RAIL: Robot Affordance Imagination with Large Language Models
2403.19369
0
0

Abstract
This paper introduces an automatic affordance reasoning paradigm tailored to minimal semantic inputs, addressing the critical challenges of classifying and manipulating unseen classes of objects in household settings. Inspired by human cognitive processes, our method integrates generative language models and physics-based simulators to foster analytical thinking and creative imagination of novel affordances. Structured with a tripartite framework consisting of analysis, imagination, and evaluation, our system analyzes the requested affordance names into interaction-based definitions, imagines the virtual scenarios, and evaluates the object affordance. If an object is recognized as possessing the requested affordance, our method also predicts the optimal pose for such functionality, and how a potential user can interact with it. Tuned on only a few synthetic examples across 3 affordance classes, our pipeline achieves a very high success rate on affordance classification and functional pose prediction of 8 classes of novel objects, outperforming learning-based baselines. Validation through real robot manipulating experiments demonstrates the practical applicability of the imagined user interaction, showcasing the system's ability to independently conceptualize unseen affordances and interact with new objects and scenarios in everyday settings.
Create account to get full access
Overview
This paper presents RAIL (Robot Affordance Imagination with Large Language Models), a novel approach that leverages large language models to enable robots to discover and reason about object affordances - the possible actions that can be performed on an object. The key idea is to use natural language processing and generation capabilities of large language models to infer and imagine the affordances of objects, without requiring extensive training on specific object instances.
Plain English Explanation
Robots are often designed to perform specific tasks, like picking up and moving objects. However, in the real world, robots need to be able to interact with a wide variety of objects, many of which they may not have been trained on before. This paper introduces a new way for robots to learn about the possible actions they can take with different objects, using powerful language models.
The researchers developed a system called RAIL that allows robots to "imagine" the affordances of objects just by looking at them and describing them in natural language. The robot doesn't need to have extensive training data on each object - instead, it can leverage the knowledge captured in large language models, which have been trained on huge amounts of text data, to infer what kinds of actions might be possible.
For example, if a robot sees a cup, it can use RAIL to generate a description of the cup and then use that description to imagine that the cup can be grasped, lifted, or filled with liquid. This allows the robot to quickly learn about new objects and figure out how to interact with them, without requiring tons of specialized training data.
The key benefit of this approach is that it makes robots more flexible and adaptable, since they don't have to be explicitly trained on every object they might encounter. Instead, they can use their natural language understanding to "figure out" the affordances of new objects on the fly. This could be especially useful in real-world environments where robots need to handle a wide variety of objects.
Technical Explanation
The RAIL system leverages large language models like GPT-3 to generate natural language descriptions of objects and then use those descriptions to infer the potential affordances of those objects. The core components of the RAIL architecture include:
-
Object Description Generation: Given an image of an object, RAIL uses a vision-language model to generate a natural language description of the object's characteristics and properties.
-
Affordance Imagination: RAIL then takes the generated object description and feeds it into a large language model, which is tasked with imagining the possible actions and interactions that could be performed with the object. This allows the system to discover affordances without explicit training.
-
Affordance Ranking and Selection: RAIL ranks the generated affordances based on their likelihood and relevance, and selects the most promising ones for the robot to consider.
The researchers evaluated RAIL on a variety of object datasets and found that it was able to accurately predict the affordances of novel objects, outperforming baseline methods that relied on more traditional object recognition and affordance reasoning approaches.
Critical Analysis
One potential limitation of the RAIL approach is that it relies heavily on the quality and robustness of the underlying language models. If the language model has biases or gaps in its knowledge, this could lead to the system imagining incorrect or incomplete affordances. The researchers acknowledge this and suggest further work is needed to better understand the limitations of large language models in this context.
Additionally, while RAIL can discover novel affordances, it may struggle to reason about complex, context-dependent affordances that require more nuanced understanding of the object's physical properties and the specific task or environment. Further research could explore ways to integrate RAIL with other reasoning or physical simulation capabilities to address these more complex cases.
Overall, the RAIL system represents an interesting and promising direction for enabling more flexible and adaptive robot manipulation capabilities. By leveraging the power of large language models, it opens up new possibilities for robots to quickly learn about and interact with a wide variety of objects in their environments.
Conclusion
The RAIL system presented in this paper demonstrates a novel approach to robot affordance discovery and reasoning using large language models. By generating natural language descriptions of objects and then using those descriptions to imagine possible affordances, RAIL allows robots to adapt to new objects and environments without the need for extensive specialized training.
This work has significant implications for the field of robotics, as it could lead to more flexible, adaptable, and capable robot systems that can seamlessly interact with a wide range of objects and scenarios. While there are some limitations that require further research, the core ideas behind RAIL represent an exciting step forward in enabling robots to better understand and reason about the world around them.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤖
Uncertainty-driven Affordance Discovery for Efficient Robotics Manipulation
Pietro Mazzaglia, Taco Cohen, Daniel Dijkman
0
0
Robotics affordances, providing information about what actions can be taken in a given situation, can aid robotics manipulation. However, learning about affordances requires expensive large annotated datasets of interactions or demonstrations. In this work, we show active learning can mitigate this problem and propose the use of uncertainty to drive an interactive affordance discovery process. We show that our method enables the efficient discovery of visual affordances for several action primitives, such as grasping, stacking objects, or opening drawers, strongly improving data efficiency and allowing us to learn grasping affordances on a real-world setup with an xArm 6 robot arm in a small number of trials.
6/6/2024
🚀
Contextual Affordances for Safe Exploration in Robotic Scenarios
William Z. Ye, Eduardo B. Sandoval, Pamela Carreno-Medrano, Francisco Cru
0
0
Robotics has been a popular field of research in the past few decades, with much success in industrial applications such as manufacturing and logistics. This success is led by clearly defined use cases and controlled operating environments. However, robotics has yet to make a large impact in domestic settings. This is due in part to the difficulty and complexity of designing mass-manufactured robots that can succeed in the variety of homes and environments that humans live in and that can operate safely in close proximity to humans. This paper explores the use of contextual affordances to enable safe exploration and learning in robotic scenarios targeted in the home. In particular, we propose a simple state representation that allows us to extend contextual affordances to larger state spaces and showcase how affordances can improve the success and convergence rate of a reinforcement learning algorithm in simulation. Our results suggest that after further iterations, it is possible to consider the implementation of this approach in a real robot manipulator. Furthermore, in the long term, this work could be the foundation for future explorations of human-robot interactions in complex domestic environments. This could be possible once state-of-the-art robot manipulators achieve the required level of dexterity for the described affordances in this paper.
5/13/2024
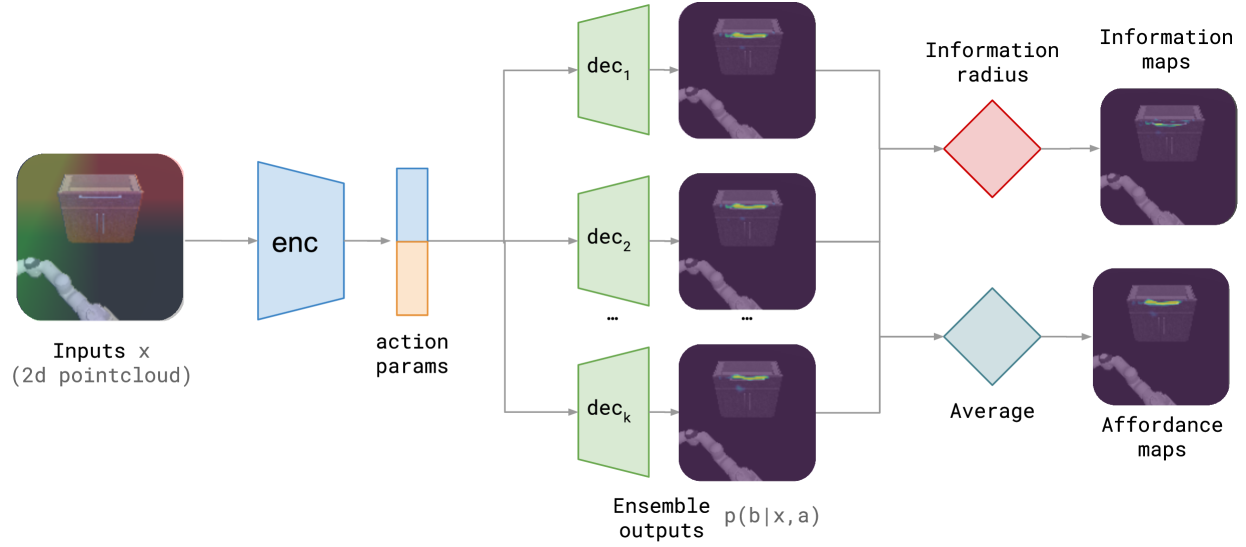
Information-driven Affordance Discovery for Efficient Robotic Manipulation
Pietro Mazzaglia, Taco Cohen, Daniel Dijkman
0
0
Robotic affordances, providing information about what actions can be taken in a given situation, can aid robotic manipulation. However, learning about affordances requires expensive large annotated datasets of interactions or demonstrations. In this work, we argue that well-directed interactions with the environment can mitigate this problem and propose an information-based measure to augment the agent's objective and accelerate the affordance discovery process. We provide a theoretical justification of our approach and we empirically validate the approach both in simulation and real-world tasks. Our method, which we dub IDA, enables the efficient discovery of visual affordances for several action primitives, such as grasping, stacking objects, or opening drawers, strongly improving data efficiency in simulation, and it allows us to learn grasping affordances in a small number of interactions, on a real-world setup with a UFACTORY XArm 6 robot arm.
6/7/2024

RoboPoint: A Vision-Language Model for Spatial Affordance Prediction for Robotics
Wentao Yuan, Jiafei Duan, Valts Blukis, Wilbert Pumacay, Ranjay Krishna, Adithyavairavan Murali, Arsalan Mousavian, Dieter Fox
0
0
From rearranging objects on a table to putting groceries into shelves, robots must plan precise action points to perform tasks accurately and reliably. In spite of the recent adoption of vision language models (VLMs) to control robot behavior, VLMs struggle to precisely articulate robot actions using language. We introduce an automatic synthetic data generation pipeline that instruction-tunes VLMs to robotic domains and needs. Using the pipeline, we train RoboPoint, a VLM that predicts image keypoint affordances given language instructions. Compared to alternative approaches, our method requires no real-world data collection or human demonstration, making it much more scalable to diverse environments and viewpoints. In addition, RoboPoint is a general model that enables several downstream applications such as robot navigation, manipulation, and augmented reality (AR) assistance. Our experiments demonstrate that RoboPoint outperforms state-of-the-art VLMs (GPT-4o) and visual prompting techniques (PIVOT) by 21.8% in the accuracy of predicting spatial affordance and by 30.5% in the success rate of downstream tasks. Project website: https://robo-point.github.io.
6/18/2024