-domain proficiency. Semantic anomalies are novelties that differ in meaning from the training set, like unseen objects in self-driving cars. In contrast, industrial anomalies are subtle defects that preserve semantic meaning, such as cracks in airplane components. In this paper, we present GeneralAD, an anomaly detection framework designed to operate in semantic, near-distribution, and industrial settings with minimal per-task adjustments. In our approach, we capitalize on the inherent design of Vision Transformers, which are trained on image patches, thereby ensuring that the last hidden states retain a patch-based structure. We propose a novel self-supervised anomaly generation module that employs straightforward operations like noise addition and shuffling to patch features to construct pseudo-abnormal samples. These features are fed to an attention-based discriminator, which is trained to score every patch in the image. With this, our method can both accurately identify anomalies at the image level and also generate interpretable anomaly maps. We extensively evaluated our approach on ten datasets, achieving state-of-the-art results in six and on-par performance in the remaining for both localization and detection tasks.
Read more7/18/2024