Uncertainty-driven Affordance Discovery for Efficient Robotics Manipulation
2308.14915
0
0
🤖
Abstract
Robotics affordances, providing information about what actions can be taken in a given situation, can aid robotics manipulation. However, learning about affordances requires expensive large annotated datasets of interactions or demonstrations. In this work, we show active learning can mitigate this problem and propose the use of uncertainty to drive an interactive affordance discovery process. We show that our method enables the efficient discovery of visual affordances for several action primitives, such as grasping, stacking objects, or opening drawers, strongly improving data efficiency and allowing us to learn grasping affordances on a real-world setup with an xArm 6 robot arm in a small number of trials.
Create account to get full access
Overview
- Robotics affordances, which provide information about possible actions in a given situation, can aid robotic manipulation tasks
- However, learning about affordances typically requires large, expensive datasets of annotated interactions or demonstrations
- This paper shows how active learning can help mitigate this problem, using uncertainty to drive an interactive affordance discovery process
Plain English Explanation
Robotics affordances are bits of information that tell a robot what actions it can take in a particular situation. For example, an affordance might tell a robot that a mug on a table can be grasped. These affordances are very useful for helping robots manipulate objects, but learning about them usually requires collecting large, expensive datasets of example interactions or demonstrations.
This paper presents a new approach that uses active learning to efficiently discover visual affordances. Active learning means the robot actively decides which examples it needs to learn more about, rather than just passively learning from a fixed dataset. The key insight is to use the robot's uncertainty about the affordances to guide this active learning process. By focusing on the areas it's most uncertain about, the robot can learn the important affordances it needs with much less data.
The researchers show that this method allows the robot to efficiently learn affordances for actions like grasping, stacking objects, and opening drawers. They demonstrate this on a real-world setup with an xArm 6 robot arm, where the robot was able to learn grasping affordances with just a small number of trials.
Technical Explanation
The core idea of this paper is to use active learning to efficiently discover visual affordances for robotic manipulation tasks. Affordances are pieces of information that indicate what actions can be performed in a given situation, like being able to grasp a mug or open a drawer.
Traditionally, learning affordances has required expensive datasets of annotated human-robot interactions or demonstrations. The authors propose using the robot's uncertainty about the affordances to guide an interactive learning process. By focusing data collection on the areas the robot is most uncertain about, they can learn the key affordances needed for manipulation with much less data.
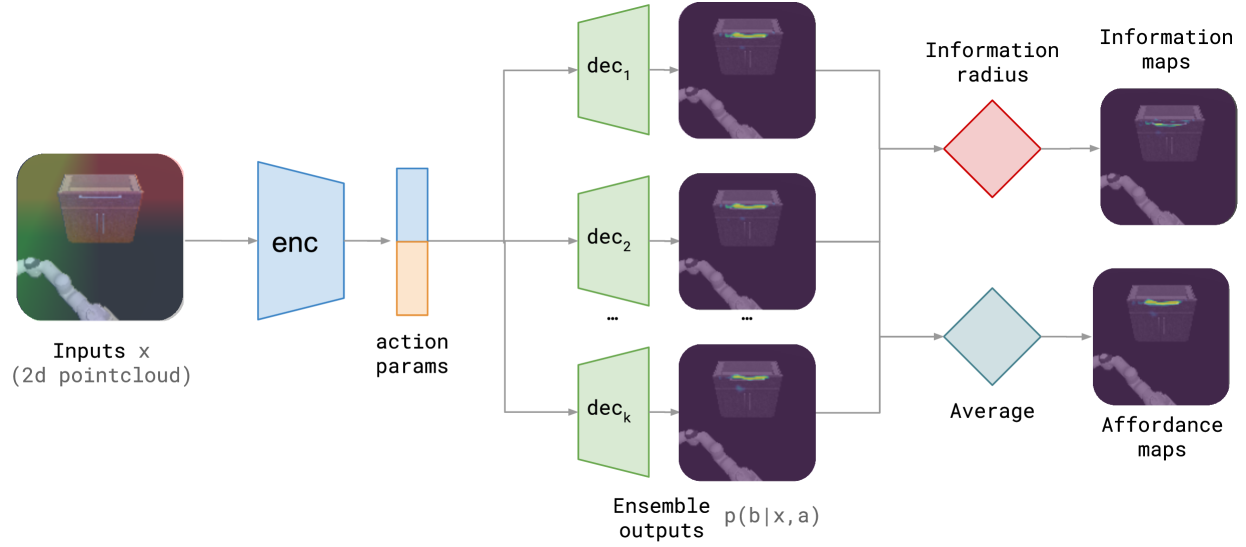
Specifically, the robot uses a neural network to predict affordances from visual input. The network outputs a probability distribution over possible affordances, and the authors use the entropy of this distribution as a measure of the robot's uncertainty. High entropy indicates high uncertainty, so the robot selects examples to label that have the highest entropy.
The authors evaluate this active affordance learning approach on several robotic manipulation tasks, including grasping, stacking objects, and opening drawers. They show that their method can efficiently discover the relevant affordances, significantly outperforming passive learning from a fixed dataset. They also demonstrate the approach on a real-world setup with an xArm 6 robot arm, where it was able to learn grasping affordances in just a small number of trials.
Critical Analysis
The key strength of this work is its use of active learning to make affordance discovery much more data-efficient. By having the robot focus on the areas it's most uncertain about, the authors are able to learn the necessary affordances with far less labeled data than traditional approaches.
That said, a potential limitation is that the active learning process itself requires the robot to explore and interact with the environment, which could be unsafe or impractical in certain applications. There may be a need to balance exploration and exploitation, or to incorporate safety constraints into the active learning process.
Additionally, the experiments in this paper focused on relatively simple manipulation tasks. It's unclear how well the approach would scale to more complex, dynamic environments or tasks that require reasoning about higher-level affordances. Further research may be needed to understand the limitations and broader applicability of this method.
Conclusion
This paper presents an innovative approach to learning robotic affordances using active learning. By having the robot focus on the areas it's most uncertain about, the method can efficiently discover the key affordances needed for manipulation tasks like grasping, stacking, and opening drawers. The results demonstrate the potential of active learning to significantly reduce the amount of data required for affordance discovery, which could have important implications for making robotic manipulation more practical and accessible.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Information-driven Affordance Discovery for Efficient Robotic Manipulation
Pietro Mazzaglia, Taco Cohen, Daniel Dijkman
0
0
Robotic affordances, providing information about what actions can be taken in a given situation, can aid robotic manipulation. However, learning about affordances requires expensive large annotated datasets of interactions or demonstrations. In this work, we argue that well-directed interactions with the environment can mitigate this problem and propose an information-based measure to augment the agent's objective and accelerate the affordance discovery process. We provide a theoretical justification of our approach and we empirically validate the approach both in simulation and real-world tasks. Our method, which we dub IDA, enables the efficient discovery of visual affordances for several action primitives, such as grasping, stacking objects, or opening drawers, strongly improving data efficiency in simulation, and it allows us to learn grasping affordances in a small number of interactions, on a real-world setup with a UFACTORY XArm 6 robot arm.
6/7/2024
🚀
Contextual Affordances for Safe Exploration in Robotic Scenarios
William Z. Ye, Eduardo B. Sandoval, Pamela Carreno-Medrano, Francisco Cru
0
0
Robotics has been a popular field of research in the past few decades, with much success in industrial applications such as manufacturing and logistics. This success is led by clearly defined use cases and controlled operating environments. However, robotics has yet to make a large impact in domestic settings. This is due in part to the difficulty and complexity of designing mass-manufactured robots that can succeed in the variety of homes and environments that humans live in and that can operate safely in close proximity to humans. This paper explores the use of contextual affordances to enable safe exploration and learning in robotic scenarios targeted in the home. In particular, we propose a simple state representation that allows us to extend contextual affordances to larger state spaces and showcase how affordances can improve the success and convergence rate of a reinforcement learning algorithm in simulation. Our results suggest that after further iterations, it is possible to consider the implementation of this approach in a real robot manipulator. Furthermore, in the long term, this work could be the foundation for future explorations of human-robot interactions in complex domestic environments. This could be possible once state-of-the-art robot manipulators achieve the required level of dexterity for the described affordances in this paper.
5/13/2024

RAIL: Robot Affordance Imagination with Large Language Models
Ceng Zhang, Xin Meng, Dongchen Qi, Gregory S. Chirikjian
0
0
This paper introduces an automatic affordance reasoning paradigm tailored to minimal semantic inputs, addressing the critical challenges of classifying and manipulating unseen classes of objects in household settings. Inspired by human cognitive processes, our method integrates generative language models and physics-based simulators to foster analytical thinking and creative imagination of novel affordances. Structured with a tripartite framework consisting of analysis, imagination, and evaluation, our system analyzes the requested affordance names into interaction-based definitions, imagines the virtual scenarios, and evaluates the object affordance. If an object is recognized as possessing the requested affordance, our method also predicts the optimal pose for such functionality, and how a potential user can interact with it. Tuned on only a few synthetic examples across 3 affordance classes, our pipeline achieves a very high success rate on affordance classification and functional pose prediction of 8 classes of novel objects, outperforming learning-based baselines. Validation through real robot manipulating experiments demonstrates the practical applicability of the imagined user interaction, showcasing the system's ability to independently conceptualize unseen affordances and interact with new objects and scenarios in everyday settings.
6/10/2024
📉
Quick and Accurate Affordance Learning
Fedor Scholz, Erik Ayari, Johannes Bertram, Martin V. Butz
0
0
Infants learn actively in their environments, shaping their own learning curricula. They learn about their environments' affordances, that is, how local circumstances determine how their behavior can affect the environment. Here we model this type of behavior by means of a deep learning architecture. The architecture mediates between global cognitive map exploration and local affordance learning. Inference processes actively move the simulated agent towards regions where they expect affordance-related knowledge gain. We contrast three measures of uncertainty to guide this exploration: predicted uncertainty of a model, standard deviation between the means of several models (SD), and the Jensen-Shannon Divergence (JSD) between several models. We show that the first measure gets fooled by aleatoric uncertainty inherent in the environment, while the two other measures focus learning on epistemic uncertainty. JSD exhibits the most balanced exploration strategy. From a computational perspective, our model suggests three key ingredients for coordinating the active generation of learning curricula: (1) Navigation behavior needs to be coordinated with local motor behavior for enabling active affordance learning. (2) Affordances need to be encoded locally for acquiring generalized knowledge. (3) Effective active affordance learning mechanisms should use density comparison techniques for estimating expected knowledge gain. Future work may seek collaborations with developmental psychology to model active play in children in more realistic scenarios.
5/14/2024